Файл: Курсовой проект по курсу Проектирование цифровых вычислительных (у правляющих) устройств.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 17.03.2024
Просмотров: 75
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
Из ряда Е96 выберем ближайшие значения:
R2 = 5.11 кОм; R3 = 95.3 кОм.
Проверим параметры разработанного НУ. Подставляя выбранные номиналы резисторов в (2.3), вычислим фактические значения коэффициентов KВХ и KСМ:
KВХ_Ф ≈ 0.85700426 ; KСМ_Ф ≈ 0.04549463 .
Из выражений (2.1) получим фактические минимальное и максимальное значения сигнала на выходе НУ:
UВЫХ_MIN_Ф = 0
 0.85700426 +3.3 0.04549463 ≈ 0.150132 В;
0.85700426 +3.3 0.04549463 ≈ 0.150132 В;UВЫХ_MAX_Ф = 3.5
0.85700426 + 3.3 0.04549463 ≈ 3,1496 В.Полученные значения входят в допустимый диапазон 0.1…3.2 В и незначительно отличаются от исходных UВЫХ_MIN и UВЫХ_MAX.
Для нормальной работы ОУ необходимо, чтобы напряжение на его прямом входе не превышало напряжение питания 3.3 В. Кроме того, из выражений (2.4) следует, что сумма коэффициентов KД_ВХ и KД_СМ должна быть меньше единицы. Поэтому при невыполнении хотя бы одного из условий UMAX×KД_ВХ+UСМ×KД_СМ ≤ 3.3 В, KД_ВХ + KД_СМ < 1 нужно увеличить коэффициент усиления KУ путём уменьшения R4 или увеличения R5, а затем повторить расчёт.
Проверка выполнения условий:
1) 3.5
0.6433 + 3.3 0.03415 ≤ 3.3В2.36424 ≤ 3.3В, Условие выполняется;
2) 0.6433 + 0.03415 < 1
0.6774 < 1, Условие выполняется.
-
Подсистема ввода дискретных сигналов
Многоразрядные порты ввода-вывода входят в состав выбранного ОМК, поэтому для ввода дискретных сигналов требуется только согласовать их электрические параметры с параметрами входов контроллера.
Согласно [2] логические входы ОМК при напряжении питания 3.3 В имеют следующие характеристики:
– напряжение логического «0», VIL.............................................0 В ≤VIL≤ 1.15 В
– напряжение логической «1», VIH
.......................................... 2.15 В ≤VIH≤ 3.3 В
– входной ток утечки, ILKG...........................................................................± 1 мкА
– входное сопротивление
при включённом подтягивающем резисторе, кОм...................................... 40
при отключённом подтягивающем резисторе, МОм, не менее ................ 3.3
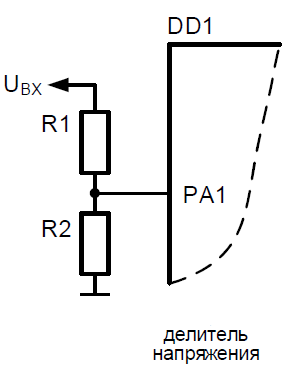
Рисунок 2.4 Подключение дискретного входа
Для подключения потенциального сигнала «0…24 В» необходимо уменьшить его напряжение до уровня логической «1» VIHОМК. Примем средний уровень VIHравным (2.15 + 3.3) / 2, то есть примерно 2.7 В. Тогда напряжение входного сигнала следует уменьшить в 24 / 2.7 = 8.9 раза. Это можно сделать с помощью делителя напряжения R1, R2, показанного на рис. 2.4. Для снижения тепловыделения и предотвращения перегрузки источника входного сигнала номиналы R1 и R2 следует выбирать достаточно большими, однако при этом нужно помнить, что увеличение R2 может привести к тому, что падение напряжения на нём, вызванное током утечки входа, превысит уровень логического «0».
Рассчитаем номиналы R1, R2 для выбранного коэффициента деления KД = 8.9. При этом будем считать, что встроенный подтягивающий резистор на входе ОМК отключён, а выходное сопротивление источника сигнала достаточно мало и им можно пренебречь.
KД = (R1 + R2 || RВХ) / (R2 || RВХ),
где RВХ – входное сопротивление вывода ОМК (3.3 МОм);
R2 || RВХ – общее сопротивление параллельно включённых R2 и RВХ.
Тогда R2 || RВХ = R1 / (KД – 1) или R2 × RВХ / (R2 + RВХ) = R1 / (KД – 1).
Отсюда получим:
R1 = R2 × RВХ × (KД – 1) / (R2 + RВХ). (2.5)
Выберем R2 равным 51 кОм. Падение напряжения на R2 при токе утечки входа 1 мкА составит 0.05 В, что соответствует уровню логического «0» VILс большим запасом. Подставляя значения R2, RВХ и KД в выражение (2.5) получим:
R1= 51000×3.3×
 ×(8.9 - 1) / ( 51000 + 3.3× ) ≈ 396768.12892 Ом ≈ 397 кОм
×(8.9 - 1) / ( 51000 + 3.3× ) ≈ 396768.12892 Ом ≈ 397 кОмВыберем ближайшее значение из ряда Е24, равное 390 кОм.
-
Подсистема вывода дискретных сигналов
Выбранный ОМК имеет в своём составе порты вывода с необходимым количеством линий, поэтому разработать требуется только узлы согласования. Для выходов с открытым коллектором узел согласования представлен на рис. 2.5.

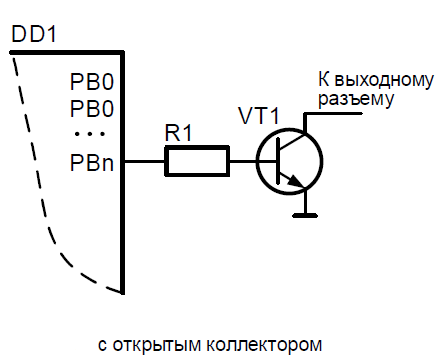
Рисунок 2.5 Подключение дискретного выхода
При его разработке прежде всего выбираются транзисторы с допустимым током коллектора IK не менее 300мАи напряжением «коллектор-эмиттер» VКЭ не менее 11В. Из этой группы отбираются такие, минимальный коэффициент передачи тока hFEкоторых позволит обеспечить требуемый выходной ток IDOпри токе базы порядка сотен микроампер – единиц миллиампер.
Исходя из этих условий выбираем биполярный n-p-n транзистор КТ645Б [5] с типом корпуса КТ-26, у которого ток коллектора Iк = 300 мА, напряжение коллектор-эмиттер Uкэ = 40 В, статический коэффициент передачи тока hFE = 80, напряжение база-эмиттер VБЭ = 1.2 В.
Рассчитывается необходимый ток базы. Его минимальную величину IБ_МИН можно получить из выражения:
IБ_МИН = IDO / hFE
IБ_МИН = (300 мА / 80) = 3,75 мА
Для стабильной работы транзистора в ключевом режиме рекомендуется увеличить вычисленное значение в 1.5…2 раза.
IБ= IБ_МИН×2 = 3,75 × 2 = 7.5 мА = 0,0075 A
Величина тока базы не превышает допустимый ток выхода ОМК 25 мА.
Требуемая величина IБ обеспечивается резистором R1, сопротивление которого вычисляется по формуле:
R1 = (VOH – VБЭ) / IБ
где VБЭ – падение напряжения на переходе «база-эмиттер» выбранного транзистора,
VOH – минимальное напряжение логической «1» на выходе ОМК. Параметр VOH зависит от тока: при токе 7.5 мА он равен 2.9 В.
R1=(2.9 - 1.2) / 7.5 мА ≈ 226.667 Ом
Выберем ближайшее значение из ряда Е24, равное 220 Ом.
-
Подсистема индикации
Семисегментный индикатор представляет собой устройство, содержащее восемь светодиодов, расположенных специальным образом и включённых по схеме с общим анодом (рис. 2.6).
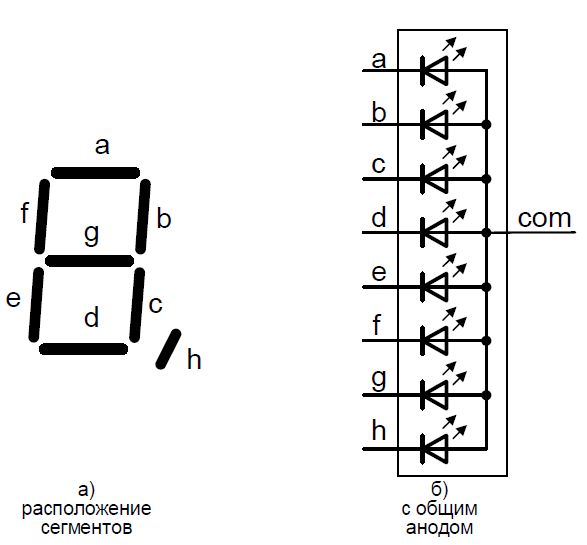
Рисунок 2.6 Семисегментные светодиодные индикаторы
Согласно [2] логические выходы ОМК при напряжении питания 3.3 В имеют следующие характеристики:
– напряжение логического «0» (при токе до 8 мА), VOL1..........0 В ≤VOL≤ 0.4 В
– напряжение логической «1» (при токе до 8 мА), VOH1........ 2.9 В ≤VIH≤ 3.3 В
– напряжение логического «0» (при токе до 20 мА), VOL2........0 В ≤
VOL≤ 1.3 В
– напряжение логической «1» (при токе до 20 мА), VOH2...... 2.0 В ≤VIH≤ 3.3 В
Из приведённых характеристик видно, что при токе 20 мА напряжение логического «0» VOL2может достигать 1.3 В, разность VDD – VOL2 будет равна 2 В, что недостаточно для некоторых типов СCИ. Поэтому выберем СCИ с номинальным прямым током IСCИ = 10 мА – при таком токе VOL1 ≤ 0.4 В, а VDD – VOL1≥ 2.9 В. Выберем ССИ SA08-21EWA [7]. Данный ССИ имеет красный цвет свечения, максимальный прямой ток равен 30 мА, максимальное прямое напряжение равно 2.5 В, общий анод, а рабочая температура варьируется от -40 до 85.
На рис. 2.7 у выбранного ССИ при токе 10 мА прямое падение напряжения VССИ составляет 1.9 В. Тогда напряжение на токоограничительном резисторе VRможно вычислить как:
VR= VDD– VOL1– VССИ
VR = 3.3 - 0.4 - 1.9 = 1 В
Сопротивление токоограничительного резистора вычисляется по формуле: R = VR / IССИ
R = 1 / 10 мА = 100 Ом
Из ряда Е24 выбираем ближайшее стандартное значение 100 Ом. Необходимая рассеиваемая мощность резистора вычисляется как:
P = R × IССИ2
P = 100 × 102 мА = 10 Вт
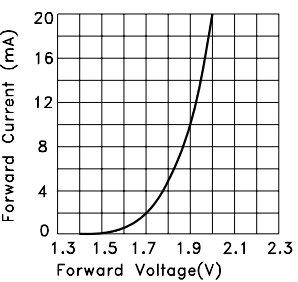
Рисунок 2.7 Прямое падение напряжения
-
Подсистема связи с ВУ
ОМК имеет в своём составе универсальный асинхронный приемопередатчик (УАПП), способный передавать и принимать информацию в формате, соответствующем заданию. Однако назначение и уровни сигналов на выводах УАПП не соответствуют спецификации физических интерфейсов RS-232, RS-485, RS-422, при помощи которых ССОИ должна взаимодействовать с верхним уровнем АСУ ТП.
Для решения описанной проблемы выпускается большое количество специальных микросхем-драйверов, обеспечивающих согласование интерфейсных сигналов. Рассмотрим особенности их применения для перечисленных интерфейсов.
Интерфейс RS-485 похож на RS-422, но использует единственную пару проводников для подключения до 32 устройств по схеме общей шины. Из-за этой особенности полнодуплексный обмен данными невозможен: в каждый момент времени на шине может быть активен лишь один передатчик. В связи с этим драйверу необходим дополнительный входной управляющий сигнал DE, разрешающий работу передатчика. Обычно есть и вход разрешения работы приёмника
RE, но его использование не является обязательным. Схема подключения драйвера MAX3483 [4] к ОМК приведена на рис. 2.8.
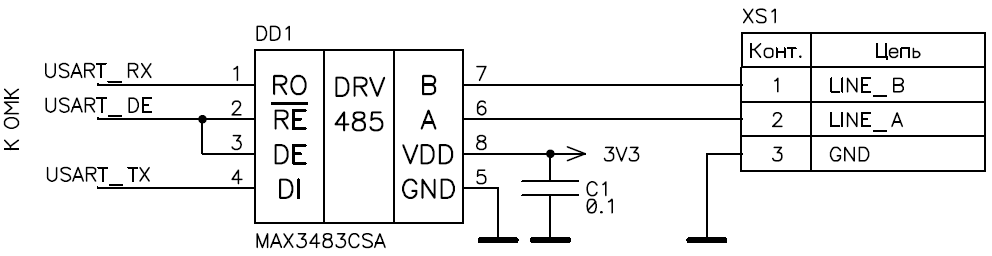
Рисунок 2.8 Подключение драйвера RS-485
У драйвера имеются входы разрешения передатчика DE (прямой) и приёмника /RE (инверсный), управляемые одним сигналом USART_DE, поступающим с ОМК. Если USART_DE находится в состоянии логической «1», то работа передатчика разрешена, а приёмника – запрещена. Когда на линии USART_DE присутствует логический «0», передатчик блокируется, а работа приёмника разрешается. УАПП некоторых ОМК обеспечивают аппаратное формирование сигнала USART_DE – в этом случае программа должна лишь правильно настроить УАПП. В рекомендуемых ОМК такой возможности нет, поэтому USART_DE необходимо формировать программно.
-
Вспомогательные элементы
Для нормальной работы ОМК к нему необходимо подключить цепи питания и некоторые вспомогательные цепи. Вариант схемы включения контроллера STM32F101T8 [2] показан на рис. 2.9.
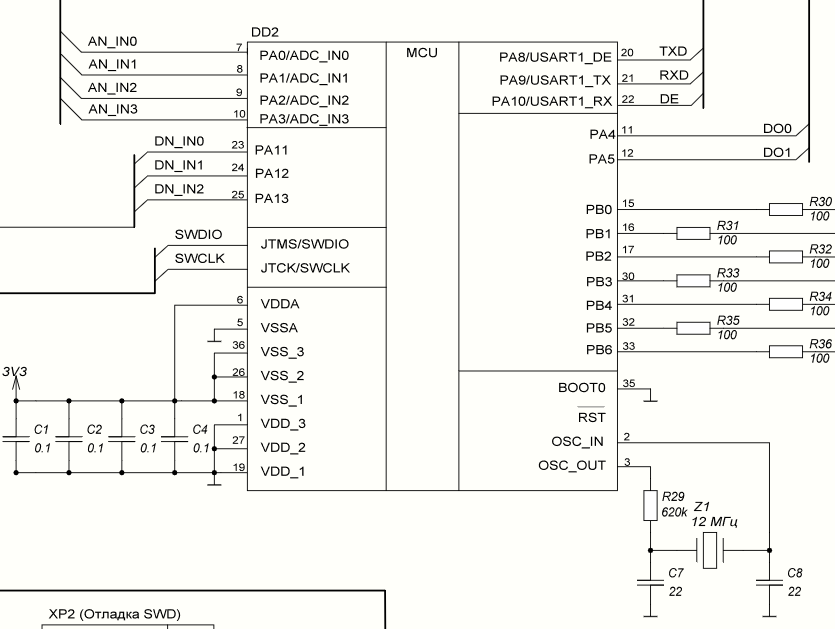
Рисунок 2.9 Схема включения контроллера STM32F101T8
Все входы питания GND подключаются к общему проводу, VDD– к цепи питания +3.3 В. Блокировочные конденсаторы C1…C4 ёмкостью 0.1 мкФ служат для подавления импульсных помех по цепям питания, возникающих при работе ОМК. Они подключаются к каждому выводу VDDи устанавливаются на печатной плате в непосредственной близости от этих выводов. Такие же конденсаторы рекомендуется устанавливать в цепи питания каждой микросхемы.
Для стабилизации частоты встроенного в ОМК тактового генератора используется кварцевый резонатор Z1. Согласно [1] резонансная частота Z1 может выбираться в пределах от 4 до 16 МГц. При выборе частоты Z1 следует учитывать, что умножитель в составе ОМК может увеличить её в целое число раз от 1 до 16, а максимальная частота на выходе умножителя не должна превышать 36 МГц.
Сброс ОМК, то есть приведение всех его узлов в исходное состояние, может выполняться с помощью внешнего сигнала, подаваемого на вход /RST.
Если внешний сброс не требуется, вход можно оставить свободным: за счёт встроенного подтягивающего резистора на нём будет поддерживаться неактивный уровень. Сброс при включении питания выполняется встроенной в ОМК схемой, она же перезапускает контроллер при сбоях питания.