ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 19.07.2024
Просмотров: 345
Скачиваний: 2

СОДЕРЖАНИЕ
Глава 2. Первичные преобразователи
Глава 3. Усилители и стабилизаторы
Глава 4. Переключающие устройства и распределители
Глава 5. Задающие и исполнительные устройства
Глава 6. Общие сведения об измерении и контроле
Глава 8. Контроль давления и разрежения
Глава 9. Контроль расхода, количества и уровня
Глава 12. Автоматическая блокировка и защита в системах управления
Глава 13. Системы автоматического контроля и сигнализации
Глава 14. Системы автоматического
Глава 15. Объекты регулирования и их свойства
Глава 17. Конструкции и характеристики регуляторов
Глава 18. Общая характеристика
Глава 19. Математическое и программное обеспечение микроЭвм
Глава 20. Внешние устройства микроЭвм
Глава 21. Применение микропроцессорных систем
Глава 23. Конструкции промышленных роботов
Глава 25. Роботизация промышленного производства
Лабораторная работа 5. Экспериментальное определение динамических характеристик объектов регулирования
Содержание работы. Овладеть методами и навыками определения основных свойств объекта регулирования.
Описание лабораторной установки. В качестве объекта регулирования в работе рассматривается лабораторная электрическая печь сопротивления, а для записи кривой разгона используется самопишущий потенциометр ЭПП-09. В схеме лаборатор* ной установки для определения кривой разгона 'электрической печи (рис. 128) электронагреватели Н включены в сеть через резистор /<?/, рассчитанный на понижение напряжения с 220 В до 190 В. Печь 2 нагревается до установления постоянной температуры, которая фиксируется с помощью системы, состоящей йз термопары ТП (первичный преобразователь), подключенной к потенциометру 1. После стабилизации температуры дается выдержка
-
... 3 мин. Затем включается потенциометр и замыкается контакт ОБ. В результате напряжение на нагревательных элементах повышается примерно на 15 %. Это изменение напряжения соответствует скачкообразному изменению возмущения, которое будет
зафиксировано через резистор К2 потенциометром. Одновременно потенциометр ведет запись £ = f (т), т. е. кривую разгона объекта.
л
2>ГП
н
/
Р77%
VII
-и
п
X7/
-сэ-
ниях. Сначала контакт замыкается, а затем, после установления нового установившегося режима,
контакт <35 размыкается.
Рис.
128. Схема лабораторной установки для
построения кривых разгонв
Снимают кривые разгона. По кривым разгона методом касательных определяются следующие свойства
объекта: полное запаздывание тп, постоянная времени объекта Т, степень самовыравнивания р и скорость разгона е.
Содержание отчета. Отчет должен содержать принципиальную схему и описание установки, кривые разгона и основные свойства объекта регулирования, паспортные данные печи, термопары и потенциометра ЭПП-09. Отчет заканчивается выводами по работе.
Глава 16. Типы регуляторов
-
КЛАССИФИКАЦИЯ АВТОМАТИЧЕСКИХ РЕГУЛЯТОРОВ
Основная функция регулятора состоит в том, чтобы выявить отклонение регулируемой величины от заданного значения, усилить это отклонение и преобразовать в перемещение исполнительного механизма или в управляющий сигнал регулирующего органа. Иными словами, автоматический регулятор — это комплекс устройств, предназначенных для измерения регулируемой величины, сопоставления ее с заданной и оказания регулирующего воздействия на процесс для устранения выявленного отклонения. Каждую из перечисленных функций выполняет определенная часть регулятора, который состоит из следующих узлов: чувствительного (измерительного) элемента, управляющего устройства с задатчиком, исполнительного механизма и регулирующего органа.
В литейных и термических цехах для автоматизации различных технологических процессов используют множество регуляторов, различающихся разнообразными признаками и конструкцией. Наиболее целесообразно классифицировать регуляторы по таким признакам, которые отражают и их конструктивные осо
бенности. Эти классификации позволяют выявить также стороны регуляторов, которые трудно усмотреть в общей классификации, изложенной в гл. 1.
Регуляторы могут быть классифицированы по способу действия, по виду вспомогательной энергии и т. п.
Согласно первой классификации различают регуляторы прямого и косвенного (непрямого) действия. В регуляторах прямого действия измерительный элемент непосредственно воздействует на регулирующий орган. Эти регуляторы просты по устройству и надежны в работе, однако они обладают рядом недостатков: большая зона нечувствительности, малые пределы регулирования и невозможность дистанционного управления. В регуляторах косвенного действия регулирующий орган перемещается за счет энергии, получаемой от постороннего источника.
По виду вспомогательной энергии регуляторы косвенного действия подразделяются на гидравлические, пневматические, электрические и комбинированные. Гидравлические регуляторы обеспечивают плавное регулирование в широком диапазоне и создают большие усилия на регулирующий орган. Они надежны и удобны в эксплуатации, но имеют ограниченный радиус действия, определяемый длиной гидравлического трубопровода. Пневматические регуляторы обладают рядом положительных качеств, свойственных гидравлическим. Однако они сравнительно легко засоряются и поэтому требуют применения дополнительных воздушных фильтров. Характеристики пневматических регуляторов зависят от температуры и давления окружающей среды. Электрические регуляторы имеют практически неограниченный радиус действия, их работа мало зависит от температуры и давления окружающей среды. При конструировании комбинированных регуляторов стремятся использовать положительные характеристики каждого вида вспомогательной энергии.
По роду действия, т. е. по виду управляющего воздействия на регулирующий орган, различают регуляторы непрерывного и прерывистого (дискретного) действия. В регуляторах непрерывного действия регулирующий сигнал подается на исполнительный механизм непрерывно при наличии отклонения регулируемой величины от заданного значения. В регуляторах прерывистого (дискретного) действия регулирующий сигнал подается на исполнительный механизм через определенные интервалы времени. В паузах регулятор как бы оценивает произведенное им воздействие на регулируемый объект и формирует новый регулирующий сигнал с учетом произведенного воздействия.
По виду регулируемой величины различают регуляторы температуры, давления, расхода, уровня и т. д.
По конструктивному исполнению регуляторы могут быть приборными, аппаратными и агрегатными. Приборные регуляторы содержат измерительное устройство, которое одновременно выдает сигнал на измерительный прибор, регистрирующий значение контролируемой величины, и сигнал управления. К приборным регуляторам относятся электронные потенциометры, автоматические мосты, логометры и т. п.'В регуляторах аппаратного типа вырабатывается только управляющий сигнал. В состав таких регуляторов входят измерительный блок и электронное устройство, формирующие законы регулирования. В регуляторах агрегатного типа преобразовательно-усилительный блок сравнивает сигналы первичного преобразователя и задатчика и формирует выходной сигнал.
-
РЕГУЛЯТОРЫ ПРЕРЫВИСТОГО (ДИСКРЕТНОГО)
ДЕЙСТВИЯ
Регуляторы прерывистого действия подразделяются на позиционные, импульсные и цифровые.
Позиционными (релейными) называют регуляторы, у которых регулирующий орган может занимать определенное число положений. В литейных и термических цехах используются в основном двух- и трехпозиционные регуляторы.
В двухпозиционных регуляторах регулирующий орган может занимать только два положения: больше-меньше, включено- выключено или открыто-закрыто. Количество энергии или вещества, подводимое к объекту или отводимое от объекта при установке регулирующего органа в положение «больше», будет.превышать среднюю потребность, а в положении «меньше» будет ниже нее. Например, при регулировании температуры в электрической печи регулятор при значении регулируемой величины ниже заданного значения включает нагревательные элементы, а при превышении — выключает. Отклонения температуры от заданного значения оказывают влияние на длительность включения и выключения нагревательных элементов. При таком способе регулируемая величина колеблется относительно заданного значения.
Изменение мощности и регулируемой температуры во времени при двухпозиционном регулировании температуры печи показано на рис. 129. Величины и определяют возможные стабильные температуры печи, соответствующие длительному включению нагревательных элементов с мощностями N1 и соответственно. Значения мощностей выбраны таким образом, чтобы заданная температура 4ад находилась в интервале температур Ь и
Основные параметры такого процесса могут быть определены по приближенной формуле
т ^1 + ЛГ2 Т ’
где — отклонение температуры от заданного значения,°С;
209

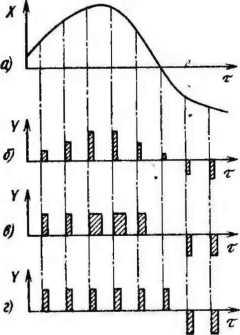 Рис.
129. Изменение при дпухпозйци- Рис. 130.
Графическое изображение онном
регулировании: действия импульсного
регулятора
Рис.
129. Изменение при дпухпозйци- Рис. 130.
Графическое изображение онном
регулировании: действия импульсного
регулятора
а — температуры; б — мощности
Л/, и Л/а — мощности нагревательных элементов, кВт; тц — время запаздывания, с; Г — постоянная времени объекта, с.
Как видно из формулы, колебания регулируемой температуры уменьшаются при уменьшении регулируемой мощности Л/]. — ЛГа, времени запаздывания тц и увеличении постоянной времени объекта Т.
Уменьшение регулируемой МОЩНОСТИ Ыг — Л* вызывает сближение температур 1Х и /2 до заданной температуры /аад.
В тех случаях, когда не требуется высокая точность регулирования, мощность Л/2 можно принимать равной нулю, а мощность N! — равной максимальной мощности, т. е. регулировать по принципу включено-выключено.
Колебание температуры снижается при уменьшении времени полного запаздывания тц. Здесь под запаздыванием понимается не только время запаздывания объекта, но и время запаздывания самого регулятора. Следовательно, колебания температуры могут быть уменьшены путем выбора регулятора с меньшим диапазоном нечувствительности 2Д/Н-
Колебание температуры уменьшается при увеличении постоянной времени объекта Т. Поэтому чем больше емкость объекта, тем благоприятнее осуществляется двухпозиционное регулирование.
Одним из основных недостатков двухпозиционного регулирования является невозможность сочетания быстрого нагрева (для этого необходима большая мощность) и высокой точности регулирования, для которой требуется небольшая избыточная мощность.

