Файл: О назначении полюсов в многовходных управляемых линейных системах.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.03.2024
Просмотров: 24
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

. То есть пусть  будет матрицей с векторами столбцов
будет матрицей с векторами столбцов  в только что написанном порядке, и пусть
в только что написанном порядке, и пусть  . Тогда
. Тогда  имеет блочную форму
имеет блочную форму
 . (10)
. (10)
В (10) матрицы встречающиеся на диагонали
встречающиеся на диагонали  являются сопутствующими матрицами
являются сопутствующими матрицами  .
.
 ,
,  (11)
(11)
и матрицы имеют размерность
имеют размерность  .
.
Наконец, , где
, где
 (12a)
(12a)
здесь
 (12b)
(12b)
и - матрица
- матрица  , которая не появляется, если
, которая не появляется, если  .
.
Чтобы проверить детали (10), (ll) и (12), отметим, что является столбцом компонентов
является столбцом компонентов  в базисе
в базисе  .
.
Таким образом, -й столбец
-й столбец  - это список компонентов, в этом базисе,
- это список компонентов, в этом базисе, 
, где - это -й базисный вектор. Этот список можно прочитать из (9). Аналогично  является столбцом компонент
является столбцом компонент  , так что (12) сразу следует из (8b).
, так что (12) сразу следует из (8b).
С в канонической форме будет в конечном итоге показано, что собственные значения
в канонической форме будет в конечном итоге показано, что собственные значения  могут быть заданы произвольно. Положим
могут быть заданы произвольно. Положим  и наблюдаем, что матрица
и наблюдаем, что матрица  подобна под
подобна под  к . Далее возьмите
к . Далее возьмите  в виде
в виде
 (13)
(13)
где
 , .
, .
В верхний блок имеет размерность  , а нижний блок размера
, а нижний блок размера  . Из (10)- (13) видно, что
. Из (10)- (13) видно, что
где, для ,
 .
.
Пусть будет определителем
будет определителем  , то есть
, то есть
 . (14)
. (14)
Из треугольной формы
 следует, что
следует, что
 .
.
Также из (14) ясно, что нули числа могут быть назначены произвольно (при условии сопряженности комплексных нулей) путем правильного выбора действительных коэффициентов  . Это показывает, что, в частности, система (1) всегда может быть стабилизирована путем соответствующего выбора
. Это показывает, что, в частности, система (1) всегда может быть стабилизирована путем соответствующего выбора  .
.
Чтобы показать, что может быть назначен произвольный набор собственных значений , необходимо учитывать тот факт, что матрицы
, необходимо учитывать тот факт, что матрицы  имеют фиксированную размерность. Если, например,
имеют фиксированную размерность. Если, например,  и
и  каждый имеют размерность
каждый имеют размерность  , невозможно назначить произвольную комплексную пару собственных значений путем независимой регулировки
, невозможно назначить произвольную комплексную пару собственных значений путем независимой регулировки  . Это дополнительная сложность, связанная с ограничением реальных параметров. Для продолжения пусть
. Это дополнительная сложность, связанная с ограничением реальных параметров. Для продолжения пусть  , где
, где  имеет вид (13) и подчиняется только требованию, чтобы все собственные значения
имеет вид (13) и подчиняется только требованию, чтобы все собственные значения  были различны. Только что было замечено, что такой выбор возможен. Тогда по лемме 1 пространство
были различны. Только что было замечено, что такой выбор возможен. Тогда по лемме 1 пространство  циклически относительно матрицы
циклически относительно матрицы
. По лемме 4 является управляемым. Применяя лемму 3, можно найти
является управляемым. Применяя лемму 3, можно найти  -вектор
-вектор  такой, что
такой, что  является управляемым. Теперь
является управляемым. Теперь  для подходящей
для подходящей  вектор
вектор  . Таким образом, если
. Таким образом, если  принимается в виде
принимается в виде
с скаляром и вектором
скаляром и вектором  , то система (1) становится
, то система (1) становится
 .
.
Наконец, поскольку теорема верна в случае с одним входом, можно выбрать в виде
таким образом, что матрица имеет требуемый набор собственных значений . То есть матрица «усиления»
имеет требуемый набор собственных значений . То есть матрица «усиления»
имеет обязательное свойство. Теорема доказана.
Комментарии
1) Конструкцию в доказательстве необходимости можно суммировать в терминах блок-схемы (рис.1). После выбора подходящего набора переменных состояния (каноническая форма (8) - (12)) конструктор строит внутренний цикл обратной связи (через матрицу ), который делает систему циклической, то есть управляемой одним входом. Затем разработчик выбирает подходящий ввод в виде
), который делает систему циклической, то есть управляемой одним входом. Затем разработчик выбирает подходящий ввод в виде  (
( -генератор ) и завершает внешний цикл, устанавливая
-генератор ) и завершает внешний цикл, устанавливая  для достижения требуемого размещения полюсов.
для достижения требуемого размещения полюсов.
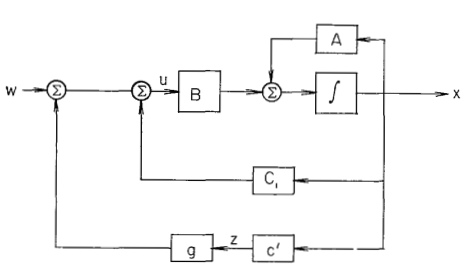
Рисунок 1. Построение в доказательстве после выбора канонических переменных состояния.
2) На практике может быть много способов выбора переменных состояния и величин , ,  для достижения заданного назначения полюсов. Использование этой свободы с помощью подходящих критериев проектирования является интересной проблемой современных исследований [5].
для достижения заданного назначения полюсов. Использование этой свободы с помощью подходящих критериев проектирования является интересной проблемой современных исследований [5].
3) Стоит отметить, что для данной пары может существовать более одной «канонической» формы (10)-(12). То есть матрица в (10) может не раскрывать внутреннюю структуру
может существовать более одной «канонической» формы (10)-(12). То есть матрица в (10) может не раскрывать внутреннюю структуру  , как это делают обычные рациональные канонические разложения в блочно-диагональные формы [3]. Недостаток таких блочно-диагональных представлений состоит в том, что, как правило, циклические подпространства, соответствующие отдельным блокам, не обязательно должны иметь образующие в подпространстве
, как это делают обычные рациональные канонические разложения в блочно-диагональные формы [3]. Недостаток таких блочно-диагональных представлений состоит в том, что, как правило, циклические подпространства, соответствующие отдельным блокам, не обязательно должны иметь образующие в подпространстве
. (10)В (10) матрицы
, и матрицы
Наконец,
здесь
(12b)и
Чтобы проверить детали (10), (ll) и (12), отметим, что
Таким образом,
, где
С
(13)где
В
где, для
.Пусть
Из треугольной формы
Также из (14) ясно, что нули числа
Чтобы показать, что может быть назначен произвольный набор собственных значений
. По лемме 4
с
Наконец, поскольку теорема верна в случае с одним входом,
таким образом, что матрица
имеет обязательное свойство. Теорема доказана.
Комментарии
1) Конструкцию в доказательстве необходимости можно суммировать в терминах блок-схемы (рис.1). После выбора подходящего набора переменных состояния (каноническая форма (8) - (12)) конструктор строит внутренний цикл обратной связи (через матрицу
Рисунок 1. Построение в доказательстве после выбора канонических переменных состояния.
2) На практике может быть много способов выбора переменных состояния и величин
3) Стоит отметить, что для данной пары

