Файл: Методические указания по изучению разделов и тем курса Исполнительные механизмы систем управления.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.05.2024
Просмотров: 86
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.




 ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮГосударственное образовательное учреждение высшего профессионального образования
«ПЕНЗЕНСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ»
ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ СИСТЕМ УПРАВЛЕНИЯ
Методические указания и задания для контрольных работ
Пенза ИИЦПГУ 2006
ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ СИСТЕМ УПРАВЛЕНИЯ
Методические указания и задания для контрольных работ
Редактор А. Г. Темникова
Технический редактор А. М. Цыбулов
Компьютерная верстка Ф. Д. Фафурина
Сдано в производство 10.04.06. Формат 60x84. Бумага типогр. № 1.
Печать трафаретная. Усл. печ. л. 5.35.
Заказ № 44. Тираж 70.
Информационно-издательский центр ПГУ Пенза. Красная, 40. т.: 56-47-33
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
Государственное образовательное учреждение
высшего профессионального образования
«ПЕНЗЕНСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ»
ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ СИСТЕМ УПРАВЛЕНИЯ
Методические указания и задания для контрольных работ
Пенза ИИЦ ПГУ 2006
УДК 681.58 ББК 32.963
Дана программа и методические указания по изучению разделов и тем курса «Исполнительные механизмы систем управления».
Приведены сведения о классификации, устройстве, принципах работы и характеристиках исполнительных двигателей постоянного тока, асинхронных трехфазных и шаговых двигателей, электромагнитных исполнительных устройств.
Изложены методика расчета электромагнитов постоянного тока различных систем, методика расчетных оценок основных характеристик исполнительных двигателей
постоянного тока и методика выбора исполнительных двигателей по заданным техническим требованиям.
Приведены задания для выполнения контрольных работ по изучаемому курсу
Методические указания подготовлены на кафедре «Автоматика и телемеханика» и предназначены для студентов заочного факультета специальности 220201 - Управление и информатика в технических системах.
Составители:Л.//.Николаев,Б. А. Малёв
Рецензент: кандидат технических наук, начальник лаборатории
ФГУП НИИ Физических измерений
С. А. Исаков
ДЛЯ ЗАМЕТОК
ДЛЯ ЗАМЕТОК
Содержание
ВВЕДЕНИЕ 4
-
ОБЩИЕ СВЕДЕНИЯ ОБ ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВАХ 5 -
ПРОГРАММА КУРСА И МЕТОДИЧЕСКИЕ УКАЗАНИЯ
ПО ИЗУЧЕНИЮ ЕГО РАЗДЕЛОВ И ТЕМ 20
-
ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ НА БАЗЕ ЭЛЕКТРОПРИВОДА ПОСТОЯННОГО ТОКА 25 -
ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ НА БАЗЕ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА 37 -
ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ НА БАЗЕ ЭЛЕКТРОПРИВОДА С ШАГОВЫМИ ДВИГАТЕЛЯМИ 46 -
ЭЛЕКТРОМАГНИТНЫЕ ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ :58 -
ЗАДАНИЯ ДЛЯ КОНТРОЛЬНЫХ РАБОТ 77
БИБЛИОГРАФИЧЕСКИЙ СПИСОК 82
ПРИЛОЖЕНИЕ 34
ВВЕДЕНИЕ
Исполнительные механизмы систем управления (технические средства использования командной информации и воздействия на объект управления) образуют выходную функциональную группу изделий Государственной системы промышленных приборов и средств автоматизации (рис. 1).

Эти технические средства обычно называют исполнительными устройствами. Исполнительное устройство (ИУ) - это силовое устройство, предназначенное для изменения регулирующего воздействия на объект управления в соответствии с сигналом управления, поступающим на его вход от командного устройства (блока ручного управления, регулятора, контроллера, управляющей ЭВМ). Исполнительное устройство в обшем случае состоит из двух основных частей: исполнительного механизма (ИМ) и регулирующего органа (РО).
Исполнительный механизм преобразует входную командную информацию в определенное силовое воздействие на регулирующий орган объек

та управления или на сам объект управления.
Регулирующий орган производит непосредственное регулирующее воздействие на объект управления. Изменение положения регулирующего органа вызывает изменение потока энергии или материала, поступающих на объект, и тем самым воздействует на рабочие машины, механизмы и технологические процессы, устраняя отклонения регулируемой величины от заданного значения. Исполнительный механизм не только изменяет со-
4
Таблица П.6
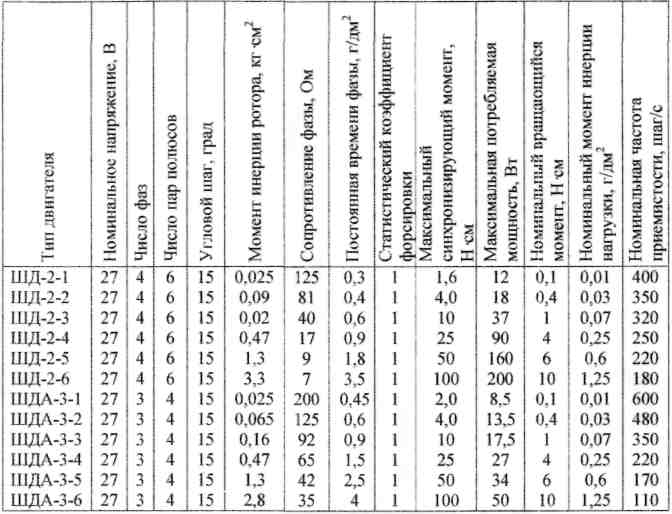
Основные технические данные реверсивных магнитоэлектрических шаговых двигателей серии ЩД и ЩДА
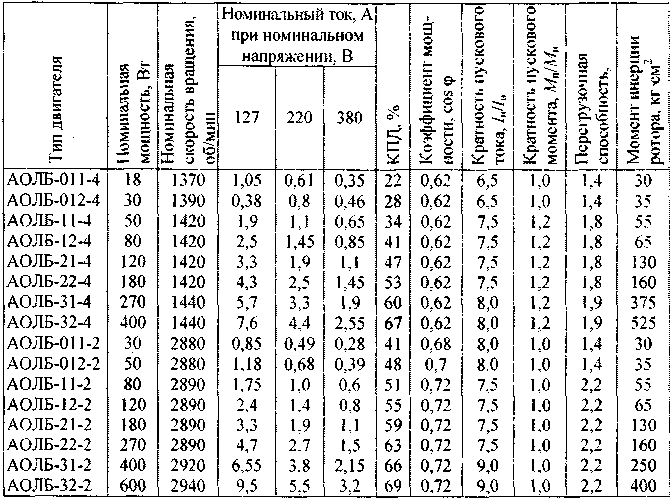
Таблица П.5
Основные технические данные однофазных асинхронных двигателей с пусковым сопротивлением серии АОЛБ
стояние управляемого объекта, но и перемещает регулирующий орган в соответствии с заданным законом регулирования при минимально возможных отклонениях.
В большинстве случаев исполнительный механизм действует от посторонних источников энергии, т.к. непосредственное управление исполнительным механизмом от первичных элементов регулирования (микропроцессоров, реле, датчиков и др.) невозможно вследствие их малой мощности, недостаточной для воздействия на регулирующий орган. Конкретные ИУ могут изготавливаться как в виде единых конструктивных модулей, так и собираться из отдельных блоков.
1 ОБЩИЕ СВЕДЕНИЯ ОБ ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВАХ
1.1 Классификация исполнительных механизмов и регулирующих органов
Классификация исполнительных механизмов (рис. 1.1) производится в первую очередь по виду энергии, создающей усилие (момент) перемещения регулирующего органа. Соответственно, ИМ бывают пневматические, гидравлические и электрические.
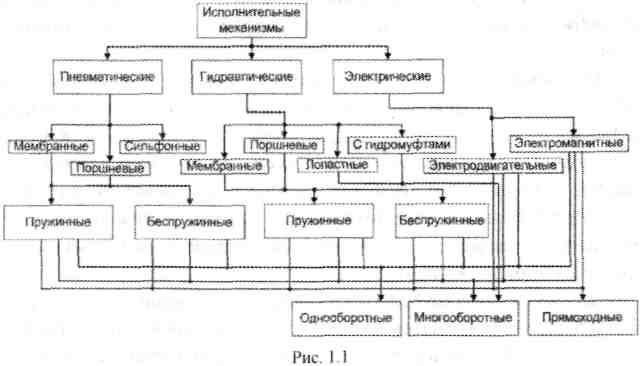
В пневматических ИМ усилие перемещения создается за счет давления сжатого воздуха на мембрану, поршень или сильфон; давление обычно не превышает WкПа.
5
В гидравлических ИМ усилие перемещения создается за счет давления жидкости на мембрану, поршень или лопасть; давление жидкости в них обычно находится в пределах (2,5 + 20)10* кПа. Отдельный подкласс гидравлических ИМ составляют ИМ с гидромуфтами.
Пневматические и гидравлические мембранные и поршневые ИМ подразделяются на пружинные и беспружинные. В пружинных ИМ усилие перемещения в одном направлении создается давлением в рабочей полости ИМ, а в обратном направлении - силой упругости сжатой пружины. В беспружинных ИМ усилие перемещения в обоих направлениях создается перепадом давления на рабочем органе механизма.
Электрические ИМ по принципу действия подразделяются на электродвигательные (электромашинные) и электромагнитные.
По характеру движения выходного элемента большинство ИМ подразделяется на прямоходные с поступательным движением выходного элемента, поворотные с вращательным движением до 360° (однооборотные) и с вращательным движением на угол более 360° (многооборотные).
Существуют ИМ, в которых используются одновременно два вида энергии: электропневматические, электрогидравлические и пневмогидрав-лические. Вид энергии управляющего сигнала может отличаться от вида энергии, создающей усилие перемещения.
В электрических системах автоматизации и управления наиболее широко применяются электромашинные и электромагнитные исполнительные механизмы.
Основным элементом электромашинного ИМ является электрический двигатель постоянного или переменного тока. Такие исполнительные механизмы обычно называют электроприводами, т.к. согласно ГОСТ электропривод - это электромеханическая система, состоящая из электродвигательного, электрического преобразовательного, механического передаточного, управляющего и измерительного устройств, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением.
Электромагнитные ИМ дискретного действия выполняются в основном на базе электромагнитов постоянного и переменного тока и постоянных магнитов. Жесткое и упругое соединение узлов систем осуществляют различного рода электромагнитные муфты.
Множество регулирующих органов также многообразно, как многообразны объекты управления. В качестве примера можно привести основные типы РО, применяемых в системах подачи и перемещения жидких, газооб-
6
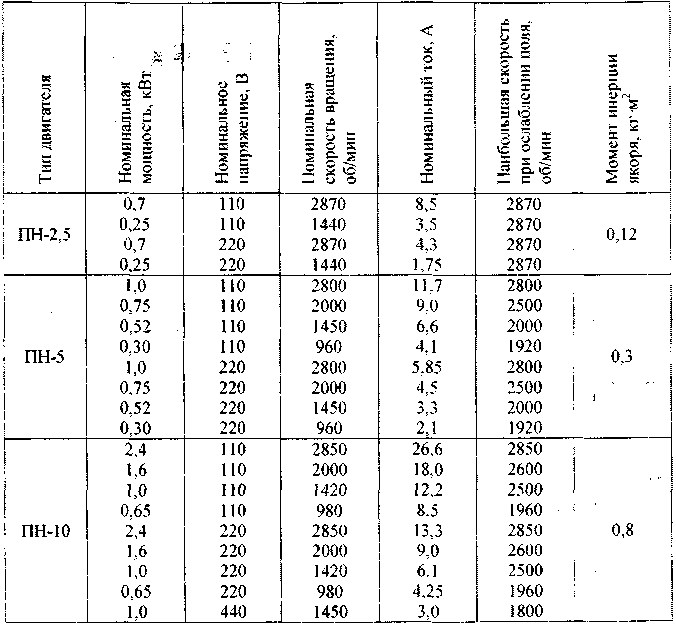
Таблица П.З Основные технические данные двигателей постоянного тока серии ПН
разных и сыпучих материалов. По виду воздействия на объект их можно подразделить на два основных типа: дросселирующие и дозирующие.
Дросселирующие РО изменяют сопротивление (гидравлическое, аэродинамическое) в системе путем изменения своего проходного сечения, воздействуя на расход вещества. Примерами таких РО являются заслонки, диафрагмы, задвижки, краны, клапаны.
Дозирующие РО выполняют заданное дозирование поступающего вещества или энергии за счет изменения производительности определенных агрегатов: дозаторов, насосов, компрессоров, питателей, электрических усилителей мощности.
1.2 Классификация, структуры и состав электромашинных исполнительных механизмов
Классификация электромашинных ИМ. Электромашинные ИМ (электроприводы) можно классифицировать по различным признакам (рис. 1.2).

86
7
По роду тока электродвигателя. В ИМ постоянного тока применяются коллекторные и бесконтактные двигатели постоянного тока, в ИМ переменного тока - асинхронные и синхронные двигатели.
По характеру движения. Вращательные ИМ приводятся в движение вращающимися двигателями, прямоходные ИМ - вращающимися двигателями с механическими преобразователями вращательного движения в возвратно-поступательное или непосредственно линейными двигателями. Каждый из этих ИМ может быть непрерывным или дискретным. В ИМ непрерывного действия в установившемся режиме подвижные части находятся в состоянии непрерывного движения, в дискретном - в состоянии дискретного (шагового) движения.
По степени управляемости. Нерегулируемый ИМ предназначен для приведения в действие РО объекта управления с одной рабочей скоростью; параметры ИМ (например, скорость, момент и др.) изменяются только в результате возмущающих воздействий. Регулируемый ИМ может приводить в действие РО с изменяемой скоростью; параметры ИМ изменяются под воздействием управляющего устройства.
По степени автоматизации. Автоматизированным называется регулируемый ИМ с автоматическим регулированием параметров. К этому типу относятся программно-управляемые, следящие и адаптивные ИМ. В программно-управляемом ИМ управление движением РО осуществляется по закону, определенному заранее и заданному программой. Частным случаем таких ИМ можно считать позиционный ИМ, предназначенный для перемещения РО из одного фиксированного положения в другое. Следящий ИМ автоматически отрабатывает перемещение РО в соответствии с произвольно меняющимся задающим сигналом. Адаптивный ИМ обладает способностью автоматически избирать структуру и (или) параметры системы управления при изменении условий работы объекта управления с целью выработки оптимального режима.
Автоматизированный ИМ в большинстве случаев является замкнутым, т.е. действующим на основе принципа обратной связи. Исключение составляет автоматизированный дискретный ИМ с шаговыми двигателями, который может быть разомкнутым. Неавтоматизированный ИМ имеет руч