Файл: Курсовая работа по учебному курсу Теория механизмов и машин.docx
Добавлен: 28.03.2024
Просмотров: 19
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

М
 инистерство образования и науки Российской Федерации
инистерство образования и науки Российской Федерациифедеральное государственное бюджетное образовательное учреждение высшего образования
«Тольяттинский государственный университет»
КУРСОВАЯ РАБОТА
по учебному курсу «Теория механизмов и машин»
Вариант 14
| Студент | Онищенко С.А. (И.О. Фамилия) |
| Группа | ТБбп-2006а |
| Ассистент | (И.О. Фамилия) |
| Преподаватель | Балахнина А.А. (И.О. Фамилия) |
Тольятти 2022
Оглавление
Оглавление 2
1Кинематический анализ механизма 3
1.1Исходные данные 3
1.2Структурный анализ механизма 4
1.3Построение планов положений механизмов 5
1.4Построение планов скоростей . 6
1.5Построение планов ускорений 8
1.6Построение кинематических диаграмм 10
1.6.1Построение диаграмма перемещения ползуна 10
1.6.2Построение диаграмма скорости ползуна. 11
1.6.3Построение диаграмма ускорений ползуна. 11
1.6.4Сравнительный анализ метода планов и метода диаграмм. 12
2Динамический синтез кулачкового механизма 13
2.1Исходные данные 13
2.2Построение диаграмм 14
2.2.1Диаграмма перемещений 14
2.2.2Диаграмма скоростей 14
2.2.3Диаграмма ускорений 14
2.3Построение профиля кулачка. 15
Литература 17
-
Кинематический анализ механизма
-
Исходные данные
-
| ВАРИАНТ 5 | ||
| Тема 1 | ||
| Кинематическая схема механизма | Число оборотов кривошипа nОА (об/мин) | Размеры звеньев и расстояния, мм. |
 | 550 | lОА = 95 lАB = 475 lВC = 540 lCD = 160 lDО1 = 210 a = 160 b = 120 |
-
Структурный анализ механизма
На рисунке 1.1 Изобразим структурную схему механизма
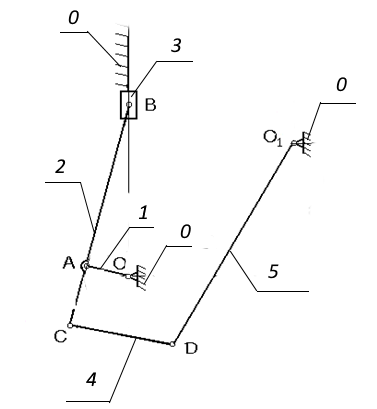
Рис. 1.1 Структурная схема
Далее проведем структурный анализ механизма.
Составим описание звеньев и кинематических пар механизма и занесём их соответственно в таблицу 1.1 и таблицу 1.2.
Таблица 1.1Характеристика звеньев механизма
| № | Характер движения | Название |
| 1 | Вращательное | Кривошип |
| 2 | Плоскопараллельное | Шатун |
| 3 | Поступательное | Ползун |
| 4 | Плоскопараллельное | Шатун |
| 5 | Плоскопараллельное | Коромысло |
| 0 | Неподвижное | Стойка |
Таблица 1.2 Кинематические пары механизма
| № -№ | Звенья в пары | Тип пары | Класс |
| 1 | стойка 0 – кривошип 1 | вращательная | 5 |
| 2 | кривошип 1 –шатун 2 | вращательная | 5 |
| 3 | шатун 2 – ползун 3 | вращательная | 5 |
| 4 | ползун 3 – стойка 0 | поступательная | 5 |
| 5 | шатун 2 –шатун 4 | вращательная | 5 |
| 6 | шатун 4 – коромысло 5 | вращательная | 5 |
| 7 | коромысло 5 – стойка 0 | вращательная | 5 |
Степень свободы плоского механизма находится по формуле Чебышева


где n – число подвижных звеньев, в данном механизме их 5 (табл. 1.1);
 – число кинематических пар 5 класса, в данном механизме их 7 (табл. 1.2);
– число кинематических пар 5 класса, в данном механизме их 7 (табл. 1.2); – количество пар 4 класса, в данном механизме их нет (табл. 1.2).
– количество пар 4 класса, в данном механизме их нет (табл. 1.2).-
Построение планов положений механизмов
На плане механизма отобразим входное звено ОА отрезком длиной 38 мм.
Масштабный коэффициент планов механизма:

В принятом масштабе пересчитываем отрезки на чертеже:
Находим крайнее положение, в котором кривошип и шатун вытянутся в одну линию и ползун занимает крайнюю верхнюю точку. От этого положения будем отсчитывать остальные положения. Отмечаем положения кривошипа с шагом 30 градусов.
Рассмотрим построение второго положения. Наносим на чертеже все неподвижные оси: шарниры О, О1 и линию движения ползуна В. Из точки О проводим отрезок длинной кривошипа АО, из точки А проводим засечку до линии движения ползуна 3 Таким образом находим точку B. По пропорции находим точку С. Из точки С - дугу окружности радиусом DC. Из точки O1 - дугу окружности радиусом DO1. Таким образом находим точку D.
-
Построение планов скоростей .
Рассмотрим построение плана скоростей на примере пятого положения механизма. Угловая скорость начального звена ОА:

Скорость точки А:

Скорости остальных точек механизма находим путём построения плана скоростей. Принимаем длину отрезка
 , изображающего скорость
, изображающего скорость  точки А, равной 109,5 мм. Тогда масштаб плана скоростей:
точки А, равной 109,5 мм. Тогда масштаб плана скоростей:
Рассматривая движение точки В вместе с точкой А и относительно этой точки, получим векторные уравнения для построения скорости точки
где VВА - скорость точки А во вращательном движении относительно точки В, направлена перпендикулярно оси звена АВ;
Из точки а проводим линию, перпендикулярную оси звена АВ, а из полюса P плана скоростей - линию, вертикальную линию по оси Y. Точка b пересечения этих линий даст конец вектора искомой скорости VВ . Скорость точкиCопределяем по правилу подобия:

Определяем скорость точки D путем графического решения следующих векторных равенств:
где VDC - скорость точки D во вращательном движении относительно точки C, направлена перпендикулярно оси звена CD;
где VDO1 - скорость точки D во вращательном движении относительно точки O1, направлена перпендикулярно оси звена O1D;
Из точки c проводим линию, перпендикулярную оси звена CD, а из полюса P плана скоростей - проводим линию, перпендикулярную оси звена O1D. Точка dпересечения этих линий даст конец вектора искомой скорости VD. Определим значения всех скоростей



Определение угловых скоростей звеньев:



Значения для начального положения



Определение угловых скоростей звеньев:


-
Построение планов ускорений
Точка А кривошипа будет иметь только нормальное ускорение, величина которого равна:

Рассматривая движение точки В вместе с точками А и С (относительное движение) и относительно этих точек, получаю векторные уравнения для построения ускорения точки В:
где aВАn – нормальное ускорение точки В вокруг А, направленное //-но AB;
aBАτ - тангенциальное ускорение точки В вокруг А, направленное перпендикулярно AB;
aА = ускорение точки А;

На плане ускорений через точку а вектора πa проводим прямую, ||-но оси звена АB, и откладываем на ней в направлении от точки A к точке B отрезок нормального ускорения. Через конец этого вектора проводим прямую, перпендикулярноно к оси звена АВ. Затем через полюс π проводим отрезок параллельно оси Y-Y. Точка пересечения этих прямых определит конец вектора πb. Точку C на плане ускорений находим по правилу подобия, пользуясь соотношением отрезков, аналогично плану скоростей.
Ускорение точки D
где aDCn - нормальное ускорение точки Dшатуна DC при вращении его вокруг точки C, направлено вдоль оси звена DC от точки D к точке C;
aDCτ – тангенциальное ускорение точки D шатуна DC при вращении его вокруг точки C, направленное перпендикулярно звену DC;
Величина нормального ускорения aDCn определяется по формуле:

aDOn – нормальное ускорение точки D вокруг О1, направленное //-но О