Файл: Методические указания по изучению разделов и тем курса Исполнительные механизмы систем управления.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.05.2024
Просмотров: 92
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Оценим механическую характеристику по показателям устойчивости, жесткости и линейности. Если воспользоваться формальным признаком устойчивости
Пуск. Условием пуска двигателя является неравенство
это условие выполняется, то при включении двигателя в сеть ротор приходит в движение и разгоняется до установившегося режима. При пуске
У асинхронных двигателей малой мощности и специальных двигателей с повышенным критическим скольжением обычно кратность пускового
42
тельно упрощать кинематическую схему ряда электроприводов, устраняя механические преобразователи вращательного движения в поступательное. Однокоординатный ЛШД можно представить как развернутый на плоскости ШД вращательного типа.
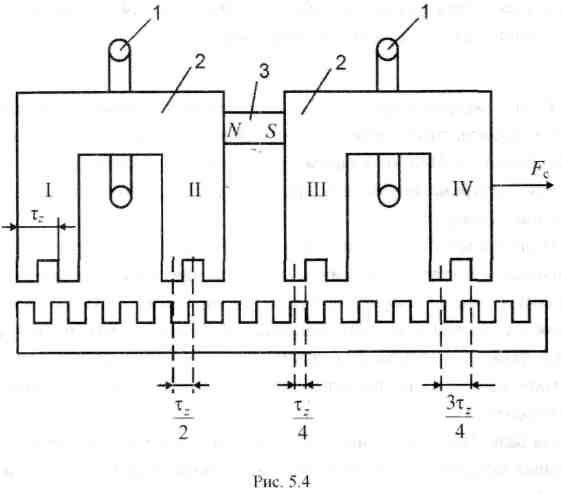
На рисунке 5.4 показана схема магнитной системы двухфазного од-нокоординатного ЛШД индукторного типа. Ротор ЛШД (подвижная часть), называемый иногда позиционером, выполнен в виде двух П-образных маг-нитопроводов 2 из электротехнической стали, которые подмагничиваются постоянным магнитом 3. На каждом из магнитопроводов ротора расположено по обмотке управления 1. Статор 4 представляет собой плиту из маг-нитомягкого материала, поверхность плиты, обращенная к рото]ру, зубчатая.
Поверхность полюсов ротора также зубчатая. Зубцовые деления
т2 ротора и статора равны. Зубцы двух полюсов в пределах одного магнито-провода ротора сдвинуты по отношению к зубцам статора на 1 /2 зубцовогс деления, одного магнитопровода по отношению к другому - на 1/4 зубцо-вого деления. В результате зубцы всех полюсов ротора по-разному ориентированы относительно зубцов статора, но магнитное сопротивление потоку подмагничивания не зависит от перемещения якоря.
51
Важным показателем переходных режимов (
рование, торможение) является приемистость ШД. Приемистость пуска -это наибольшая частота управляющих импульсов, отрабатываемых шаговым электродвигателем без потери шагов при пуске из состояния фиксированной стоянки под током.
Скачкообразное увеличение частоты управляющих импульсов при пуске от нуля до рабочей частоты приводит к тому, что в начале ротор отстает от МДС статора под действием момента инерции вращающихся частей. По мере ускорения он достигает угловой скорости МДС статора и за счет запасенной кинетической энергии может опередить МДС. Постепенно колебания затухают, и двигатель переходит в установившийся режим. Таким образом, в процессе пуска может возникнуть расхождение между числом шагов ротора и МДС статора. Приемистость растет с увеличением синхронизирующего момента, а также с уменьшением шага и момента инерции вращающихся частей; момент трения отрицательно влияет на приемистость.
По аналогии могут быть введены понятия приемистости торможения и реверсирования, их значения несколько отличаются от приемистости пуска.

Если пренебречь моментом трения МТи рассматривать уравнение равновесия моментов на валу ШД при малых углах рассогласования осей ротора и МДС статора, то получим дифференциальное уравнение движения ротора:
В выражении (5.4)
мент; J-момент инерции ротора;
ляющих импульсов, соответствующая главному резонансу,
эффициент демпфирования колебаний Dзависит от магнитного потока ротора. Наибольший коэффициент демпфирования у ШД активного типа, у реактивных двигателей он близок к нулю.
5.2 Особенности конструкции и принципа работы линейного шагового двигателя
Линейные шаговые двигатели (ЛШД) преобразуют импульсную команду непосредственно в линейное перемещение. Это позволяет значи50
тока и допускается непосредственное включение двигателя в сеть
Если
ходится применять специальные способы пуска. У двигателей с коротко-замкнутым ротором это в основном способы пуска при пониженном напряжении питания. Недостатком способов пуска при пониженном напряжении является то, что пропорционально квадрату фазного напряжения уменьшается пусковой момент.
Реверсирование двигателя. Изменение направления вращения ротора осуществляется изменением направления вращения поля статора. Для этого достаточно поменять местами выводы двух любых фаз.
Торможение двигателя. Для быстрой остановки двигателя могут применяться различные способы электрического торможения: рекуперативное, торможение противовключением и динамическое торможение.
Рекуперативное торможение происходит при работе асинхронной машины в режиме генератора параллельно с сетью, т.е. при . На
практике этот режим встречается редко, в основном при переходе с высших угловых скоростей на низшие, например, при изменении числа пар полюсов или частоты напряжения питания.
Торможение противовключением происходит в том случае, когда магнитное поле статора вращается в одном направлении, а ротор в противоположном. При этом угловая скорость ротора и создаваемый двигателем момент имеют противоположные знаки.
Динамическое торможение осуществляется отключением обмотки статора от сети переменного тока и подключением к сети постоянного тока. Возникает неподвижное поле статора, которое наводит ЭДС и токи во вра
щающемся роторе. В результате взаимодействия этих токов с полем статора создается тормозной момент.
Регулирование скорости. Трехфазные асинхронные двигатели используют в основном в приводах, не требующих широкого регулирования угловой скорости ротора. Однако в последнее время расширяется применение этих дешевых и надежных двигателей и в регулируемом электроприводе, в том числе в станках с числовым программным управлением. Основные способы регулирования угловой скорости ротора основаны на изменении скорости поля за счет изменения частоты напряжения питания или числа полюсов, т.к.
4?
Изменение числа пар полюсов позволяет дискретно регулировать Для реализации этого способа требуется либо укладывать на статоре несколько обмоток с различным pм, либо выполнять одну обмотку из секций, выведенных на коммутатор. Основным недостатком способа регулирования является ступенчатый характер изменения угловой скорости, число ступеней скорости не превышает 3...4.
Регулирование скорости в ограниченном диапазоне возможно также за счет изменения амплитуды напряжения питания, а у двигателей с контактными кольцами - за счет изменения добавочного сопротивления в цепи ротора.
Однако наиболее перспективным, особенно в системах автоматического управления, является частотный способ регулирования скорости.
4.2 Унифицированные исполнительные механизмы
с нерегулируемыми трехфазными и однофазными
асинхронными двигателями
Унифицированные исполнительные механизмы с трехфазными и однофазными асинхронными двигателями в настоящее время выпускаются в основном с нерегулируемой (постоянной) скоростью движения. Аналогичные исполнительные механизмы переменной скорости, у которых регулирование осуществлялось за счет изменения напряжения или тока в обмотках статора с помощью магнитных усилителей, широкого распространения не получили. Объясняется это большими габаритами и массой блока уси