Файл: Методические указания по изучению разделов и тем курса Исполнительные механизмы систем управления.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.05.2024
Просмотров: 90
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
54
в роторе возможно только при неравенстве угловых скоростей ротора
создания электромагнитного момента в любом режиме работы асинхронной машины. В качестве характеристики этого неравенства вводится понятие скольжения
Работу асинхронной машины рассмотрим на примере машины с ко-роткозамкнутым ротором (рис. 4.2).

Пусть магнитное поле статора
моническому правилу правой руки. Токи ротора во взаимодействии с полем статора создают электромагнитные силы
Электромагнитный момент
лен в сторону вращения ротора и разгоняет его в сторону поля, электрическая энергия сети преобразуется в механическую энергию на валу ротора, т.е. машина работает в режиме двигателя. Электромагнитный момент, развиваемый двигателем при неподвижном роторе, является пусковым момен39
том. Угловая скорость, до которой разгоняется ротор, тем больше, чем меньше момент нагрузки на валу двигателя. При отсутствии нагрузки угловая скорость стремится к , но в реальных машинах никогда не достигает ее, т.к. при
, а момент сопротивления нулю не равен - его создают силы трения в двигателе. Следовательно, теоретический диапазон работы асинхронной машины в режиме двигателя
Если магнитное поле статора и ротор вращаются в одну сторону и за счет подведения внешней механической энергии
ходит в режим генератора; теоретический диапазон режима генератора
Если ротор вращается в сторону, противоположную магнитному полю статора, то электромагнитный момент направлен против направления вращения ротора и машина работает в режиме торможения противовк-лючением; теоретический диапазон работы в режиме торможения проти-вовключением
Линейный асинхронный двигатель в простейшем случае можно получить, если вращающийся двигатель разрезать по диаметру и развернуть на плоскости. При этом магнитное поле получается не вращающимся, а бегущим, и электрическая энергия преобразуется в механическую поступательного движения.
Электромагнитный момент. Электромагнитный момент, возникающий в результате взаимодействия вращающегося магнитного поля статора с токами, наведенными этим полем в роторе, может быть определен из выражения
где - конструктивный коэффициент, зависящий от числа фаз, числа полюсов и числа витков в фазе обмотки статора.
Как видно из (4.4), электромагнитный момент прямо пропорционатен основному магнитному потоку

При этом основной поток определяется напряжением питания и не зависит от нагрузки, а ток ротора и его фаза относительно ЭДС зависят от скольжения и соответственно от нагрузки:
40
двух функциональных узлов: импульсного усилителя мощности УМ и распределителя импульсов РИ, управляющего работой УМ. Число каналов е усилителе мощности равно числу обмоток управления ШД (в рассматриваемом случае УМ1-УМ4).
Коммутатор шагового двигателя. Коммутатор служит для преобразования одноканальной последовательности командных импульсов
Первую часть этой задачи решает распределитель импульсов РИ. Распределители импульсов бывают:

53
-
нереверсивные, обеспечивающие одно направление вращения; -
реверсивные, обеспечивающие оба направления вращения.
Принцип работы такого ЛШД не отличается от принципа работы индукторного ШД вращательного типа. В зависимости от напичия и знака импульса в обмотках управления максимум магнитного поля перемещается от полюса к полюсу ротора, например, по схеме
щая сила перемещает ротор в такое положение, чтобы против зубцов данного полюса ротора находились зубцы статора, т.е. на 1/4 зубцового деления.
В общем случае линейный механический шаг
В многокоординатном ЛШД осуществлено механическое объединение электромагнитных систем, обеспечивающих перемещение по нескольким координатам. При этом рассмотренные выше однокоординатные ЛШД являются электромагнитными модулями, обеспечивающими перемещение по каждой из координат.
В линейных ЛШД применяют магнитно-воздушную подвеску. Ротор
притягивается к статору силами магнитного притяжения полюсов ротора. Через специальные форсунки под ротор нагнетается сжатый воздух, между ротором и статором возникает воздушная подушка, и ротор подвешивается над статором с минимальным воздушным зазором. При этом обеспечивается близкое к нулю сопротивление движению ротора и высокая точность позиционирования.
На базе ШД и ЛШД могут быть созданы многокоординатные исполнительные механизмы, осуществляющие сложные перемещения в декартовой, цилиндрической и сферической системах координат.
5.3 Система разомкнутого дискретного привода с шаговым двигателем
Разомкнутые дискретные приводы с шаговыми двигателями в настоящее время получили весьма широкое распространение благодаря двум свойствам: простоте конструкции и возможности фиксации конечных координат перемещений без датчиков обратной связи, т.е. работе в режиме слежения. На рисунке 5.5 показана функциональная схема разомкнутого дискретного привода с четырехфазным ШД.
Управляющим устройством является преобразователь сигналов П, который преобразует заданную команду
устройства в цифровом или. в отдельных случаях, в аналоговом виде, в од-ноканальную последовательность импульсов, соответствующую целям и требованиям процесса регулирования. Полупроводниковый коммутатор К является силовым преобразователем дискретного привода и состоит из
52
В этих выражениях и - активное и индуктивное сопротивления фазы ротора.
Формула момента (4.4) получена для режима двигателя, но она справедлива и для других режимов с учетом знака и диапазона значений скольжения 5.
Механические характеристики.
Уравнением естественной механической характеристики асинхронного двигателя является выражение (4.4) с заменой скольжения на угловую скорость по (4.3) при
фик характеристики изображен на рисунке 4.3.
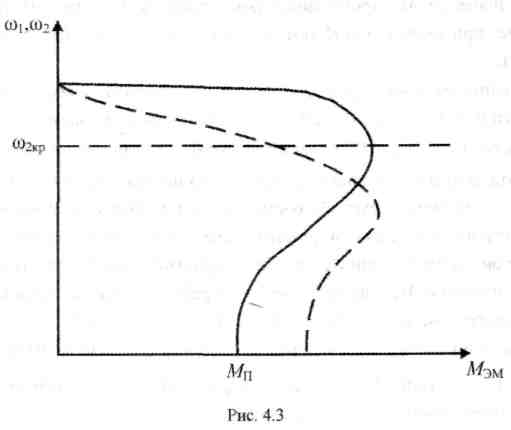
Такой вид характеристики легко поясняется с помощью формул (4.4)-(4.6). При увеличении скольжения ток ротора I2 непрерывно растет, но становится все более индуктивным - уменьшается cos ф2, т.к. увеличивается частота токов в роторе и, соответственно, его индуктивное сопротивление. В результате активная составляющая тока ротора и. соответственно, электромагнитный момент вначале растут, а затем начинают убывать.
41
Скольжение, при котором момент достигает максимального значения Мшах, называется критическим и обозначается. ; на основании (4.3) соответствующая критическая скорость
необходимо, воспользовавшись выражением (4.4), взять производную и приравнять ее к нулю. Решение получающегося уравнения имеет вид
В большинстве асинхронных двигателей необходимо обеспечить высокий КПД. Поэтому активное сопротивление обмоток, в частности , определяющее уровень электрических потерь в роторе, стремятся получить малым. При этом критическое скольжение лежит в диапазоне 0,1...0,25.
Максимальный момент пропорционален квадрату напряжения питания, не зависит от активного сопротивления роторной цепи R2и наступает при скольжении тем большем, чем больше активное сопротивление роторной цепи (рис. 4.3, штрих-пунктирная линия).
Пусковой момент двигателя Мн определяется выражением (4.4) при S= 1. Значение Мнпропорционально квадрату напряжения питания и возрастает при увеличении R2(см. рис. 4.3), достигая максимума при