Файл: Курсовая работа студентки гр. 3717147 очной формы обучения Бабушкиной Валерии Викторовны.docx
Добавлен: 18.10.2024
Просмотров: 15
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
препятствия в поле видимости, следовательно, субъект может принять решение не вслепую. Это достигается путем построения пространственно-временного ВП динамической ситуации. Для выполнения этой задачи субъект, помимо отображения стационарной структуры арены в абстрактное ВП, должен также иметь возможность прогнозировать возможные положения препятствий и себя в (ментальном) будущем и предотвратить столкновения. (Villacorta-Atienza, Makarov, 2010)
А.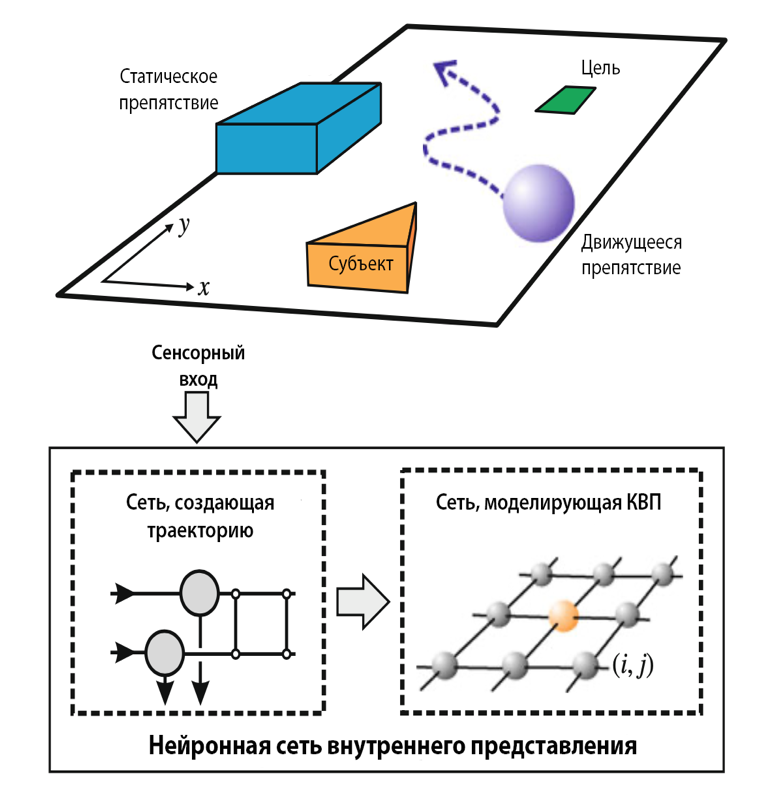 Б.
Б.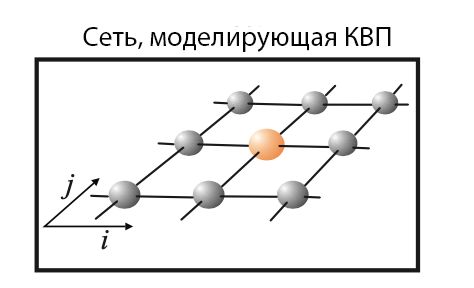

Рис. 8 А. Изображение арены, содержащей субъект, цель, статические и движущиеся препятствия. Субъект воспринимает все объекты на арене и создает внутреннее пространственно-временное представление себя и окружающей среды для достижения цели, избегая столкновений с препятствиями. Б. Архитектура нейронной сети, генерирующей КВП.
КВП создается, чтобы найти траекторию движения, которая приведет субъект к цели, минуя препятствия. Это достигается в сети, создающей КВП, которая представляет собой двумерную решетку локально связанных нейронов. Она изометрически отображает арену таким образом, что положение нейрона в решетке, описываемое парой индексов (i, j) соответствует фактическим (x, y) -координатам на арене (рис.8Б)
Появление КВП в нейронной сети можно рассматривать как результат виртуального исследования окружающей среды. Концепция заключается в том, что несколько идентичных виртуальных субъектов двигаются с начальной позиции субъекта (Рис.8Б оранжевая клетка) и выполняют случайный поиск в пространстве решетки, пока они полностью не исследуют «арену». Тогда распределение виртуальных субъектов в решетке сети определяет КВП и оптимальную стратегию.
ВП ориентированно на задачу с отражением среды и субъекта, и предлагает различные способы выполнения этой задачи. В исследовании рассмотрена проблема навигации: поиск путей к цели (например, самый короткий или самый безопасный). Создание компактного внутреннего представления в самом простейшем случае происходит в среде, где все элементы неподвижны.
От нейрона места, которому соответствует положение субъекта в начальный момент времени генерируется бегущая волна нейронной активности. При этом каждый нейрон «запоминает» время, когда он сгенерировал спайк. По градиенту этого времени строится траектория движения. Те нейроны, рецептивные поля которых находятся в зоне препятствий или целей затормаживаются и волна активности огибает их.
В следствии моделирования субъекта образуется множество кривых, соединяющих субъект и целевые местоположения. Таким образом, создается КВП, где субъект имеет свободу выбора среди нескольких альтернативных путей. На рисунке 8Б имеются плавные переходы между реальными препятствиями и пустыми участками. Это объясняет неопределенность в размерах и положениях препятствий. Исходя из этого, выбор пути может включать уровени безопасности, то есть например риск столкновения зависит от длины пути: чем короче путь, тем он менее безопаснее.
А.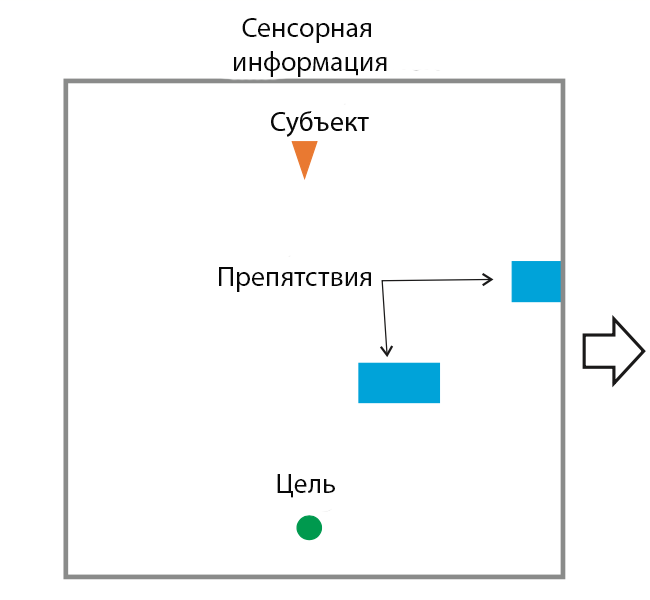 Б.
Б.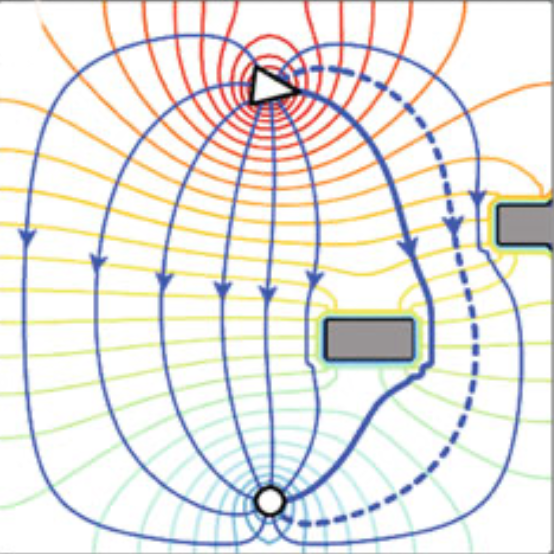
Рис.8 Компактное внутреннее представление статической среды. А. Арена, состоящая из агента (оранжевый треугольник), неподвижных препятствий (синие прямоугольники) и цели (зеленый круг). Б. Подход с нейронной сетью, генерирующей КВП, дает набор путей от начальной точки субъекта до цели. Субъект может свободно выбирать среди различных альтернатив, например, путем минимизации длины пути (сплошная жирная линия) или повышения безопасности (пунктирная линия).
В ситуации с динамическими ситуациями не может быть применен подход, описанный ранее.
На рисунке 9 представлена концепция с движущимся препятствием. Так же как и в ситуации со статическим препятствием от нейрона места, отвечающего за положение субъекта в начальный момент времени генерируется бегущая волна нейронной активности. Волновой фронт разделяет трехмерное пространство (2D-пространство + время) на два непересекающихся множества, соответствующих точкам в ментальном прошлом и будущем. Часть сети, где нейрон уже сгенерировал спайк, связана с “прошлым”, а остальная часть находится в “будущем” (рис. 9Б). Таким образом, все нейроны внутри области, ограниченной волновым фронтом, принадлежат “прошлому”, а те, что находятся за пределами этой области, принадлежат “будущему” (Villacorta-Atienza, Makarov, 2011).
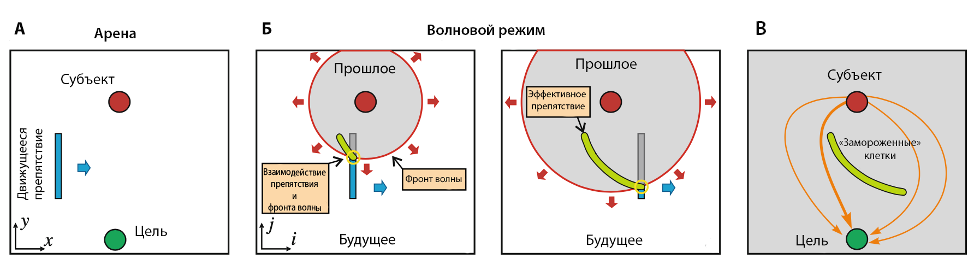

Рис. 9 КВП динамической ситуации. А. На арене находятся субъект (красный круг), цель (зеленый круг) и движущееся препятствие (голубой прямоугольник). Б. Образование волнового фронта, который отделяет прошлое (серая область) и будущее (белая область). “Замороженные” нейроны (зеленая зона) образуют эффективное препятствие. В. Формирование КВП и выбор траектории движения.

Ни одно из событий, произошедших перед волновым фронтом (“будущее”), не может повлиять на те, что находятся за ним (“прошлое”). Это ограничивает прогнозируемое движение препятствия пространством решетки спайковой сети за пределами волнового фронта (Рис. 9Б). Круговой фронт волны расширяется до тех пор пока не будет достигнуто препятствие. И происходит виртуальное столкновение субъекта с препятствием, которое в будущем следует избежать. Это пространственное местоположение, где может произойти столкновение, ограничивает набор тормозящих нейронов и возникает статическое эффективное препятствие (Рис.9Б – зеленая зона). Так как эти нейроны уже попали под фронт волны “прошлого”, то никакие новые события не смогут изменить их состояние и поэтому их динамику можно “заморозить” (Villacorta-Atienza, Makarov, 2010).
После того как сформировалось эффективное препятствие и волновой фронт полностью прошел, проблема ВП сводится к ситуации со статическим окружением и можно применить подход на рис.8. Тогда устойчивое состояние, для полученной уже статической ситуации, дает КВП динамической (рис.9В).
Таким образом, КВП динамических ситуаций получается в два этапа:
Внутреннее представление является предпосылкой когнитивного поведения, предлагая перспективы для принятия решений. Основной проблемой является понимание того как мозг дает компактное эффективное описание сложных, меняющихся во времени ситуаций, чтобы их в последствии сохранить в долговременной памяти.
Рассмотренные работы демонстрируют, что на данный момент существует достаточно широкий спектр подходов моделирования нейрональных когнитивных карт, определяющих поведение живых существ и решающих, в частности, задачу навигации в реальном времени. Изучение динамики активности и внутренней организации нейроморфных систем дает исследователям новую информацию о возможных механизмах функционирования мозга реальных организмов, позволяет на практике проверять некоторые биологические гипотезы, а также улучшать существующие алгоритмы машинного обучения и создавать новые.
Лукьянчиков А.И., Мельников А.О., Лукьянчиков О.И., Никольский А.Н. Алгоритмы классификации одноканального ЭМГ-сигнала для человеко-компьютерного взаимодействия // Cloud of science. 2018. №2.
Н.Н. Рукина, А.Н. Кузнецов, В.В. Борзиков, О.В. Комкова, А.Н. Белова Метод поверхностной электромиографии: роль и возможности при разработке экзоскелета (обзор) // Соврем. технол. мед.. 2016. №2.
А.
Б. Рис. 8 А. Изображение арены, содержащей субъект, цель, статические и движущиеся препятствия. Субъект воспринимает все объекты на арене и создает внутреннее пространственно-временное представление себя и окружающей среды для достижения цели, избегая столкновений с препятствиями. Б. Архитектура нейронной сети, генерирующей КВП.
КВП создается, чтобы найти траекторию движения, которая приведет субъект к цели, минуя препятствия. Это достигается в сети, создающей КВП, которая представляет собой двумерную решетку локально связанных нейронов. Она изометрически отображает арену таким образом, что положение нейрона в решетке, описываемое парой индексов (i, j) соответствует фактическим (x, y) -координатам на арене (рис.8Б)
Появление КВП в нейронной сети можно рассматривать как результат виртуального исследования окружающей среды. Концепция заключается в том, что несколько идентичных виртуальных субъектов двигаются с начальной позиции субъекта (Рис.8Б оранжевая клетка) и выполняют случайный поиск в пространстве решетки, пока они полностью не исследуют «арену». Тогда распределение виртуальных субъектов в решетке сети определяет КВП и оптимальную стратегию.
3.1 Статические препятствия
ВП ориентированно на задачу с отражением среды и субъекта, и предлагает различные способы выполнения этой задачи. В исследовании рассмотрена проблема навигации: поиск путей к цели (например, самый короткий или самый безопасный). Создание компактного внутреннего представления в самом простейшем случае происходит в среде, где все элементы неподвижны.
От нейрона места, которому соответствует положение субъекта в начальный момент времени генерируется бегущая волна нейронной активности. При этом каждый нейрон «запоминает» время, когда он сгенерировал спайк. По градиенту этого времени строится траектория движения. Те нейроны, рецептивные поля которых находятся в зоне препятствий или целей затормаживаются и волна активности огибает их.
В следствии моделирования субъекта образуется множество кривых, соединяющих субъект и целевые местоположения. Таким образом, создается КВП, где субъект имеет свободу выбора среди нескольких альтернативных путей. На рисунке 8Б имеются плавные переходы между реальными препятствиями и пустыми участками. Это объясняет неопределенность в размерах и положениях препятствий. Исходя из этого, выбор пути может включать уровени безопасности, то есть например риск столкновения зависит от длины пути: чем короче путь, тем он менее безопаснее.
А.
Б. Рис.8 Компактное внутреннее представление статической среды. А. Арена, состоящая из агента (оранжевый треугольник), неподвижных препятствий (синие прямоугольники) и цели (зеленый круг). Б. Подход с нейронной сетью, генерирующей КВП, дает набор путей от начальной точки субъекта до цели. Субъект может свободно выбирать среди различных альтернатив, например, путем минимизации длины пути (сплошная жирная линия) или повышения безопасности (пунктирная линия).
3.2 Динамические препятствия
В ситуации с динамическими ситуациями не может быть применен подход, описанный ранее.
На рисунке 9 представлена концепция с движущимся препятствием. Так же как и в ситуации со статическим препятствием от нейрона места, отвечающего за положение субъекта в начальный момент времени генерируется бегущая волна нейронной активности. Волновой фронт разделяет трехмерное пространство (2D-пространство + время) на два непересекающихся множества, соответствующих точкам в ментальном прошлом и будущем. Часть сети, где нейрон уже сгенерировал спайк, связана с “прошлым”, а остальная часть находится в “будущем” (рис. 9Б). Таким образом, все нейроны внутри области, ограниченной волновым фронтом, принадлежат “прошлому”, а те, что находятся за пределами этой области, принадлежат “будущему” (Villacorta-Atienza, Makarov, 2011).
Рис. 9 КВП динамической ситуации. А. На арене находятся субъект (красный круг), цель (зеленый круг) и движущееся препятствие (голубой прямоугольник). Б. Образование волнового фронта, который отделяет прошлое (серая область) и будущее (белая область). “Замороженные” нейроны (зеленая зона) образуют эффективное препятствие. В. Формирование КВП и выбор траектории движения.
Ни одно из событий, произошедших перед волновым фронтом (“будущее”), не может повлиять на те, что находятся за ним (“прошлое”). Это ограничивает прогнозируемое движение препятствия пространством решетки спайковой сети за пределами волнового фронта (Рис. 9Б). Круговой фронт волны расширяется до тех пор пока не будет достигнуто препятствие. И происходит виртуальное столкновение субъекта с препятствием, которое в будущем следует избежать. Это пространственное местоположение, где может произойти столкновение, ограничивает набор тормозящих нейронов и возникает статическое эффективное препятствие (Рис.9Б – зеленая зона). Так как эти нейроны уже попали под фронт волны “прошлого”, то никакие новые события не смогут изменить их состояние и поэтому их динамику можно “заморозить” (Villacorta-Atienza, Makarov, 2010).
После того как сформировалось эффективное препятствие и волновой фронт полностью прошел, проблема ВП сводится к ситуации со статическим окружением и можно применить подход на рис.8. Тогда устойчивое состояние, для полученной уже статической ситуации, дает КВП динамической (рис.9В).
Таким образом, КВП динамических ситуаций получается в два этапа:
-
Этап распространения волнового фронта, отделяющего “прошлое” и “будущее”. Происходит формирование эффективного препятствия -
Происходит формирование КВП.
Внутреннее представление является предпосылкой когнитивного поведения, предлагая перспективы для принятия решений. Основной проблемой является понимание того как мозг дает компактное эффективное описание сложных, меняющихся во времени ситуаций, чтобы их в последствии сохранить в долговременной памяти.
Заключение
Рассмотренные работы демонстрируют, что на данный момент существует достаточно широкий спектр подходов моделирования нейрональных когнитивных карт, определяющих поведение живых существ и решающих, в частности, задачу навигации в реальном времени. Изучение динамики активности и внутренней организации нейроморфных систем дает исследователям новую информацию о возможных механизмах функционирования мозга реальных организмов, позволяет на практике проверять некоторые биологические гипотезы, а также улучшать существующие алгоритмы машинного обучения и создавать новые.
Список литературы
-
А. Зорина, И. И. Полетаева. Зоопсихология. Элементарное мышление животных: Учебное пособие / — М.: Аспект Пресс.- 320 с.. 2002 -
Иптышев А.М., Горина Я.В., и др. Сравнение тестов «Восьмирукавный радиальный лабириант» и «Водный лабиринт Морриса» при оценке пространственной памяти у экспериментальных животных в ходе нейроповеденческого тестирования. Фундаментальная и клиническая медицина. 2017;2(2):62-69 -
Казанович Я. Б., Мысин И. Е. Как животные ориентируются в пространстве? Клетки места и клетки решетки. Статья из журнала «Математическая биология и биоинформатика» Том 10, Выпуск 1, 2015 -
Макаров В.А. Компактное внутреннее представление когнитивных процессов. В кн.: Нелинейная динамика в когнитивных исследованиях, Нижний Новгород, 2015: материалы. Нижний Новгород: ИПФ РАН,2015. С. 143. -
Худяков А.И. Экспериментальная психология в схемах и комментариях. – СПб.: Питер, 2008. – 297 стр. -
Behrens TE, et al. What is a cognitive map? organizing knowledge for flexible behavior. Neuron. 2018; 490–509. -
Cheung, Allen. “Probabilistic Learning by Rodent Grid Cells.” PLoS computational biology,2016 -
Collett. TS (1987) The use of visual landmarks by gerbils: reaching a goal when landmarks are displaced.J Comp Physiol [A] 160:109–113 -
Edelman G. M. (2007). Learning in and from brain-based devices. Science 318, 1103–1105 -
Ekstrom AD, Huffman DJ, Starrett M. Interacting networks of brain regions underlie human spatial navigation: a review and novel synthesis of the literature. J Neurophysiol. 2017 -
Gallistel C (1993). The Organization of Learning. MIT Press, Cambridge, MA, USA -
Giocomo LM. Environmental boundaries as a mechanism for correcting and anchoring spatial maps. The Journal of Physiology. 2016 -
Krichmar J.L., Seth A.K., Nitz D.A., Fleischer J.G., Edelman G.M. Spatial navigation and causal analysis in a brain-based device modeling cortical hippocampal interactions. Neuroinformatics. 2005. V. 3. P. 197–221. -
Kropff E, Carmichael JE, Moser MB & Moser EI (2015). Speed cells in the medial entorhinal cortex. Nature 523, 419–424 -
Madl T, Franklin S, Chen K, Trappl R, Montaldi D. Exploring the Structure of Spatial Representations. PLoS One. 2016. -
Makarov V.A. and Villacorta-Atienza J.A. “Compact internal representation as a functional basis for protocognitive exploration of dynamic environments”, In Recurrent Neural Networks for Temporal Data Processing (Eds.: H. Cardot, INTECH), pp. 81-102, 2011 -
Mcnaughton, Bruce & Battaglia, F & Jensen, Ole & Moser, Edvard & Moser, May-Britt. (2006). Path integration and the neural basis of the'cognitive map'. Nature Reviews Neuroscience. 7. 663-678 -
Morris RGM. (1981) Spatial localization does not require the presence of local cues. Learning and Motivation 12(2): 239–261 -
O’Keefe J, Dostrovsky J. 1971. The hippocampus as a spatial map. Preliminary evidence from unit activity in the freely-moving rat. Brain Research 34(1): 171–175 -
O’Keefe J, Nadel L. The hippocampus as a cognitive map. Oxford: Clarendon Press; 1978. -
Olton DS, Samuelson RJ. 1976. Remembrance of places passed: Spatial memory in rats. Journal of Experimental Psychology: Animal Behavior Processes 2(2): 97–116 -
Ponulak F., Hopfield J.J. Rapid, parallel path planning by propagating wavefronts of spiking neural activity. Front. Comput. Neurosci. 2013. V. 7. Article No. e98. -
Poucet B. Spatial cognitive maps in animals: new hypotheses on their structure and neural mechanisms. Psychol Rev. 1993; 100 :163–182 -
Poucet, B., Thinus-Blanc, C., & Chapuis, N. 1983. Route-planning in cats in relation to the visibility of the goal. Animal Behaviour, 94-599. -
Samsonovich A, and McNaughton BL (1997). Path integration and cognitive mapping in a continuous attractor neural network model. J. Neurosci 17, 5900–5920. -
Schiller D, Eichenbaum H, Buffalo EA, Davachi L, Foster DJ, Leutgeb S, Ranganath C. Memory and space: towards an understanding of the cognitive map. J Neurosci. 2015;35(41):13904–13911 -
Solstad T, Boccara CN, Kropff E, Moser MB & Moser EI (2008). Representation of geometric borders in the entorhinal cortex. Science 322, 1865–1868 -
Tolman EC. 1948. Cognitive maps in rats and men. Psychological Review 55(4): 189–208 -
Tommasi L & Thinus‐Blanc C (2004). Generalization in place learning and geometry knowledge in rats. Learn Mem 11, 153–161 -
Villacorta-Atienza J.A. and Makarov V.A. “Neural network architecture for cognitive navigation in dynamic environments”, IEEE Transactions on Neural Networks and Learning Systems 24(12), 2075 - 2087, 2013 -
Villacorta-Atienza J.A., Velarde M.G., and Makarov V.A. “Compact internal representation of dynamic situations: Neural network implementing the causality principle”, Biological Cybernetics 103, 285-297, 2010
Лукьянчиков А.И., Мельников А.О., Лукьянчиков О.И., Никольский А.Н. Алгоритмы классификации одноканального ЭМГ-сигнала для человеко-компьютерного взаимодействия // Cloud of science. 2018. №2.
Н.Н. Рукина, А.Н. Кузнецов, В.В. Борзиков, О.В. Комкова, А.Н. Белова Метод поверхностной электромиографии: роль и возможности при разработке экзоскелета (обзор) // Соврем. технол. мед.. 2016. №2.