Файл: Для структурной схемы сау, соответствующей выбранному варианту, выполнить следующие действия.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 28.04.2024
Просмотров: 21
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

w1=5.754
w2=1.225
мнимая часть:
V(w)=

w1=0; w2= 2.53
Находим пересечения с осями:
 -0.01
-0.01

 -130.86
-130.86
 58.38
58.38

| w | 0 | 1.225 | 2.53 | 5.754 |
| U(w) | 49.7 | 0.01 | -130.86 | -0.01 |
| V(w) | 0 | 58.38 | -0.31 | -1499.286 |
Из годографа видно, что система огибает начало координат против часовой стрелки последовательно n-квадрантов, следовательно, замкнутая система устойчива, что было подтверждено в пункте 6.
ЗАДАНИЕ 9. Определить величину поправочного коэффициента усиления, при котором статическая ошибка замкнутой системы будет не больше 0.1; перерегулирование в системе составит 12 %; время переходного процесса будет минимальным.

W


Wзс= feedback(W*46.125,1)
Wзс=



2)


Чтобы перерегулирование в системе составило 12%, изменим коэффициент передачи в передаточной функции разомкнутой системы.
W=

Wзс=feedback(W*180,1)
Wзс=

 ;
;
3) Wпц=
 ;
;Wзс=
 ;
;Поправочный коэффициент усиления, при минимальном времени переходного процесса (1,44) равен 46,154
 .
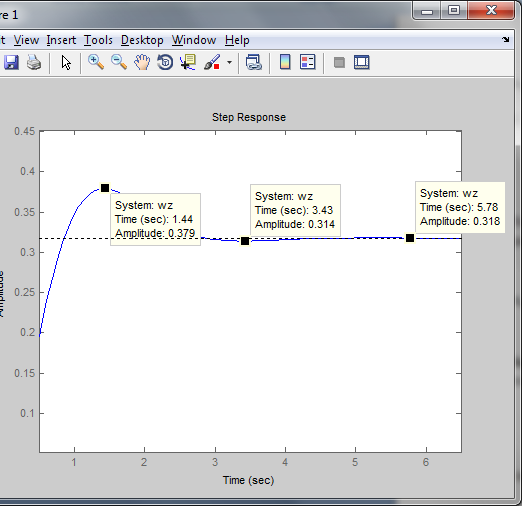
.Задание 10. Построить с переходную функцию замкнутой системы и оценить основные показатели качества регулирования (перерегулирование и время регулирования) в системе.
Wпц=
;Wзс=
;
Основные показатели:
Статистическая ошибка:
 1-0,318=0,682
1-0,318=0,682Динамическая ошибка:
 0,379-0,318=0,061
0,379-0,318=0,061Время регулирования:
 3.43
3.43Перерегулирование:

Литература
-
Лекции по дисциплине: "Основы теории управления" / В.В.Гетман -
Анализ и синтез линейных систем автоматического управления: лабораторный практикум / В.В.Гетман, Н.В. Лежнева. - Казань: Изд-во Казан. Гос. Технол. Ун-та, 2007. - 64с. -
Методы синтеза линейных систем автоматического управления: методические указания к лабораторным работам / сост.: В.В.Гетман, Н.В. Лежнева. - Нижнекамск: Нижнекамский химико-технологический институт (филиал) КГТУ, 2010. -44 с.
>> w=tf([2],[0.5,1])
Transfer function:
2
---------
0.5 s + 1
>> w1=tf([2],[0.5,1])
Transfer function:
2
---------
0.5 s + 1
>> w2=tf([2])
Transfer function:

2
>> w3=tf([0.2,1],[0.6,1])
Transfer function:
0.2 s + 1
---------
0.6 s + 1
>> w4=tf([15],[0.7,1])
Transfer function:
15
---------
0.7 s + 1
>> w=tf([19])
Transfer function:
19
>> w=tf([0.15,1],[0.75,1])
Transfer function:
0.15 s + 1
----------
0.75 s + 1
>> w5=tf([19])
Transfer function:
19
>> w6=tf([0.15,1],[0.75,1])
Transfer function:
0.15 s + 1
----------
0.75 s + 1
>> w7=w2+w4
Transfer function:
1.4 s + 17
----------
0.7 s + 1
>> w8=w3/(1+w2*w3*w5)
Transfer function:
0.12 s^2 + 0.8 s + 1
----------------------
4.92 s^2 + 31.6 s + 39
>> wraz=(w1*w7*w8)/(1+w1*w6*w7*w8)
Transfer function:
0.4339 s^8 + 13.02 s^7 + 150 s^6 + 891 s^5 + 3036 s^4 + 6169 s^3 + 7396 s^2 + 4830 s + 1326
----------------------------------------------------------------------------------------------------------------------------
2.224 s^9 + 46.87 s^8 + 423.2 s^7 + 2166 s^6 + 6996 s^5 + 1.499e004 s^4 + 2.155e004 s^3 + 2.023e004 s^2 + 1.129e004 s + 2847
>> zpk(wraz)
Zero/pole/gain:
0.19512 (s+12.14) (s+5) (s+4.756) (s+2) (s+1.667)^2 (s+1.429) (s+1.333)
-------------------------------------------------------------------------------
(s+4.756) (s+4.752) (s+2.795) (s+2) (s+1.667)^2 (s+1.429) (s^2 + 2.01s + 2.554)
>> nyquist(wraz)
>> bode(wraz)
>> pole(wraz)
ans =
-4.7561
-4.7517
-2.7950
-1.0051 + 1.2423i
-1.0051 - 1.2423i
-2.0000
-1.6667 + 0.0000i
-1.6667 - 0.0000i
-1.4286
>> margin(wraz)
>> feedback(wraz,1)
Transfer function:
0.4339 s^8 + 13.02 s^7 + 150 s^6 + 891 s^5 + 3036 s^4 + 6169 s^3 + 7396 s^2 + 4830 s + 1326
---------------------------------------------------------------------------------------------------------------------------
2.224 s^9 + 47.3 s^8 + 436.3 s^7 + 2316 s^6 + 7887 s^5 + 1.802e004 s^4 + 2.772e004 s^3 + 2.763e004 s^2 + 1.612e004 s + 4173
>> wz=feedback(wraz,1)
Transfer function:
0.4339 s^8 + 13.02 s^7 + 150 s^6 + 891 s^5 + 3036 s^4 + 6169 s^3 + 7396 s^2 + 4830 s + 1326
---------------------------------------------------------------------------------------------------------------------------
2.224 s^9 + 47.3 s^8 + 436.3 s^7 + 2316 s^6 + 7887 s^5 + 1.802e004 s^4 + 2.772e004 s^3 + 2.763e004 s^2 + 1.612e004 s + 4173
>> zpk(wz)
Zero/pole/gain:
0.19512 (s+12.14) (s+5) (s+4.756) (s+2) (s+1.667)^2 (s+1.429) (s+1.333)
--------------------------------------------------------------------------------
(s+4.785) (s+4.756) (s+2.178) (s+2) (s+1.667)^2 (s+1.429) (s^2 + 2.789s + 4.769)
>> w1=tf([1,4.785])
Transfer function from input 1 to output:
1
Transfer function from input 2 to output:
4.785
>> w=wz*46.125
Transfer function:
20.02 s^8 + 600.4 s^7 + 6917 s^6 + 4.11e004 s^5 + 1.4e005 s^4 + 2.846e005 s^3 + 3.411e005 s^2 + 2.228e005 s + 6.116e004
---------------------------------------------------------------------------------------------------------------------------
2.224 s^9 + 47.3 s^8 + 436.3 s^7 + 2316 s^6 + 7887 s^5 + 1.802e004 s^4 + 2.772e004 s^3 + 2.763e004 s^2 + 1.612e004 s + 4173
>> step(w)
>>