Файл: Реферат по дисциплине Адаптивные и оптимальные цифровые системы управления по теме Прохождение случайной функции через стационарную линейную систему.docx
Добавлен: 29.04.2024
Просмотров: 20
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

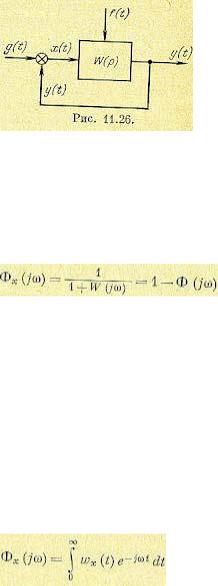
. Тогда можно легко найти спектральную плотность  выходного сигнала. Действительно, по определению спектральная плотность на входе связана с изображением Фурье
выходного сигнала. Действительно, по определению спектральная плотность на входе связана с изображением Фурье  случайной величины
случайной величины
 соотношением (11.61):
соотношением (11.61):
Это же соотношение имеет место и для выходного сигнала:
В линейной системе изображения Фурье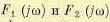 связаны между собой посредством частотной передаточной функции:
связаны между собой посредством частотной передаточной функции:
Отсюда можно найти
 (11.109)
(11.109)
Таким образом, спектральная плотность выходной величины может быть получена умножением спектральной плотности входной величины на квадрат модуля частотной передаточной функции линейной системы. Отметим, что приведенное выше доказательство, вообще говоря, не является строгим, так как существование стационарного случайного процесса на выходе не доказано.
При известной спектральной, плотности выходной величины может быть найдена корреляционная функция
выходной величины может быть найдена корреляционная функция  по преобразованию Фурье (11.66) или (11.68).
по преобразованию Фурье (11.66) или (11.68).
Получим выражение (11.109) более строго. Для этого используем формулу (11.107). Так как в реальных системах весовая функция тождественно равна нулю при t < 0, то нижние пределы интегрирования можно положить равными . Полагая, что на входе действует
. Полагая, что на входе действует
центрированный процесс , имеем
, имеем
 (11.110)
(11.110)
Найдем теперь спектральную плотность для выходного сигнала. Она связана с корреляционной функцией соотношением (11.65):
Подставляя в последнюю формулу значение корреляционной функции из (11.110), получаем
Последнее выражение совпадает с (11.109), что и требовалось доказать, Для нахождения дисперсии, или среднего квадрата выходной величины, необходимо
проинтегрировать по всем частотам спектральную плотность:
 (11.112)
(11.112)
Отметим, что закон распределения для случайной величины может, вообще говоря, меняться при прохождении ее через линейную систему. Однако, в случае, если на входе линейной системы имеется нормальное распределение случайной величины х1 (t), то на выходе для случайной величины х2 (t) также будет иметь место нормальное распределение.
При вычислении интеграла (11.112) обычно приходится иметь дело с подынтегральным выражением вида
системе может быть не выше 2n — 2. Для удобства интегрирования написанное выше выражение обычно представляют в виде
Полином содержит только четные степени
содержит только четные степени  . Полином
. Полином  для устойчивой системы может иметь корни только в верхней полуплоскости. Область устойчивости оказалась в верхней полуплоскости вследствие того, что была использована подстановка
для устойчивой системы может иметь корни только в верхней полуплоскости. Область устойчивости оказалась в верхней полуплоскости вследствие того, что была использована подстановка  , а
, а
множитель j означает поворот комплексного числа на угол .
.
Таким образом, вычисление дисперсии (11.112) можно свести к нахождению интеграла

(11.113)
В общем случае, при любом га для устойчивой системы интеграл 1п может быть представлен в виде [38]
 (11.114)
(11.114)
где
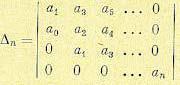 (11.115)
(11.115)
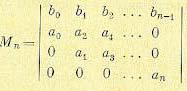
совпадает со старшим определителем Гурвица, а числитель определяется выражением
 (11.116)
(11.116)
Интегралы такого вида вычислены до n = 7 и сведены в таблицы (см. приложение 2). Заметим, что знаменатель правых частей приведенных в приложении 2 формул
представляет собой — определитель Гурвица. На границе колебательной устойчивости этот определитель обращается в нуль, а дисперсия выходной величины будет стремиться к бесконечности.
— определитель Гурвица. На границе колебательной устойчивости этот определитель обращается в нуль, а дисперсия выходной величины будет стремиться к бесконечности.
В заключение рассмотрим два важных случая прохождения случайного сигнала через линейную систему.
Статистическое дифференцирование. При поступлении случайного сигнала на идеальнбе дифференцирующее устройство с передаточной функцией W (р) = р спектральная плотность выходной величины (производной от входной величины) может быть получена умножением спектральной плотности входной величины на :
:
 (11.117)
(11.117)
при двойном дифференцировании — на и т. д.
и т. д.
Статистическое интегрирование. При поступлении случайного сигнала на идеальное
интегрирующее звено с передаточной функцией спектральная плотность выходной величины (интеграла
спектральная плотность выходной величины (интеграла
от входной величины) может быть получена делением интегральной плотности входной величины на :
:

(11.118)
при двойном интегрировании — на и т. д.
и т. д.
ЗАКЛЮЧЕНИЕ
До сих пор поведение систем автоматического регулирования исследовалось при определенных, заданных во времени задающих и возмущающих воздействиях (ступенчатая функция, импульсная функция, гармоническое воздействие и т. д.).
Однако во многих случаях характер воздействия бывает таким, что его нельзя считать определенной функцией времени. Оно может принимать с течением времени самые разнообразные случайные значения. В таких случаях мы можем оценить только вероятность появления той или иной формы воздействия в тот или иной момент времени. Это происходит не потому, что оно неизвестно заранее, а потому, что сама природа реального задающего или возмущающего воздействия такова, что величина его в каждый момент времени и процесс его изменения с течением времени зависят от множества разнообразных величин, которые случайным образом могут комбинироваться друг с другом, появляться одновременно или с любым сдвигом во времени И т. д.
Возьмем, например, систему автоматического регулирования напряжения электрического генератора. Возмущающее воздействие здесь является результатом изменения нагрузки в сети, зависящей от включения, выключения и изменения режима работы множества потребителей электрической энергии.
Другой пример — автопилот. На него действуют обычно возмущающие воздействия случайного характера: порывы ветра и изменения других атмосферных факторов, изменение тяги, изменения напряжения питания усилителей и рулевых машинок и т. д.
Третий пример — следящие системы, на вход которых попадают вместе с полезным сигналом помехи. Например, в радиолокационной системе сопровождения отраженный от цели сигнал содержит в себе помехи в виде многочисленных флуктуаций, происходящих от вибраций и поворотов цели, замирания сигнала и т. п.
Аналогичные помехи случайной природы имеют место в других автоматических устройствах.
ЛИТЕРАТУРА
1. Бесекерский В. А., Попов Е. П. Теория систем автоматического регулирования. – СПб: Изд-во «Профессия», 2004. – 752 с.
2. Душин С.Е., Зотов Н.С., Имаев Д.Х. и др.Теория автоматического управления. Учебник/под ред. В.Б. Яковлева.-2-е изд.,перераб.-М.:Высш. шк.,2005.-567с
3. Ерофеев А.А..Теория автоматического управления. Учебник/ -2-е изд.,доп.и перераб.-СПб.:Политехника,2005.-302с.
Это же соотношение имеет место и для выходного сигнала:
В линейной системе изображения Фурье
Отсюда можно найти
(11.109)Таким образом, спектральная плотность выходной величины может быть получена умножением спектральной плотности входной величины на квадрат модуля частотной передаточной функции линейной системы. Отметим, что приведенное выше доказательство, вообще говоря, не является строгим, так как существование стационарного случайного процесса на выходе не доказано.
При известной спектральной, плотности
Получим выражение (11.109) более строго. Для этого используем формулу (11.107). Так как в реальных системах весовая функция тождественно равна нулю при t < 0, то нижние пределы интегрирования можно положить равными
центрированный процесс
Найдем теперь спектральную плотность для выходного сигнала. Она связана с корреляционной функцией соотношением (11.65):
Подставляя в последнюю формулу значение корреляционной функции из (11.110), получаем
Последнее выражение совпадает с (11.109), что и требовалось доказать, Для нахождения дисперсии, или среднего квадрата выходной величины, необходимо
проинтегрировать по всем частотам спектральную плотность:
(11.112)Отметим, что закон распределения для случайной величины может, вообще говоря, меняться при прохождении ее через линейную систему. Однако, в случае, если на входе линейной системы имеется нормальное распределение случайной величины х1 (t), то на выходе для случайной величины х2 (t) также будет иметь место нормальное распределение.
При вычислении интеграла (11.112) обычно приходится иметь дело с подынтегральным выражением вида
| где | представляют собой некоторые полиномы от комплексной переменной . |
| | Наивысшую степень знаменателя обозначим 2n. Наивысшая степень числителя в реальной |
системе может быть не выше 2n — 2. Для удобства интегрирования написанное выше выражение обычно представляют в виде
Полином
множитель j означает поворот комплексного числа на угол
Таким образом, вычисление дисперсии (11.112) можно свести к нахождению интеграла
(11.113)
В общем случае, при любом га для устойчивой системы интеграл 1п может быть представлен в виде [38]
где
(11.115)совпадает со старшим определителем Гурвица, а числитель определяется выражением
(11.116)Интегралы такого вида вычислены до n = 7 и сведены в таблицы (см. приложение 2). Заметим, что знаменатель правых частей приведенных в приложении 2 формул
представляет собой
В заключение рассмотрим два важных случая прохождения случайного сигнала через линейную систему.
Статистическое дифференцирование. При поступлении случайного сигнала на идеальнбе дифференцирующее устройство с передаточной функцией W (р) = р спектральная плотность выходной величины (производной от входной величины) может быть получена умножением спектральной плотности входной величины на
при двойном дифференцировании — на
Статистическое интегрирование. При поступлении случайного сигнала на идеальное
интегрирующее звено с передаточной функцией
от входной величины) может быть получена делением интегральной плотности входной величины на
(11.118)
при двойном интегрировании — на
ЗАКЛЮЧЕНИЕ
До сих пор поведение систем автоматического регулирования исследовалось при определенных, заданных во времени задающих и возмущающих воздействиях (ступенчатая функция, импульсная функция, гармоническое воздействие и т. д.).
Однако во многих случаях характер воздействия бывает таким, что его нельзя считать определенной функцией времени. Оно может принимать с течением времени самые разнообразные случайные значения. В таких случаях мы можем оценить только вероятность появления той или иной формы воздействия в тот или иной момент времени. Это происходит не потому, что оно неизвестно заранее, а потому, что сама природа реального задающего или возмущающего воздействия такова, что величина его в каждый момент времени и процесс его изменения с течением времени зависят от множества разнообразных величин, которые случайным образом могут комбинироваться друг с другом, появляться одновременно или с любым сдвигом во времени И т. д.
Возьмем, например, систему автоматического регулирования напряжения электрического генератора. Возмущающее воздействие здесь является результатом изменения нагрузки в сети, зависящей от включения, выключения и изменения режима работы множества потребителей электрической энергии.
Другой пример — автопилот. На него действуют обычно возмущающие воздействия случайного характера: порывы ветра и изменения других атмосферных факторов, изменение тяги, изменения напряжения питания усилителей и рулевых машинок и т. д.
Третий пример — следящие системы, на вход которых попадают вместе с полезным сигналом помехи. Например, в радиолокационной системе сопровождения отраженный от цели сигнал содержит в себе помехи в виде многочисленных флуктуаций, происходящих от вибраций и поворотов цели, замирания сигнала и т. п.
Аналогичные помехи случайной природы имеют место в других автоматических устройствах.
ЛИТЕРАТУРА
1. Бесекерский В. А., Попов Е. П. Теория систем автоматического регулирования. – СПб: Изд-во «Профессия», 2004. – 752 с.
2. Душин С.Е., Зотов Н.С., Имаев Д.Х. и др.Теория автоматического управления. Учебник/под ред. В.Б. Яковлева.-2-е изд.,перераб.-М.:Высш. шк.,2005.-567с
3. Ерофеев А.А..Теория автоматического управления. Учебник/ -2-е изд.,доп.и перераб.-СПб.:Политехника,2005.-302с.

