Файл: Автоматизированный расчет настроечных коэффициентов регулятора средствами simulink содержание.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 06.05.2024
Просмотров: 20
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Автоматизированный расчет настроечных коэффициентов регулятора средствами SIMULINK
Содержание
Задание 3
Ход работы 4
Список литературы 12
Задание
Модель исследуемой системы из стандартных блоков представлена на рис. 1.
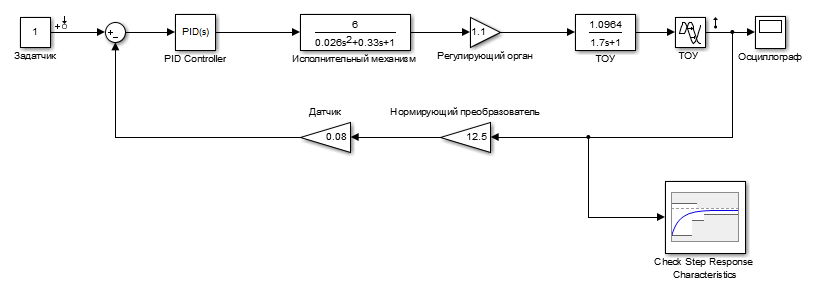
Рис. 1 – Схема АСР для определения оптимальных параметров настройки ПИД – регулятора
В схеме системы автоматического регулирования, представленной на рис. 1 заменить передаточную функцию ТОУ в соответствии со своим вариантом.
Таблица 1
Исходные данные
| № варианта | Передаточная функция ТОУ |
| 6 |  |
1. Выполнить работу для своего варианта в соответствии с описанной методикой.
2. Представить в отчете скрины окон из Матлаба, по которым требуется оценить качество регулирования текущей САР и после настройки регулятора.
3. Требованием к синтезируемым САР: обеспечение устойчивости, улучшение времени переходного процесса на 10%, обеспечение запасов устойчивости по фазе и амплитуде не менее регламентированных в теории.
Ход работы
Создаём модель исследуемой системы из стандартных блоков (рис. 2).
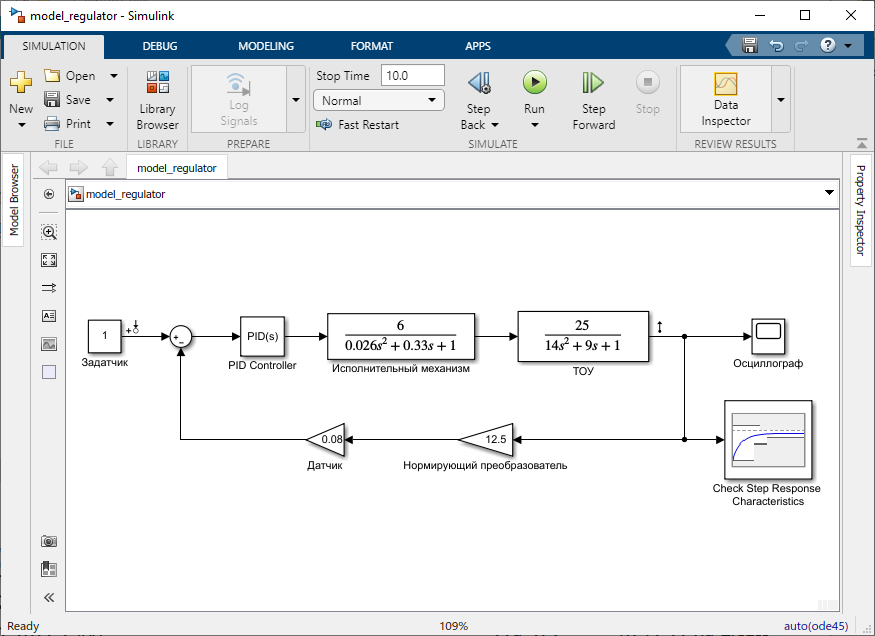
Рис. 2 – Модель АСР для определения оптимальных параметров настройки ПИД – регулятора
Вызываем окно блока оптимизации Check Step Response Characteristics, задаем необходимые параметры, подлежащие автоматической настройке (рис. 3):
-
время переходного процесса (Setting time) уменьшить до 3 с; -
перерегулирование (Overshoot) менее 10%; -
установившееся значение выходной величины (Final value) 1; -
время нарастания уменьшить до 2 с.
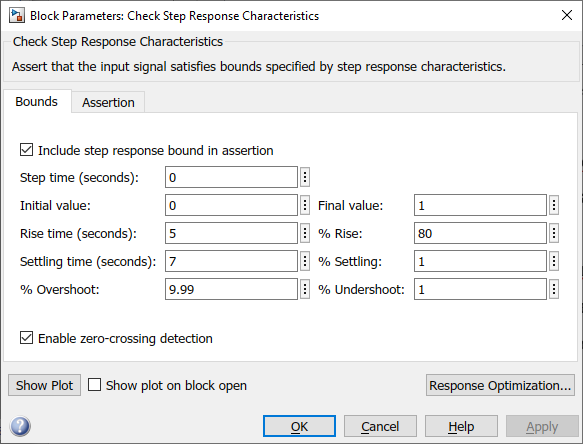
Рис. 3 – Окно Check Step Response Characteristics
Кнопка Show Plot блока Check Step Response Characteristics вызывает допустимый коридор изменения выходного сигнала (рис. 4) в соответствии с установленными значениями показателей качества управления.
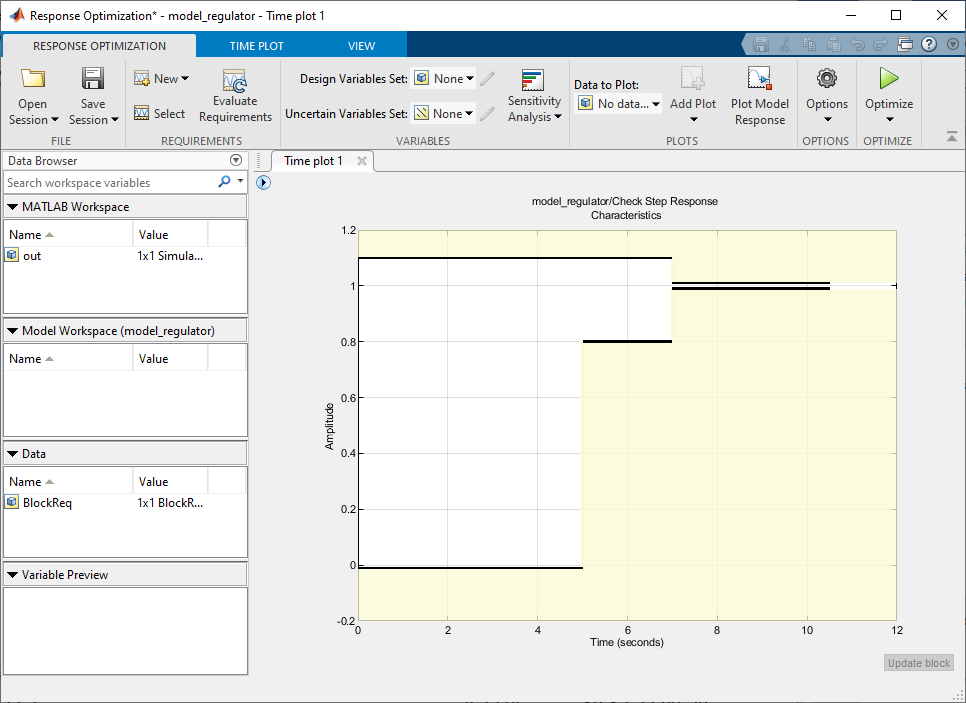
Рис. 4 – Коридор параметров оптимизации
На структурной схеме АСР открываем окно настройки ПИД-регулятора и вводим символьные переменные Kp, Ki и Kd (рис. 5).
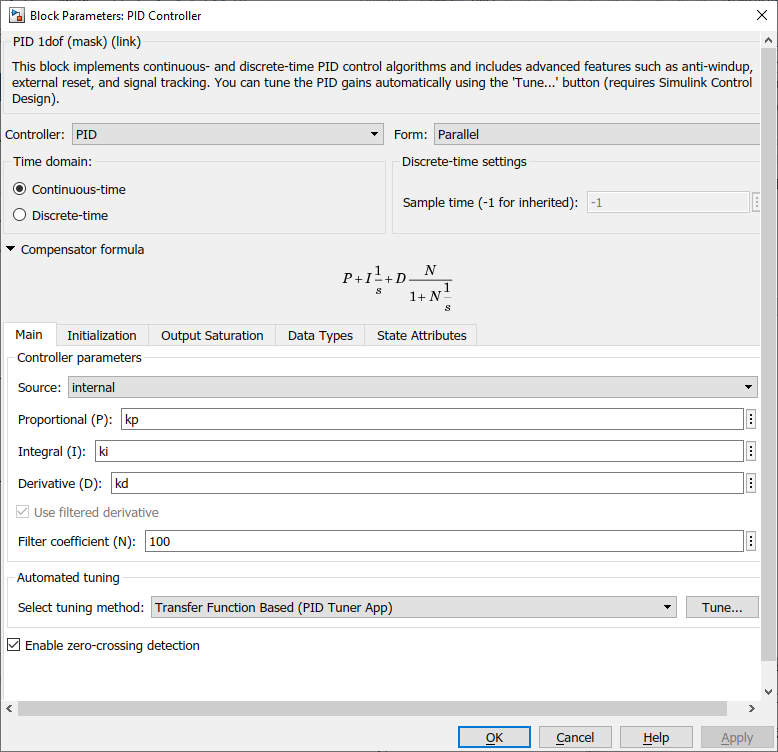
Рис. 5 – Ввод символьных имен коэффициентов PID регулятора, подлежащих автоматической настройке
В рабочем пространстве MATLAB указываем либо начальные значения настроечных коэффициентов (рис. 6).
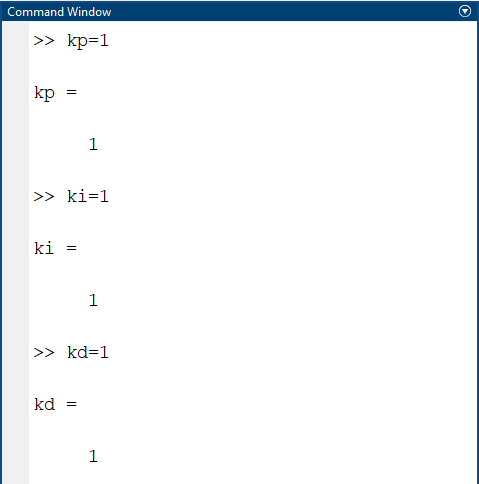
Рис. 6 – Ввод начальных значений коэффициентов в рабочем окне Matlab
Далее переходим на вкладку Response Optimization, открыв окно Design Response Optimization из меню Sink Block Parameters: Check Step Response Characteristics. Поочередно импортируем данные из Used By, выделяя их и перемещая в набор переменных для оптимизации Create Design Variables set, с помощью кнопки «стрелка» (рис. 5).
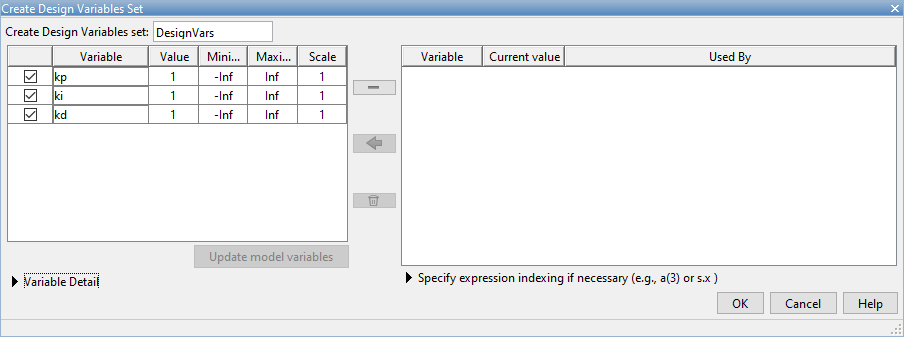
Рис. 7 – Ввод символьных имен коэффициентов, подлежащих автоматической настройке
По нажатию кнопки Optimize запускается процесс оптимизации. В случае, если вычислительный процесс сходится, т.е. система в соответствии с установленными показателями качества вычислила значения Kp, Ki и Kd , на экран выводится график переходного процесса в форме «коробочки Солодовникова» (рис. 8).
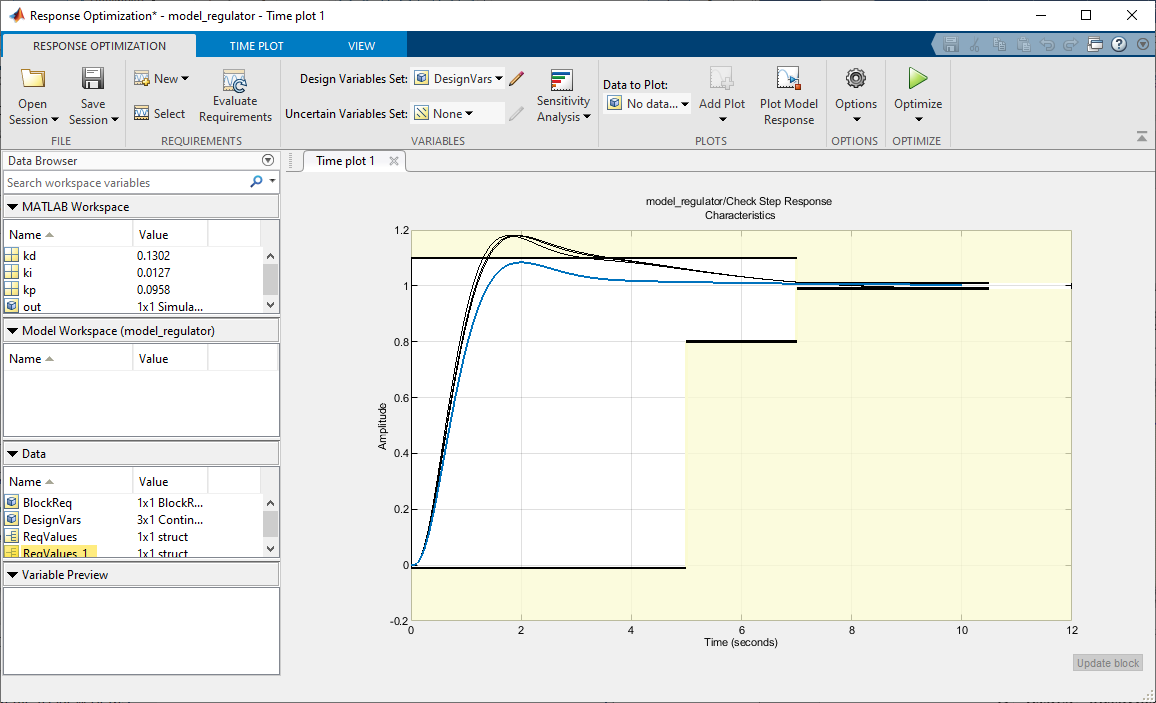
Рис. 8 – График после оптимизации значений Kp, Ki и Kd
В итоге автоматического расчета в пакете Check Step Response Characteristics оптимальные значения коэффициентов ПИД-регулятора (рис. 8) составили: Kp=0,0958, Ki=0,0127 и Kd=0,1302.
Для проверки полученных результатов синтеза регулятора системы автоматического регулирования давления в ресивере построим график переходного процесса (рис. 9) и определим значения показателей качества, введя значения настроек каналов регулятора.
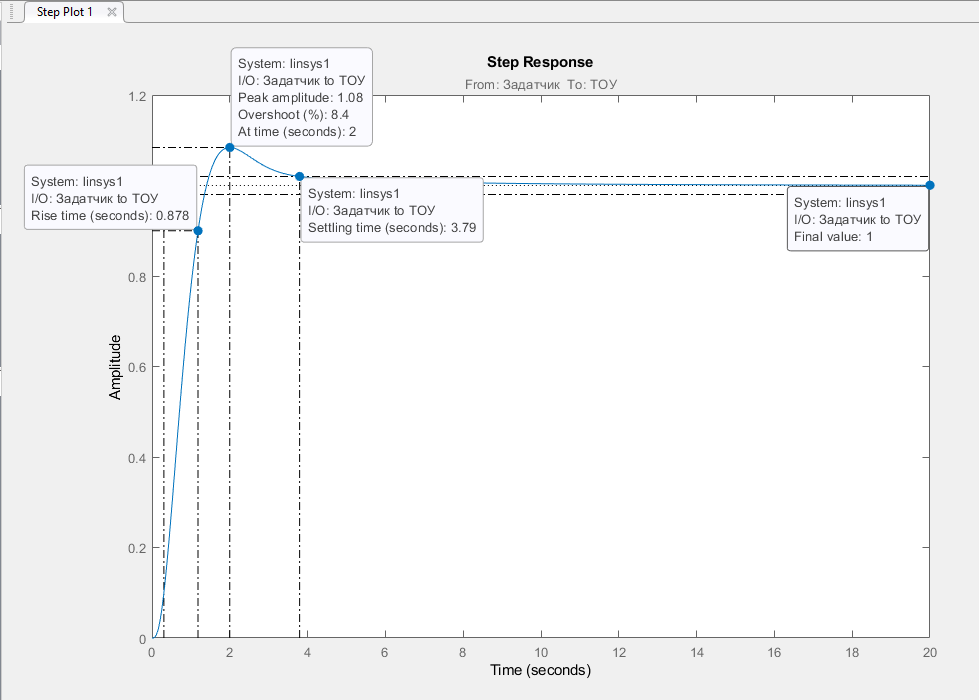

Рис. 9 – Переходная характеристика АСР с настроенным ПИД-регулятором
Характеристики модели АСР с оптимальными значениями настроек ПИД-регулятором при подаче на вход единичной ступенчатой функции:
- время нарастания (Rise time) – 0,878 с.;
-
время переходного процесса (Setting time): 3,79 с.; -
установившееся значение выходной величины (Final value): 1; -
ошибка регулирования Εст = 1 − 1 = 0; -
перерегулирование (Overshoot) составляет: 8,4%.
Для разомкнутой системы строим частотные характеристики: ЛАХ, ЛФХ (рис. 10) и АФХ (рис. 11).
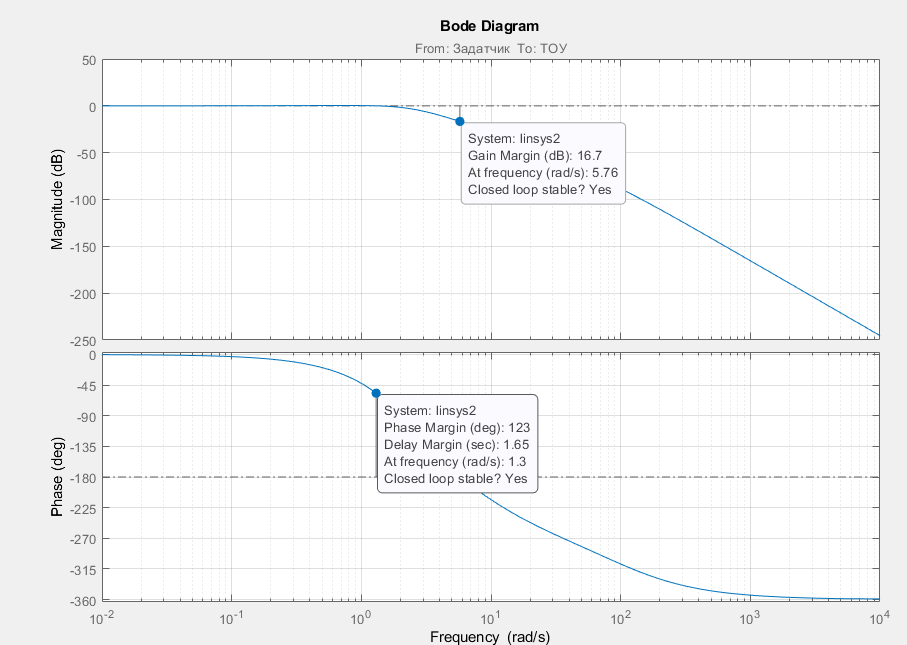
Рис. 10 – ЛАХ и ЛФХ характеристики АСР с настроенными значениями каналов ПИД-регулятора
Автоматически система определяет значения запасов устойчивости:
-
по амплитуде (Gain Margin): 16,7 дБ; -
по фазе (Phase Margin): 123.
Построим амплитудно-фазовые характеристики (АФХ) (рисунок 11).
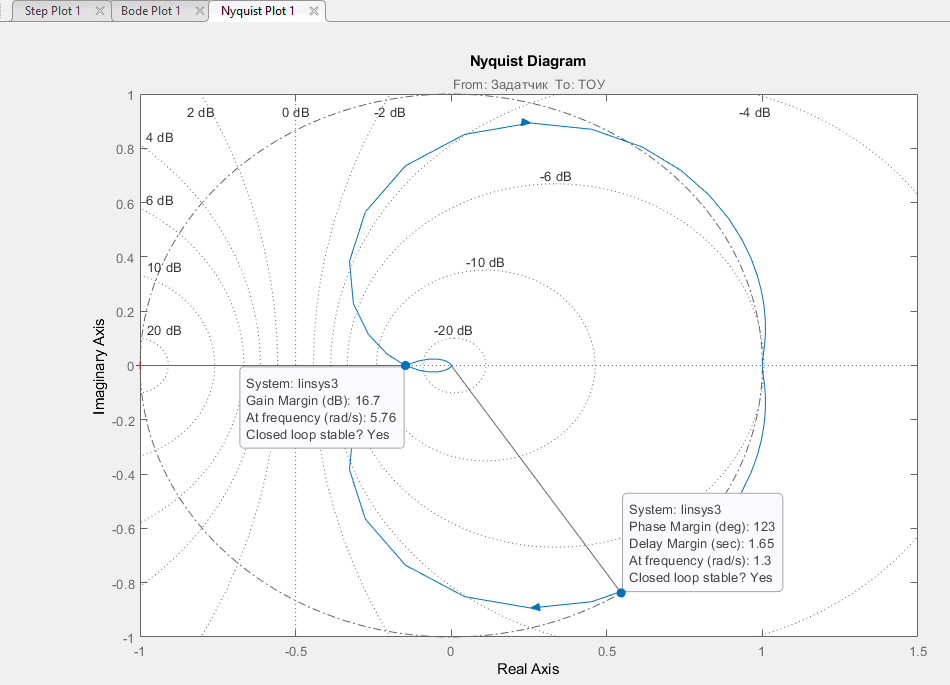
Рис. 11 – АФХ характеристики АСР с настроенными значениями каналов ПИД-регулятора
Список литературы
-
Методические указания по выполнению практической работы «Автоматизированный расчет настроечных коэффициентов регулятора средствами SIMULINK». -
Справочная система программы Matlab.