ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 05.05.2024
Просмотров: 37
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

СОДЕРЖАНИЕ
Передаточная функция: W(p) = k.
Переходная характеристика: h(t) = k 1(t).
Передаточная функция пропорционального звена равна его коэффициенту передачи – W(p) = k.
Усилительное звено не трансформирует форму входного сигнала, а изменяет только его масштаб в k раз.
Ответы на экзаменационные вопросы по предмету ТАУ
-
Классификация систем автоматического управления по разным признакам. Привести примеры
Системы автоматического управления классифицируются с использованием разных признаков, поэтому классификация этих систем разнообразна и отображает большое разнообразие систем автоматического управления. Рассмотрим основные классификационные признаки для систем автоматического управления.

Рисунок 1 - Укрупненная классификация САУ по классам дифференциальных уравнений
По классам дифференциальных уравнений, которыми они описываются, различают САУ, приведенные на рисунке 1.
Линейными называют системы, которые могут быть отражены линейными операторными уравнениями (например, линейными дифференциальными уравнениями или системами этих уравнений); в противном случае система входит в класс нелинейных.
Линейные и нелинейные дискретные системы характеризуются соответственно линейными и нелинейными разностными уравнениями или их системами.
Линейные и нелинейные стационарные системы выражают дифференциальные уравнения или системы уравнений с постоянными коэффициентами.
Линейные и нелинейные нестационарные системы описываются дифференциальными уравнениями или системами уравнений с переменными коэффициентами.
Сосредоточенные системы, или системы с сосредоточенными параметрами, определяются обыкновенными дифференциальными уравнениями.
Распределенные системы, или системы с распределенными параметрами, описываются дифференциальными уравнениями в частных производных.
По принципу действия различают САУ:
по отклонению — принцип И. И. Ползунова (первая система управления уровнем воды в баке паровой машины была создана им в 1765 г.);
по возмущению — принцип Ж. Понселе (первая система управления по нагрузке на валу паровой машины была предложена им в 1830 г.);
комбинированные — объединяют принципы И. И. Ползунова и Ж. Понселе.
Структурная схема САУ по отклонению (рис. 2, а) аналогична схеме типовой промышленной САУ.
Решая конкретную задачу управления работой паровой машины, И. И. Ползунов и не предполагал, что его схемное решение будет использоваться через 200 лет в 80...90 % промышленных САУ.
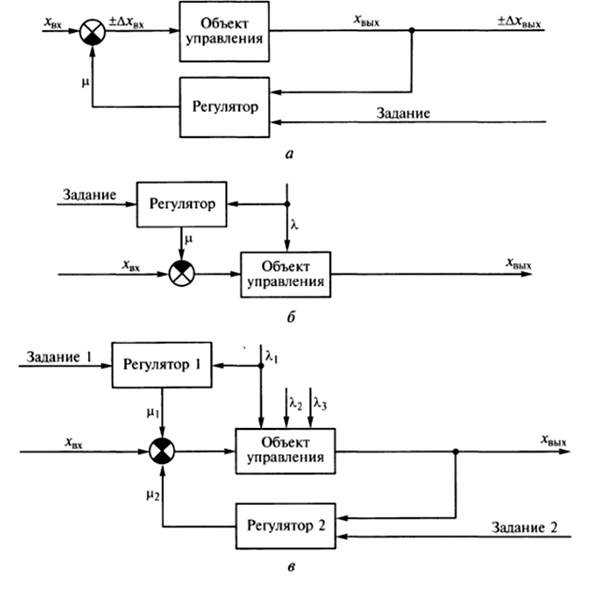
Рисунок 2 - Структурные схемы САУ: а — по отклонению; б — по возмущению; в — комбинированной
Достоинством САУ по отклонению является то, что она компенсирует влияние любого возмущающего воздействия, которое вызвало отклонение значения ее выходного сигнала (±Дхвых), изменением через цепь отрицательной ОС значения входного сигнала (±Дхвх) с помощью сигнала р, поступающего с регулятора.
Недостаток САУ по отклонению состоит в том, что отклонение выходного сигнала (например, вследствие нарушения технологического режима) должно сначала появиться и только после этого регулятор должен не только компенсировать возмущающее воздействие, но и свести к нулю отклонение от заданного значения регулируемого параметра хвь|Х. При использовании высокочувствительного датчика это отклонение может быть минимальным, но в принципе оно будет иметь место.
Структурная схема системы автоматического управления по возмущениюпредставлена на рисунке 2, б.
Иногда возмущающее воздействие (например, изменение температуры наружного воздуха) можно измерить, т.е. если X единственное возмущающее воздействие на объект (например, сигнал поверхностного теплообменника, установленного на открытой площадке), его измеряют и подают на регулятор для сравнения с заданным значением и выработки управляющего сигнала р, влияющего на значение входного сигнала.
При таком принципе управления изменение возмущающего воздействия компенсируется регулятором до того, как оно нарушит технологический режим работы объекта, что является главным достоинством этого типа САУ. Однако существенный недостаток таких систем — неспособность компенсировать влияние на объект других возмущающих воздействий, которых в современных сложных установках бывает несколько и которые иногда невозможно измерить. Поэтому в промышленности САУ по возмущению используются редко.
Программные САУ используются для управления периодическими процессами (металлообработкой, термообработкой изделий и др.). При этом способ задания программы может быть самый различный: от применения механического вращающегося кулачка до программы, записанной в микропроцессор.
В следящих САУ выходной сигнал задатчика заранее неизвестен, т.е. он может быть случайной величиной:
Такая ситуация возникает, когда следящая система является вторичной и отслеживает параметр, значение которого заранее неизвестно, например при необходимости подачи воздуха в определенном соотношении с расходом газа в топку котла. В этом случае расход газа меняется случайным образом под влиянием возмущающих воздействий, но система управления расходом воздуха должна выдерживать определенное их соотношение, т.е. следить за изменением расхода газа, который является для нее заданием.
Двухпозиционные САУ надежны, дешевы, но точность регулирования параметра в них мала.
Реже применяются трехпозиционные САУ, в которых выходной сигнал регулятора может принимать три значения: -1; 0; +1, или больше — норма — меньше. Качество работы трехпозиционных САУ выше, но надежность ниже.
В аналоговых САУ выходной сигнал регулятора непрерывно изменяется во времени, иногда по сложному закону в определенном диапазоне. В Государственной системе приборов (ГСП) эти диапазоны стандартизированы.
Диапазон выходных сигналов пневматических регуляторов составляет 0,02... 0,1 М Па.
Электрические регуляторы имеют несколько стандартных диапазонов: 0...5, 0...20, 4...20 мА; 0... 10 В и др.
В дальнейшем рассматриваются методика исследования и математический аппарат, используемый при разработке САУ непрерывного действия, действующие по принципу И. И. Ползунова, так как таких систем в промышленности большинство.
-
Способы построения САУ. Принцип Понселе, примеры. Принцип Ползунова-Уатта, примеры.
По принципу формирования управляющего воздействия, поступающего на управляющий орган объекта управления, все САУ делятся на системы:
1. Управление по разомкнутому циклу
2. Управление по замкнутому циклу
3. САУ с комбинированным управлением.
САУ разомкнутого типа способны удовлетворительно функционировать только при постоянстве характеристик объекта управления и в условиях низкого уровня помех, вызываемых влиянием окружающей среды. САУ замкнутого типа работают по принципу отрицательной обратной связи. В них реализуется измерение и контроль отклонения управляемой переменной Y от задающего воздействия X. Цель управления в таких системах состоит в устранении ошибки управления.
Общий алгоритм функционирования системы управления:
1. Определение (измерение) текущего состояния объекта управления;
2. Сравнение текущего и желаемого состояния объекта управления;
3. Определение требуемого воздействия (управления) и реализация воздействия на объект управления;
4. Обеспечение качества процесса устранения возникшего отклонения.
Разомкнутая система управления по возмущению (принцип компенсации возмущения Понселе).
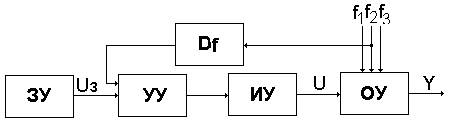
Так как причина отклонения У – возмущение f, то мы измеряем его с помощью датчика Df и в зависимости от величины возмущения формируем такое управляющее воздействие на ОУ, чтобы скомпенсировать влияние возмущения. Характерный признак – наличие двух каналов прохождения сигнала возмущения.
Достоинства: высокое быстродействие.
Недостатки: Для полной и точной компенсации необходимо иметь точную модель объекта по каналу возмущения и управления. Это дорого и с течением времени мат. модель все равно устаревает и становится неточной. Возмущений может быть несколько. Всех измерить сложно и дорого. В результате неточности компенсации основного возмущения и влияния неучтенных возмущений выходная величина будет отклоняться от заданного значения, но УУ об этом не знает.
Замкнутая система управления по отклонению (принцип Ползунова-Уатта).
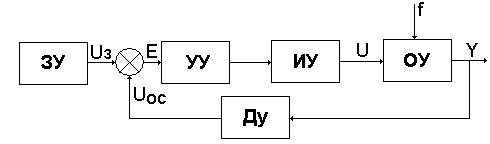
Управляющая величина У измеряется с помощью датчика Ду и сравнивается с заданным значением. Вычисляется ошибка управления e=Uз-Uoc. В зависимости от величины и знака ошибки e, устройство управления формирует управляющее воздействие на объект, стремясь уменьшить величину ошибки. (e®0) если e=0, то У=Uз. Характерный признак такой системы наличие отрицательной обратной связи (ООС)(общий вход-выход).
Достоинство: универсальность. УУ реагируетна любые отклонения независимо от причины.
Недостаток: внутреннее противоречие принципа (чтобы уменьшить ошибку, надо ее сначала допустить).
-
Основные элементы САУ. Задающее устройство, регулятор, обратные связи, усиливающее устройство, объект управления. Привести примеры.
Основными элементами САУ являются:
РУ- регулирующее устройство (регулятор). Оно предназначено для корректирования сигнала ошибки регулирования с целью улучшения качества процесса управления.
ЗУ- задающее устройство. Предназначено для функционирования сигнала задания Хз пропорционального технически заданному значению регулируемой величины Хрег.
ИМ- исполнительный механизм. Предназначен для преобразования выходного сигнала регулятора в механическое перемещение регулируемого органа.
РО- регулируемый орган. Устройство с помощью которого осуществляется изменение режима работы объекта управления, оно возникает на регулируемый параметр объекта управления путем изменения количества вещества или энергии поступающей в объект.
ЧЭ- чувствительный элемент. Предназначен для измерения регулируемой величины и преобразования её в сигнал управления другой природы более удобный для передачи последующим элементам САУ.
Кроме перечисленных элементов в состав САУ могут входить также усилители (для усиления сигнала по мощности или по уровню преобразования рода сигнала), функциональные блоки (для осуществления алгоритмических операций над сигналами).
Они могут быть конструктивно выполнены в виде отдельных элементов или входить в состав рассмотренных выше САУ.
Для непрерывных технологических процессов, в том числе в машиностроении выпускаются приборы и средства автоматики в виде унифицированных элементов и блоков на базе, которых могут создаваться системы управления любой сложности.
Пример САУ представлен на рисунке:
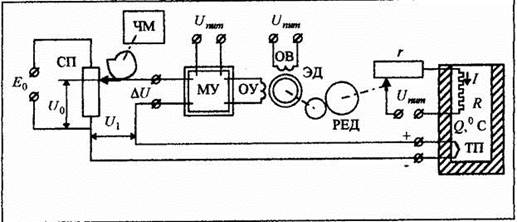
Где: СП- переменной сопротивление,
Км- кулачковый механизм,
ЧМ- часовой механизм,
МУ- магнитный усилитель,
ЭД- электродвигатель,
ОУ- обмотка управления,
ОВ- обмотка возбуждения
Ред- редуктор
r- реостат, с помощью которого изменяется сопротивление в цепи нагревателя.
Н- нагреватель,
ТП- термопара.
Объектом управления является электрическая печь, а регулируемой величиной температура в печи. В печь встроена термопара для измерения температуры. Электрический ток в цепи нагрева зависит от положения щетки реостата. Количество выделяемого тепла определяется по формуле:
Q=I2RT,
где R- сопротивление сигнала, I-ток.
Реверсивный электродвигатель через редуктор кинематически связан со щеткой реостата, напряжение изменяющее частоту и направление вращения электродвигатель получает от магнитного усилителя. Щетка потенциометра изменяет свое положение, а следовательно и напряжение U

