ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 19.07.2024
Просмотров: 401
Скачиваний: 3

СОДЕРЖАНИЕ
Глава 2. Первичные преобразователи
Глава 3. Усилители и стабилизаторы
Глава 4. Переключающие устройства и распределители
Глава 5. Задающие и исполнительные устройства
Глава 6. Общие сведения об измерении и контроле
Глава 8. Контроль давления и разрежения
Глава 9. Контроль расхода, количества и уровня
Глава 12. Автоматическая блокировка и защита в системах управления
Глава 13. Системы автоматического контроля и сигнализации
Глава 14. Системы автоматического
Глава 15. Объекты регулирования и их свойства
Глава 17. Конструкции и характеристики регуляторов
Глава 18. Общая характеристика
Глава 19. Математическое и программное обеспечение микроЭвм
Глава 20. Внешние устройства микроЭвм
Глава 21. Применение микропроцессорных систем
Глава 23. Конструкции промышленных роботов
Глава 25. Роботизация промышленного производства
АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ, КОНТРОЛЬ И РЕГУЛИРОВАНИЕ
Глава 11. Системы автоматики
С ПРОГРАММНЫМ УПРАВЛЕНИЕМ
-
ОБЩИЕ ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ
Под управлением понимают совокупность действий, выработанных на основании определенной информации и направленных на поддержание или улучшение функционирования объекта в соответствии с заданной программой.
Система с программным управлением состоит из последовательно соединенных элементов. Задающее устройство в соответствии с установленным режимом технологического процесса (программой) посылает сигнал, соответствующий началу отсчета (процесса). Сигнал передается на управляющее устройство, в которое в общем случае входят усилительный, преобразующий и исполнительный элементы. Системы могут состоять из одной цепи последовательно соединенных элементов или из нескольких параллельных цепей, управляемых одним многопозиционным задающим программным устройством.
Системы автоматического программного управления классифицируют по степени централизации и по виду программоносителя.
По степени централизации эти системы можно разделить на централизованные, децентрализованные и смешанные.
В централизованных программных системах управления координация действий механизмов какого-либо автомата производится из командного центра и осуществляется по единой программе.
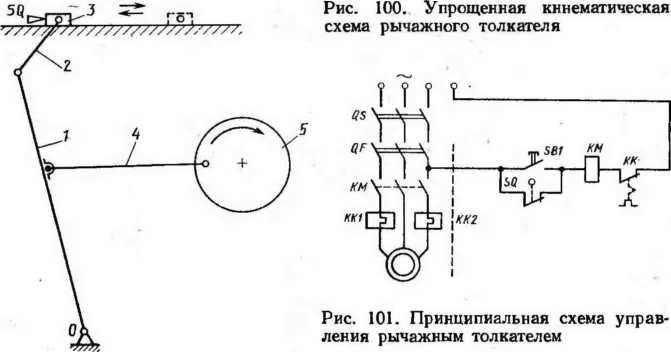
Наиболее часто встречающиеся централизованные системы управления имеют в своей основе командоаппараты, предназначенные для двухпозиционного управления (включение-выключение) по заданной программе. Программа определяет последовательность переключений и время их срабатывания, которое задается длительностью цикла т„ и циклограммой (рис. 97), показывающей относительное расположение моментов включения и выключения цепей в пределах одного цикла.
Централизованные системы осуществляют управление механизмами во времени, причем время одного оборота распределительного вала командоаппарата соответствует длительности одного цикла.
Существуют две разновидности схем централизованного программного управления: без контроля и с контролем выполнения команд. Первые проще в исполнении, однако вторые обеспечивают более высокую надежность в работе. Контроль выполнения команды обычно осуществляется с помощью путевого (конечного) выключателя, сигнал которого используется для остановки механизма.

1,0
X/Тц
0,5
Рис.
97. Циклограмма толкателя:
I
— рабочий ход; 2
— холостой ход
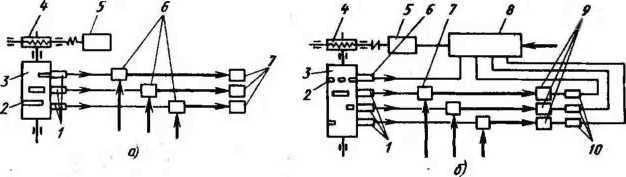
На рис. 98, б приведена схема централизованного программного управления с контролем выполнения команд. Барабан командоаппарата 3 поворачивается на угол, соответствующий интервалу времени между двумя следующими друг за другом командами. Это достигается с помощью особых кулачков 2 и путевого выключателя 6, воздействующего на магнитный пускатель 8 привода 5 командоаппарата, который вращает его барабан 3 через редуктор 4. Первая команда, полученная от управляющего контакта 1, поступает на магнитный пускатель 7 и привод механизма 9. Приведенный в движение механизм перемещает свой рабочий орган. В его предельном положении с помощью путевого переключателя 10 сигнал будет передан на магнитный пускатель 8, который включит двигатель командоаппарата, и т. д.
Системы централизованного управления имеют следующие недостатки: подача команд с центрального командоаппарата осуществляется вне зависимости от положения исполнительных
Рис.
98.
Структурные схемы централизованных
систем управления-
а
— без контроля результатов; б
— с контролем результатов
механизмов и без учета полного выполнения предыдущего цикла, в связи с чем возникает необходимость иметь дополнительные блокировочные устройства.
централизованной
программной системы управления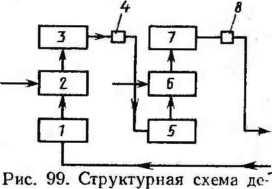
Децентрализованные программные системы управления не имеют командного центра, орган управления в них рассредоточен по механизмам и соединен между собой механической или электрической связью. Работа механизмов может быть функцией времени, пути или технологических параметров. При функционировании механизмов в зависимости от времени отсчет времени каждой операции осуществляется самостоятельным прибором (реле времени). Такая система отличается от централизованной с непрерывно вращающимся валом только тем, что длительности отдельных операций независимы и их можно быстро и просто изменять (при изменении технологических процессов) путем перестройки реле времени.
При функционировании механизмов в зависимости от пути подача каждой последующей команды осуществляется с помощью путевых выключателей, которые контролируют окончание перемещения рабочего органа механизма, участвующего в предыдущей операции.
В децентрализованных системах программного управления при действии механизмов в функции технологических параметров (температуры, давления, свойств и т. п.) используется зависимость различных физических свойств материалов обрабатываемых изделий от различных технологических факторов. Так, например, подача сигнала выгрузки формовочной смеси из бегунов или нагретых изделий из печи может быть осуществлена измерением электрических параметров или температуры.
Децентрализованные системы программного управления, в которых работа механизмов является функцией пути, широко распространены в литейных и термических цехах, так как они надежны в эксплуатации, просты по устройству и достаточно манев- ренны, если при переналадке оборудования меняется только время, но не меняется порядок движения рабочих органов. При изменении порядка движения рабочих органов требуется создание новой системы управления.
В схеме децентрализованной программной системы (рис. 99) реле времени 1 задает темп работы механизмов. Сигнал этого реле поступает на магнитный пускатель 2 электропривода механизма 3. После завершения работы этого механизма срабатывает путевой выключатель 4, который передает сигнал на реле времени 5 последующего механизма. Если второй механизм начинает свою работу сразу после окончания первой операции, то реле времени 5 может быть исключено, и тогда сигнал с путевого выключателя 4 непосредственно поступает на магнитный пускатель 6 электропривода механизма 7. Путевой выключатель 8 подает сигнал на реле времени последующего механизма. В рассмотренной системе сигнал передается последовательно от одного механизма к другому, причем сигнал от последнего механизма возвращается на реле времени 1. Таким образом, при децентрализованных системах управляющие функции поочередно выполняют механизмы — объекты управления, передавая друг другу замкнутую «эстафету управления» посредством входных и выходных сигналов. Здесь основную роль играют автономные и полностью независимые подсистемы управления отдельными механизмами.
Преимуществом этой системы управления является отсутствие блокировки (так как команды на начало работы подаются только после окончания предыдущей операции), а недостатком — то, что многочисленные первичные преобразователи, работающие в рабочей зоне, нередко выходят из строя вследствие попадания брызг жидкого металла, пыли и масла; кроме того, из-за закорачивания или обрыва электрических цепей могут подаваться неправильные команды.
Смешанные программные системы управления содержат ко- мандоаппарат, а также устройство параллельного контроля исполнения очередных команд. При нормальном протекании цикла вал командоаппарата вращается непрерывно, однако, если очередная команда не будет выполнена, то он останавливается. Несмотря на то, что смешанные системы обладают некоторыми недостатками двух систем, они имеют большие перспективы, как более гибкие и универсальные.
По виду программоносителя, т. е. устройства, содержащего законы движения управляемых механизмов, системы управления бывают: с распределительным валом (командоаппаратом); с упорами и копирами; с числовым программным управлением. В последней системе программа может быть записана на перфолентах, магнитных лентах, дисках и картах.
В настоящее время создана теория электрических схем, элементы которой будут изложены в последующих параграфах. Эта теория позволяет разрабатывать научные и практические приемы построения схем и их анализа и из множества вариантов схем выбирать наиболее оптимальный. Существуют два метода разработки схем управления: интуитивный и аналитический. При использовании как первого, так и второго за основу берется анализ работы механизма, схему управления которым необходимо разработать.
-
ИНТУИТИВНЫЙ МЕТОД РАЗРАБОТКИ СХЕМ УПРАВЛЕНИЯ
Интуитивный метод — метод разработки схем управления, основанный на опыте, накопленном в различных проектных организациях при автоматизации разнообразных механиз-
мов. Он базируется на инженерной интуиции проектанта. В совершенстве владеть этим методом может только тот, кто впитал в себя весь предыдущий опыт и имеет определенные способности в отношении составления схем, кто может абстрактно мыслить и логично рассуждать. Однако, несмотря на его сложность, большинство разработчиков схем широко использует интуитивный метод.