ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 27.03.2024
Просмотров: 23
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

[Введите цитату из документа или краткое описание интересного события. Надпись можно поместить в любое место документа. Для изменения форматирования надписи, содержащей броские цитаты, используйте вкладку "Работа с надписями".]
-
Полюса и нули замкнутой системы. Корневые показатели качества.
Найдем нули и полюса замкнутой системы, приравняв числитель и знаменатель передаточной функции к нулю.
Числитель:
 ;
; ;
; ;
; ;
;Знаменатель:
 ;
;Найдем корни этого уравнения с помощью программного пакета MathCAD 15 (рисунок 11).
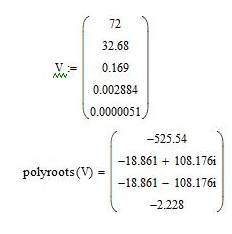
Рисунок 11 − Нахождение полюсов в MathCAD 15
Из рисунка 11:
 ;
; ;
; ;
; ;
; - нули замкнутой системы,
- нули замкнутой системы,  - полюса замкнутой системы.
- полюса замкнутой системы.Изобразим нули и полюса на комплексной плоскости (рисунок 12)
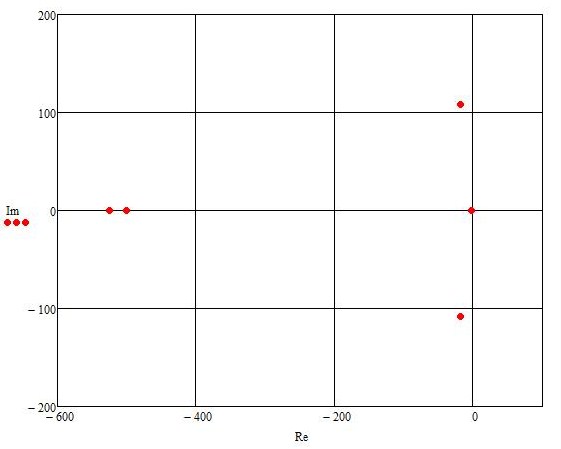
Рисунок 12 − Нули и полюса на комплексной плоскости
Из-за разности порядка величин масштаб графика завышен, вследствие чего точки
 и
и  практически слились. Так как
практически слились. Так как  это ноль, а
это ноль, а  - полюс, проверим, не компенсируют ли они друг друга. Условие компенсации:
- полюс, проверим, не компенсируют ли они друг друга. Условие компенсации:  , где
, где 
- полюс, а
 - ноль.
- ноль.Подставим
и в данное условие. − выполняется. Значит полюс и ноль взаимно компенсируются.
− выполняется. Значит полюс и ноль взаимно компенсируются.Определим корневые показатели качества:
 − показатель колебательности (отношение мнимой части ближайшего к оси Im комплексного корня, к его действительной части);
− показатель колебательности (отношение мнимой части ближайшего к оси Im комплексного корня, к его действительной части);Оценим перерегулирование:

 − степень устойчивости (расстояние от оси Im до ближайшего корня);
− степень устойчивости (расстояние от оси Im до ближайшего корня);Оценим быстродействие системы. Примем
 .
. ;
;-
Переходная характеристика системы. Прямые показатели качества.
Получим выражение для построения переходной характеристики системы:
 ;
; ;
;Выполним обратное преобразование Лапласа в программном пакете MathCAD 15 c помощью функции invlaplace.

 ;
;Построим переходную характеристику системы с помощью программного пакета Matlab в среде Simulink. Модель для построения переходной характеристики аналогична модели на рисунке 9 с небольшим дополнением для отображения коридора.
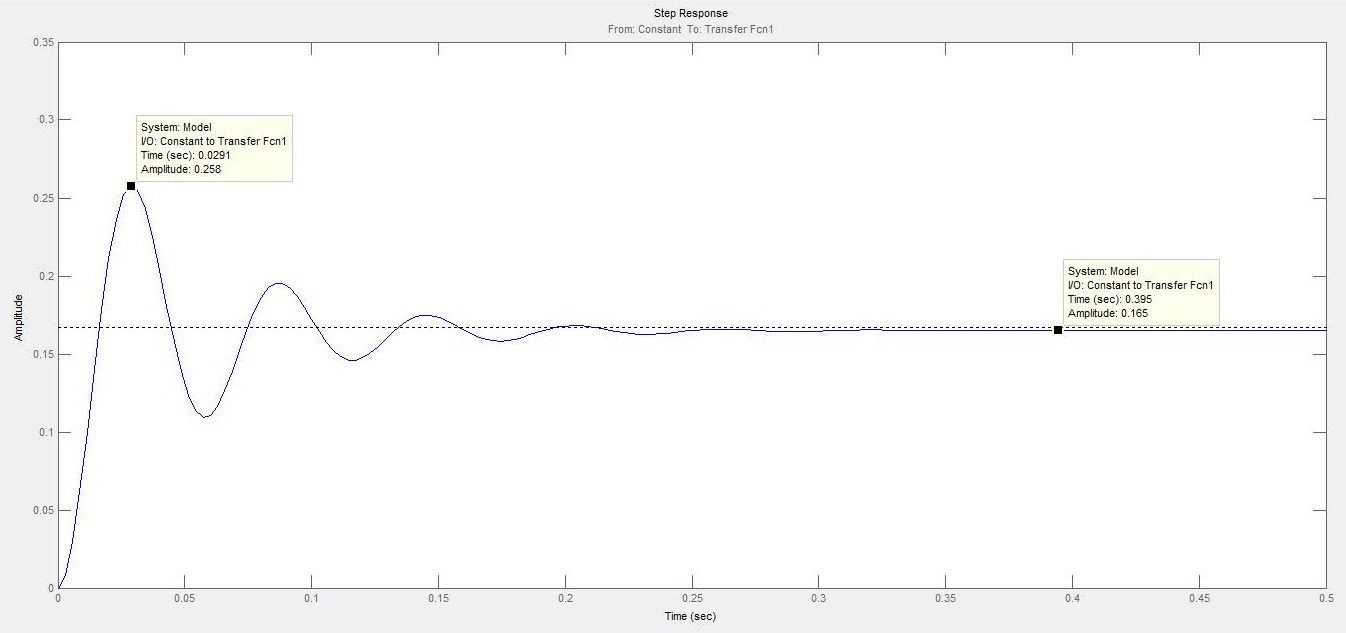
Рисунок 13 − Переходная характеристика системы
Из рисунка 13 видно, что
 , а
, а  .
.Определим перерегулирование системы:
 ;
;Определим время переходного процесса
 . Для этого отобразим на графике переходной характеристики 5%-ный коридор. График увеличен в окрестности точки вхождения переходной характеристики в коридор (рисунок 14).
. Для этого отобразим на графике переходной характеристики 5%-ный коридор. График увеличен в окрестности точки вхождения переходной характеристики в коридор (рисунок 14).
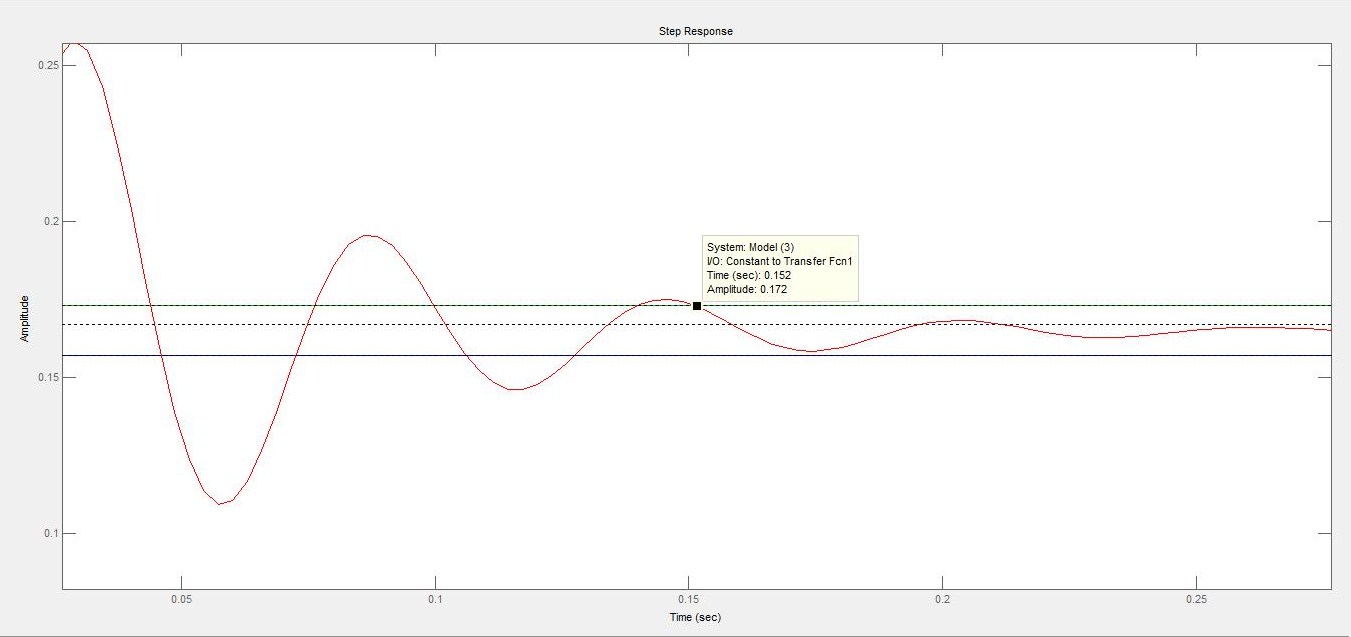
Рисунок 14 − Увеличение графика переходной характеристики для определения времени переходного процесса
Из рисунка 14 −
 с.
с.-
Коэффициенты ошибок. График ошибки системы при обработке линейного сигнала.
Рассчитаем коэффициенты ошибок системы.
 ;
; − коэффициенты ошибок.
− коэффициенты ошибок.Определим ошибку при линейно нарастающем входном сигнале.

 ;
; ;
;Коэффициент
 найдем с помощью программного пакета MathCAD 15 (рисунок 15).
найдем с помощью программного пакета MathCAD 15 (рисунок 15). Из рисунка 15 видно, что
 .
.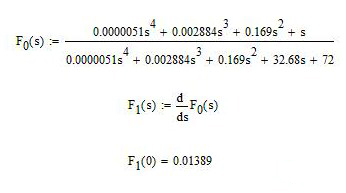
Рисунок 15 − Нахождение коэффициента
в MathCAD 15 − расчетная ошибка.
− расчетная ошибка.Т.к. входной линейно нарастающий сигнал система обрабатывает с постоянной ошибкой, можно сделать вывод, что в системе имеет место астатизм первого порядка. Это объясняется наличием в прямой цепи системы интегратора.
Экспериментальную ошибку найдем с помощью функции invlaplace программного пакета MathCAD 15.
 ;
;
 ;
;С помощью программного пакета Matlab в среде Simulink построим график экспериментальной ошибок (рисунок 17). Для построения используем модель (рисунок 16). Осциллограф Scope1 покажет график ошибки.
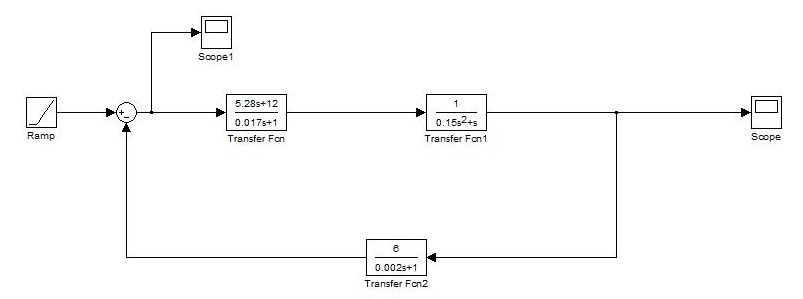
Рисунок 16 − Модель для получения графика ошибки при подаче на вход линейно нарастающего сигнала
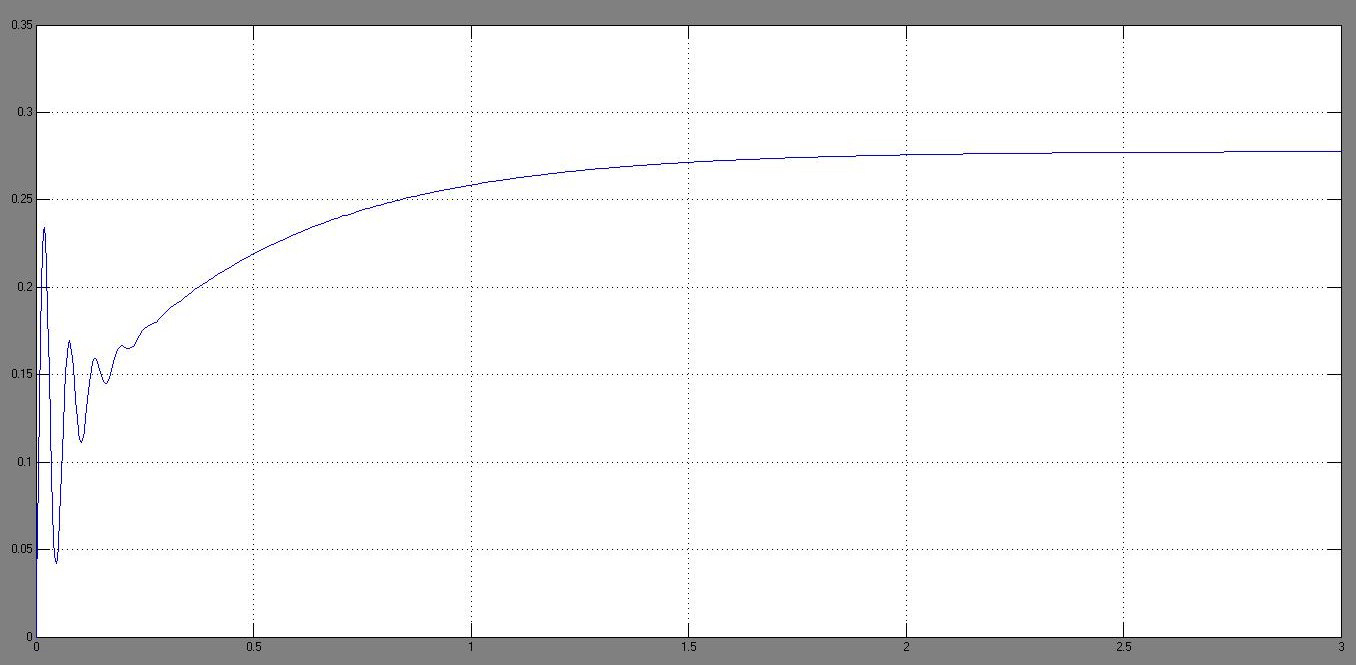
Рисунок 17 − График экспериментальной ошибки
Как видно из графика, установившаяся ошибка стремится к расчетной.
-
Реакция системы на гармонический сигнал. Амплитудно-фазовые искажения.
Определим реакцию системы на гармонический входной сигнал с амплитудой А=20 В/с и частотой
 рад/с.
рад/с.Найдем изображение входного сигнала с помощью программного пакета MathCAD 15 (рисунок 18).
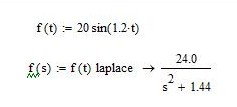
Рисунок 18 − Изображение входного сигнала в MathCAD 15
Тогда, реакция системы на входной гармонический сигнал, построенная в MathCAD 15 (рисунок 19):
 ;
;
 ;
;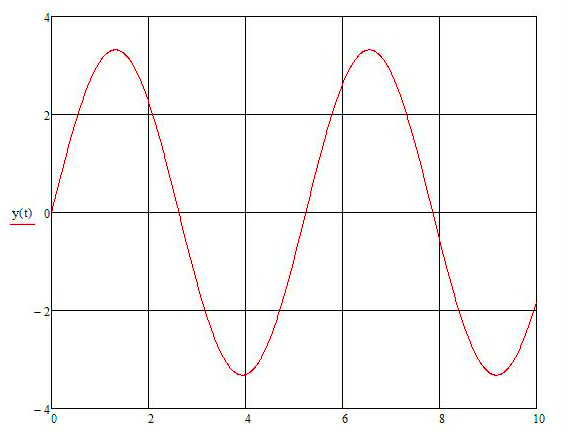
Рисунок 19 − Реакция системы на входной гармонический сигнал
Ошибка системы при входном гармоническом сигнале (рисунок 20):
 ;
;
 ;
;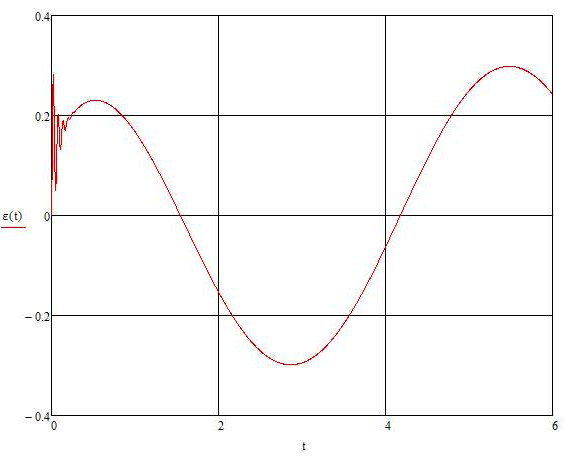
Рисунок 20 − Ошибка при входном гармоническом сигнале
Определим амплитудно-фазовые искажения. Построим графики входного и выходного сигнала в одной плоскости с помощью программного пакета Matlab в среде Simulink (рисунок 22). Используем модель, приведенную на рисунке 21.
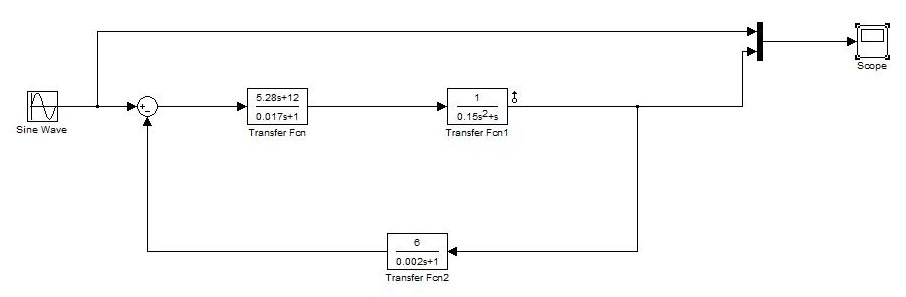
Рисунок 21 − Модель для построения на одной плоскости графиков входного и выходного сигналов
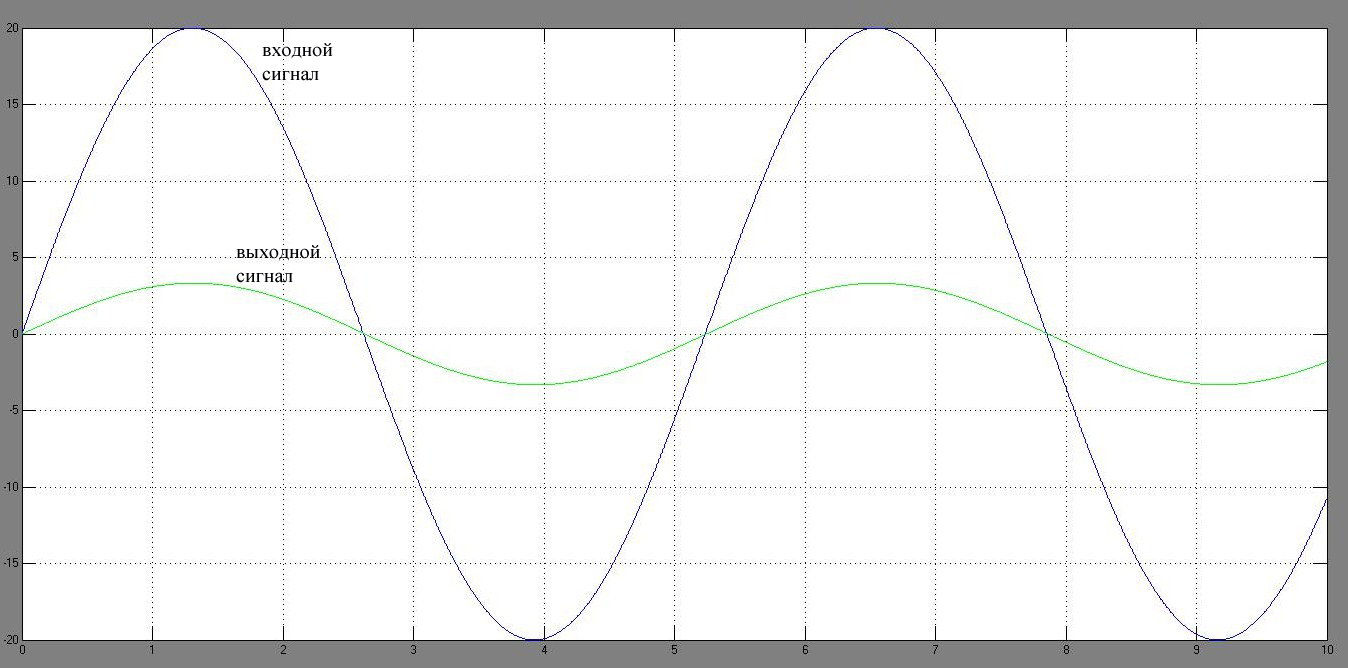
Рисунок 22 − Графики входного и выходного сигнала
Амплитудные искажения
Для определения фазовых искажений увеличим график в окрестности пересечения функциями оси t (рисунок 23).
Из графика на рисунке 23 −
 , тогда
, тогда  град.
град.В пункте 4 мы получили значения
 ,
,  град.
град.Небольшое расхождение в значениях связано с неточностью снятия данных с графиков.
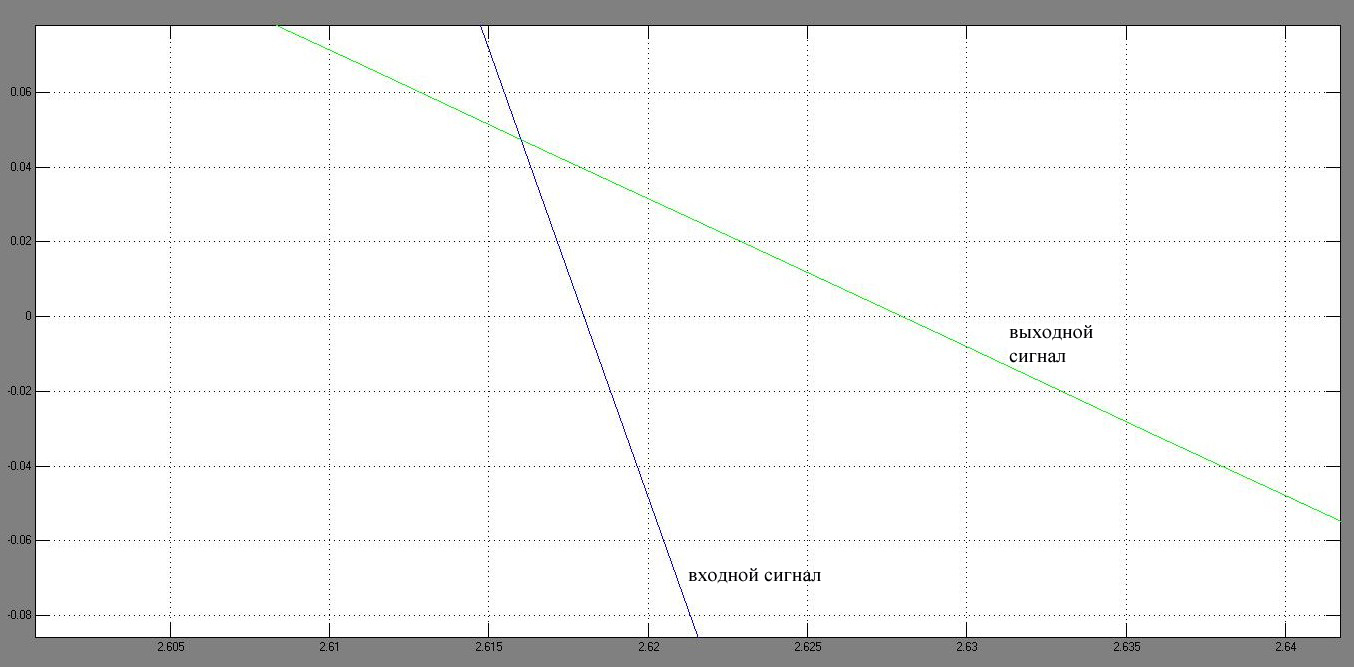
Рисунок 23 − Увеличение графиков входного и выходного сигнала в окрестности пересечения оси t
Построим график вынужденной составляющей ошибки в MathCAD 15.
 ;
; ;
; ;
;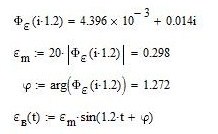
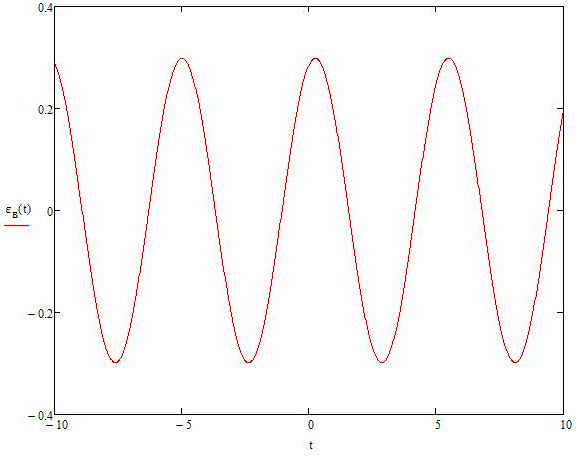
Рисунок 24 − График вынужденной составляющей ошибки
Заключение
В ходе выполнения курсовой работы был проведен анализ системы. Система оказалась устойчива, что было подтверждено критериями Найквиста с использованием АФЧХ и ЛЧХ. Были найдены: критический коэффициент усиления системы; прямые, частотные и корневые показатели качества. Также была исследована точность системы, рассчитаны и построены графики ошибок при отработке системой линейного и гармонического сигналов.
К преимуществам системы можно отнести небольшое время переходного процесса, а также невысокие показатели перерегулирования и колебательности.
Библиографический список
-
Бесекерский, В.А.Теория систем автоматического регулирования / В.А. Бесекерский, Е.П. Попов. – 3-е изд. – Москва: Наука, 1975. – 767с. -
Макаров, И.М. Линейные автоматические системы / И.М. Макаров, Б.М. Менский. – 2-е изд. – Москва: Машиностроение, 1982. – 504 с. -
Павловская, О.О. Теория автоматического управления: учебное пособие к лабораторным и курсовым работам / О.О. Павловская, И.В. Чернецкая. – Челябинск: Издательский центр ЮУрГУ, 2010. – 93 с. -
Долбенков, В.И. Simulink в задачах систем автоматического управления: учебное пособие / В.И. Долбенков. – Челябинск: Изд-во ЮУрГУ, 2005. – 101 с.

