ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 25.04.2024
Просмотров: 23
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

;
6) Количество колебаний в системе - 2.5.
Заключение
В начале расчета системы автоматической стабилизации определена статическая ошибка в СРР. Поскольку фактическое значение статической ошибки превышает заданное допустимое значение ошибки (таблица 1.1), то система СРР заменена на САУ.
Математическое описание процессов в функциональных элементах САУ позволяет построить структурную схему исходной системы. Найдены передаточные функции по управляющему и возмущающему воздействиям. На основании статического расчета найдено требуемое значение коэффициента передачи разомкнутой системы, который обеспечивает заданную точность стабилизации угловой скорости в установившемся режиме. Анализ устойчивости процессов в исходной замкнутой системе, с учетом реализации требуемого значения коэффициента передачи разомкнутой системы, позволяет сделать вывод, что система неустойчива.
Использование схемы корректирующего устройства, для которого найдена передаточная функция и рассчитаны параметры, позволило получить скорректированную систему, процессы в которой являются устойчивыми.
Список использованной литературы
1. Бурков А.Ф. Основы теории и эксплуатации судовых электроприводов [Электронный ресурс]: учебник / А. Ф. Бурков. — 3 е изд., стер. — Санкт Петербург: Лань, 2019. — 340 с.
2. Раздобреев М.М. Теория автоматического управления. Анализ линейных систем: учебное пособие / М.М. Раздобреев, В.Ю.Гросс, Б.В.Палагушкин, М.Н. Романов. - Новосибирск: Сиб. гос. унив. водн. трансп., 2020. - 111 с.
3. Гросс В. Ю. Теория автоматического управления: методические указания к компьютерному варианту лабораторных работ по курсу "Теория автоматического управления" / В. Ю. Гросс, Е. Г. Гурова; М-во трансп. Рос. Федерации; Федер. агентство мор. и реч. трансп.; ФБОУ ВПО "Новосиб. гос. акад. вод. трансп.". - Новосибирск: НГАВТ, 2014. - 54 с.: ил. - Библиогр.: с. 53. (75 экз.)
4. Бесекерский, В.А. Теория систем автоматического управления. изд. 4-е, перераб. и доп. [Текст] / В.А.Бесекерский, Е.П.Попов. - СПб.: Профессия, 2003. - 752 с.
Контрольные вопросы
Расчет мощности электродвигателей для стандартных режимов работы
Пример 3.1. Для приведенного графика нагрузки (рисунок 3.1) следует выбирать двигатель:
1) повторно-кратковременного режима;
2) кратковременного режима;
3) продолжительного режима.
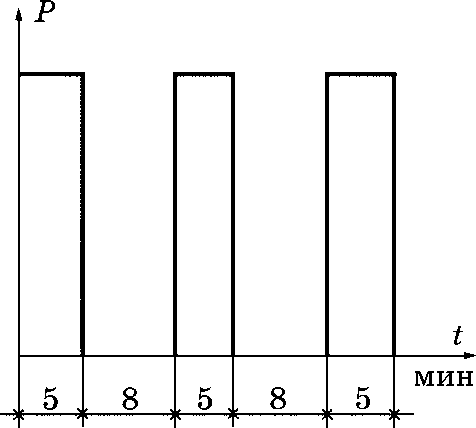
Рисунок 3.1- График нагрузки
Ответ: 1) продолжительного режима ( t=13 больше 10 – не может быть повторно кратковременным режимом, двигатель не успевает полностью остывать – не кратковременный режим)
Пример 3.2. Для повторно-кратковременного режима при увеличении продолжительности включения (ПВ) двигателя выше расчетной допустимый по нагреву момент должен быть:
допустимый по нагреву момент должен быть:
1) уменьшен;
2) увеличен;
3) остаться неизменным;
4) мало данных.
При решении примера рекомендуется учесть следующее: чтобы средние потери мощности за цикл при
при 
 не превышали средние потери мощности за цикл
не превышали средние потери мощности за цикл  при другом
при другом  , следует соблюдать равенство:
, следует соблюдать равенство: 

Решение:
Чтобы средние потери мощности за цикл при не превышали средние потери мощности за цикл при другом , должно соблюдаться равенство:
 (1)
(1)
Путь ПВ2 = аПВ1, тогда равенство (1) можно записать в виде


При увеличении ПВ2 в х раз,
 и
и
т. е. для повторно-кратковременного режима при увеличении продолжительности включения (ПВ) двигателя выше расчетной допустимый по нагреву момент должен быть уменьшен.
Ответ: 1) уменьшен
Пример 3.3. Определить мощность электродвигателя по нагрузочной диаграмме (рисунок 2.6). Условия теплоотдачи неизменны.
 ;
;  =1,5 мин;
=1,5 мин;  ;
;  =1,5 мин;
=1,5 мин;  =10 мин.
=10 мин.

Рисунок 2.6- Нагрузочная диаграмма
Решение:
Продолжительность включения электродвигателя:

где tР=t1+t2– время работы механизма, мин;
t0 – время паузы, мин;
tЦ=tР+t0 – время цикла работы механизма, мин.
Эквивалентная мощность двигателя за время одного цикла:

В соответствии с методом эквивалентных потерь мощности для расчета эквивалентной мощности электродвигателя при ближайшем стандартном значении ПВ
= 25% можно записать:
 =
= 

Условие выбора мощности электродвигателя с :
:

поэтому можно записать:

Ответ:
Ответ: 8,65 кВт
Пример 3.3. При работе двигателя в повторно-кратковременном режиме с ПВ = 15% его номинальная мощность равна 60 кВт. При работе с ПВ = 60% и пренебрежении постоянными потерями номинальная мощность двигателя составит:
1)60 кВт;
2) 120 кВт;
2) 30 кВт;
2) 15 кВт.
При решении примера рекомендуется учесть следующее: в соответствии с методом эквивалентных потерь мощности при пренебрежении постоянными потерями для пересчета мощности можно записать:
 =
= 
Решение:
Пересчет номинальной мощности производим по формуле:

Для двигателя с номинальной мощностью 60 кВт в, мощности в повторно-кратковременном режиме с ПВ = 60%

Ответ: 2) 30 кВт
Пример 3.4. Двигатель работает в продолжительном режиме (ПВ = 100%). Номинальный момент его равен 50 Н·м. При работе двигателя в повторно-кратковременном режиме с ПВ = 25% его номинальный момент составит:
1) 50 Н·м;
2) 100 Н
6) Количество колебаний в системе - 2.5.
Заключение
В начале расчета системы автоматической стабилизации определена статическая ошибка в СРР. Поскольку фактическое значение статической ошибки превышает заданное допустимое значение ошибки (таблица 1.1), то система СРР заменена на САУ.
Математическое описание процессов в функциональных элементах САУ позволяет построить структурную схему исходной системы. Найдены передаточные функции по управляющему и возмущающему воздействиям. На основании статического расчета найдено требуемое значение коэффициента передачи разомкнутой системы, который обеспечивает заданную точность стабилизации угловой скорости в установившемся режиме. Анализ устойчивости процессов в исходной замкнутой системе, с учетом реализации требуемого значения коэффициента передачи разомкнутой системы, позволяет сделать вывод, что система неустойчива.
Использование схемы корректирующего устройства, для которого найдена передаточная функция и рассчитаны параметры, позволило получить скорректированную систему, процессы в которой являются устойчивыми.
Список использованной литературы
1. Бурков А.Ф. Основы теории и эксплуатации судовых электроприводов [Электронный ресурс]: учебник / А. Ф. Бурков. — 3 е изд., стер. — Санкт Петербург: Лань, 2019. — 340 с.
2. Раздобреев М.М. Теория автоматического управления. Анализ линейных систем: учебное пособие / М.М. Раздобреев, В.Ю.Гросс, Б.В.Палагушкин, М.Н. Романов. - Новосибирск: Сиб. гос. унив. водн. трансп., 2020. - 111 с.
3. Гросс В. Ю. Теория автоматического управления: методические указания к компьютерному варианту лабораторных работ по курсу "Теория автоматического управления" / В. Ю. Гросс, Е. Г. Гурова; М-во трансп. Рос. Федерации; Федер. агентство мор. и реч. трансп.; ФБОУ ВПО "Новосиб. гос. акад. вод. трансп.". - Новосибирск: НГАВТ, 2014. - 54 с.: ил. - Библиогр.: с. 53. (75 экз.)
4. Бесекерский, В.А. Теория систем автоматического управления. изд. 4-е, перераб. и доп. [Текст] / В.А.Бесекерский, Е.П.Попов. - СПб.: Профессия, 2003. - 752 с.
Контрольные вопросы
Расчет мощности электродвигателей для стандартных режимов работы
Пример 3.1. Для приведенного графика нагрузки (рисунок 3.1) следует выбирать двигатель:
1) повторно-кратковременного режима;
2) кратковременного режима;
3) продолжительного режима.
Рисунок 3.1- График нагрузки
Ответ: 1) продолжительного режима ( t=13 больше 10 – не может быть повторно кратковременным режимом, двигатель не успевает полностью остывать – не кратковременный режим)
Пример 3.2. Для повторно-кратковременного режима при увеличении продолжительности включения (ПВ) двигателя выше расчетной
допустимый по нагреву момент должен быть:1) уменьшен;
2) увеличен;
3) остаться неизменным;
4) мало данных.
При решении примера рекомендуется учесть следующее: чтобы средние потери мощности за цикл
при не превышали средние потери мощности за цикл при другом , следует соблюдать равенство: Решение:
Чтобы средние потери мощности за цикл
при не превышали средние потери мощности за цикл при другом , должно соблюдаться равенство:
(1)Путь ПВ2 = аПВ1, тогда равенство (1) можно записать в виде
При увеличении ПВ2 в х раз,
и т. е. для повторно-кратковременного режима при увеличении продолжительности включения (ПВ) двигателя выше расчетной
допустимый по нагреву момент должен быть уменьшен.Ответ: 1) уменьшен
Пример 3.3. Определить мощность электродвигателя по нагрузочной диаграмме (рисунок 2.6). Условия теплоотдачи неизменны.
; =1,5 мин; ; =1,5 мин; =10 мин. Рисунок 2.6- Нагрузочная диаграмма
Решение:
Продолжительность включения электродвигателя:
где tР=t1+t2– время работы механизма, мин;
t0 – время паузы, мин;
tЦ=tР+t0 – время цикла работы механизма, мин.
Эквивалентная мощность двигателя за время одного цикла:
В соответствии с методом эквивалентных потерь мощности для расчета эквивалентной мощности электродвигателя при ближайшем стандартном значении ПВ
= 25% можно записать:
= Условие выбора мощности электродвигателя с
: поэтому можно записать:
Ответ:
Ответ: 8,65 кВт
Пример 3.3. При работе двигателя в повторно-кратковременном режиме с ПВ = 15% его номинальная мощность равна 60 кВт. При работе с ПВ = 60% и пренебрежении постоянными потерями номинальная мощность двигателя составит:
1)60 кВт;
2) 120 кВт;
2) 30 кВт;
2) 15 кВт.
При решении примера рекомендуется учесть следующее: в соответствии с методом эквивалентных потерь мощности при пренебрежении постоянными потерями для пересчета мощности можно записать:
= Решение:
Пересчет номинальной мощности производим по формуле:
Для двигателя с номинальной мощностью 60 кВт в, мощности в повторно-кратковременном режиме с ПВ = 60%
Ответ: 2) 30 кВт
Пример 3.4. Двигатель работает в продолжительном режиме (ПВ = 100%). Номинальный момент его равен 50 Н·м. При работе двигателя в повторно-кратковременном режиме с ПВ = 25% его номинальный момент составит:
1) 50 Н·м;
2) 100 Н

