ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.05.2024
Просмотров: 26
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Содержание
Раздел 1……………………………………………….…….……….……3
1.1 Маневренность пожарных автомобилей и спасательной техники. Конструктивные решения по улучшению маневренности автомобилей и машин…………………………………………………………………….….….3
1.2 Понятие об экологических классах базового шасси
пожарного автомобиля и спасательной техники………………………….….6
1.3 Назначение, классификация и общее устройство рулевого
управления. Усилители рулевого управления………………………………..9
1.4 Пост технического обслуживания пожарной части: назначение, оборудование и инструмент. Виды выполняемых работ……………….….14
Раздел 2…………………………………………….…….……………...21
Список используемых источников……………………………………23
1 Контрольные вопросы и ответы
1.1 Маневренность пожарных автомобилей и спасательной техники. Конструктивные решения по улучшению маневренности автомобилей и машин
Автомобили должны обладать хорошей маневренностью. Она требуется при значительном изменении направления движения в условиях города, когда часто приходится совершать повороты на 90°, при необходимости в движении задним ходом или полном развороте. Высокая маневренность также необходима при погрузке и разгрузке автомобилей на небольших площадках.
Маневренность характеризует удобство использования автомобиля и легкость управления им при необходимости движения и выполнения поворотов и разворотов в стесненных условиях, а также проходимость автомобиля при движении по грунтовым дорогам с крутыми поворотами, по пересеченной местности и через лес. От маневренности автомобилей зависят размеры необходимых площадок в местах погрузки и выгрузки, а иногда и затраты времени на выполнение этих операций, требуемая ширина проездов в гаражах, на площадках для стоянки и в зонах обслуживания.
Маневренность существенно зависит от конструкции автомобиля: углов поворота управляемых колес, базы, размеров свесов, конструкции сцепных устройств автопоездов, габаритных размеров прицепов и полуприцепов, а также от усилия, прилагаемого водителем к рулевому колесу, при маневрировании автомобиля.
Показатели маневренности существенно зависят от числа управляемых колес у автомобиля. Так, у двухосного автомобиля со всеми управляемыми колесами минимальный радиус поворота Rminв два раза меньше, чем у такого же автомобиля, но с передними управляемыми колесами. В соответствии с рисунком 1.1,б у автомобиля со всеми управляемыми колесамиулучшаются и остальные показатели маневренности.
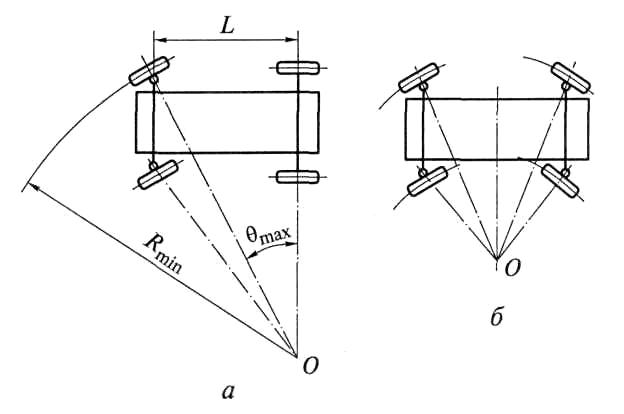
Рисунок 1.1 Схемы автомобилей с передними (а) и всеми (б) управляемыми колесами
Однако при всех управляемых колесах усложняется конструкция автомобиля и затрудняется отъезд автомобиля от края тротуара, к которому он стоял вплотную. Кроме того, у такого автомобиля нарушается устойчивость при входе в поворот. Устранить указанные недостатки можно блокированием системы управления задних колес в нейтральном положении как при отъезде от тротуара, так и при движении автомобиля с высокой скоростью.
У трехосного автомобиля с передними управляемыми колесами значительное влияние на показатели маневренности оказывает соотношение между базойl тележки среднего и заднего мостов и базой Lавтомобиля. Так, например, для трехосного автомобиля общего назначения оптимальное соотношение этих баз l/L ≤ 0,3.
У прицепного автопоезда существенное влияние на его маневренность оказывают длина дышла и база прицепа. При уменьшении этих параметров маневренность прицепного автопоезда повышается.
У седельного автопоезда значительное влияние на маневренность оказывает соотношение длины автомобиля-тягача и полуприцепа.
Прицепные автопоезда имеют лучшую маневренность, чем седельные. Это подтверждают показатели маневренности аналогичных по грузоподъемности седельных и прицепных автопоездов. Так, например, при повороте на 90° ширина полосы движения седельного автопоезда может быть больше на 60 %, чем у трехзвенного автопоезда (с двумя прицепами), а при повороте на 180° она может возрасти на 100 %.
Одиночные автомобили более маневренны, чем прицепные и седельные автопоезда. В соответствии с рисунком 1.2 при движении автомобиля-тягача с прицепом или полуприцепом маневренность ухудшается, так как при поворотах автопоезда прицеп или полуприцеп смещается к центру поворота.
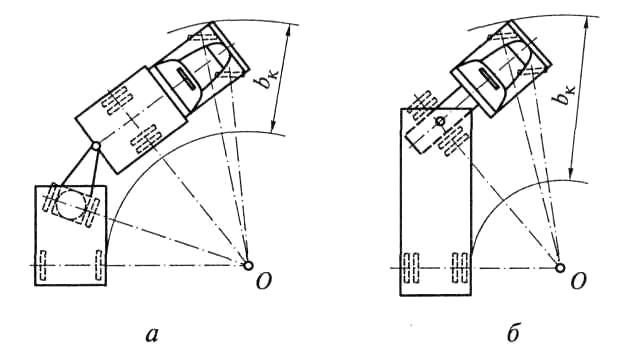
Рисунок 1.2 Маневренность прицепного (а) и седельного (б) автопоездов
Вследствие этого ширина полосы движения автопоезда больше, чем у одиночного автомобиля. При этом ширина полосы движения автопоезда возрастает с увеличением базы и ширины прицепа и полуприцепа, а также числа буксируемых прицепов. Кроме того, при движении автопоезда на поворотах возникают поперечные колебания прицепа, которые могут привести к нарушению устойчивости автопоезда.

Ухудшение маневренности автомобиля влечет за собой ухудшение его проходимости. Так, ширина полосы движения (поворотная ширина автомобиля), характеризующая его маневренность на малых площадках (карьеры, стройки, товарные дворы железнодорожных станций и т.д.), определяет также проходимость автомобиля в горизонтальной плоскости.
Применение задних управляемых осей в сочетании с передними при всех прочих равных параметрах позволяет значительно улучшить показатели поворачиваемости автомобиля в различных условиях и на всех режимах движения. Это важное преимущество может обеспечить длиннобазным многоосным автомобилям хорошую вписываемость в кривые дорожной сети и удовлетворительную маневренность в условиях различной местности, строительных площадках, в том числе и в горных условиях, а для двухосных легковых автомобилей успешно решать все обостряющуюся проблему «тесноты» транспортного потока больших городов.
В рулевых управлениях используются электрические системы с электродвигателями, обеспечивающие «подруливание» задних колес автомобиля на крутых поворотах. При возникновении неисправности в системе электропривода задние колеса устанавливаются в нейтральное положение. Такое конструктивное решение значительно улучшает маневренность автомобиля, что в настоящее время достаточно актуально при парковках автомобиля, проблема которых является достаточно острой в крупных населенных пунктах.
1.2 Понятие об экологических классах базового шасси пожарного
автомобиля и спасательной техники
Экологический класс транспортного средства – это специальный код, который делит все транспортные средства, в зависимости от того, сколько вредных веществ содержится в выхлопных газах. Кроме этого экологический класс учитывает, насколько вредны испарения, которые того или иного топлива, используемого в конкретном транспортном средстве.
К таким экологически вредным веществам относятся: оксид углерода (СО); оксид азота (NO); различные углеводороды (Cm, Hn); различные мелкие твердые вещества, которые содержатся в выхлопных газах автомобиля.
Стандартизация автомобилей по экологическим классам.
Стандарт Евро-1 – самый первый стандарт контроля количества вредных веществ в выхлопных газах автомобилей. Относился только к автомобилям с бензиновыми двигателями и регламентировал допустимые нормы содержания в выхлопных газах оксид углерода, оксидов азота и углеводородов. По сравнению со следующими стандартами, это был достаточно лояльный стандарт по отношению к автомобилям, но не по отношению к экологии.
Стандарт Евро-2 – более жесткий стандарт, который предусматривал снижение количества углеводородов, содержащихся в выхлопных газах, в три раза. В Российской Федерации этот стандарт был принят с 2005 года. Но его применение для определения содержания вредных веществ в выхлопах авто, началось только в 2006 году.
Что касается практики применения этого стандарта, в некоторых крупных городах въезд автомобилей, не подпадающих под этот стандарт, был ограничен. Например, такое наблюдалось в Москве. Автомобили, которые не подходили по выбросам под стандарт Евро-2, не пускались даль-
ше третьего кольца.
Стандарт Евро-3 регламентирует содержание вредных компонентов в выхлопах не только у автомобилей, ездящих на бензине, но и у автомобилей, имеющих дизельные двигатели. Стандарт Евро-3 еще больше ужесточает требования к выхлопным газам. Снижение вредных компонентов в выхлопных газах, по отношению к предыдущему стандарту, должно быть
на 30-40%.
Стандарт Евро-4 в станах Европы начал использоваться с 2005 года. В Российской федерации этот стандарт действует с 2010 года. Стандарт еще больше ужесточает требования к выбросам в атмосферу отработанных газов. По сравнению с предыдущим стандартом, содержание вредных компонентов в выхлопных газах транспортных средств уменьшается на 40%.
Стандарт Евро-5 – наиболее современный на данный момент экологический стандарт, регулирующий содержание вредных веществ в выхлопных газах. Стандарт Евро-5 с октября 2008 года стал обязательным для всех новых грузовых автомобилей, продаваемых в странах Евросоюза. На легковые автомобили он распространился несколько позже – с 1 сентября 2009 года. В Российской Федерации Евро-5 действует на все ввозимые автомобили, начиная с 1 января 2014 года.
Одновременно регламентом устанавливаются основные технические требования к характеристикам бензина и дизельного топлива, позволяющие обеспечить введение вышеперечисленных экологических классов автомобильной техники.
Наряду с указанными нормами в регламент включены нормы прямого действия (ГОСТ Р 51832-2001) в отношении грузовых автомобилей и автобусов, работающих на бензине. Применение этих норм связано с отсутствием аналогичных международных документов.
Предусматривается разработка порядков установления экологических классов транспортных средств, введенных в эксплуатацию до вступления в силу регламента, введения дифференцированной платы за загрязнение окружающей среды автомобильной техники, а также ввоза в Россию автомобильной техники и двигателей, подлежащих обязательному подтверждению соответствия регламенту, а также положения о паспортах транспортных средств и шасси соответствующего экологического класса.
1.3 Назначение, классификация и общее устройство рулевого
управления. Усилители рулевого управления
Рулевое управление автомобиля служит для изменения направления движения автомобиля. При неподвижной передней оси это осуществляется поворотом колес.
Классификация рулевых управлений:
1) по способу поворота автомобиля;
- поворотом управляемых колес;
- торможением колеса одного борта;
- вращением колес одного борта в сторону, обратную движению;
- складыванием элементов (одноосный тягач и одноосный прицеп).
2) По расположению рулевого колеса:
- правое;
- левое.
3) По расположению управляемых колес на:
- двухосных автомобилях (первой оси, второй оси, первой и второй осей);
- трехосных автомобилях (первой оси, первой и третьей осей);
- четырехосных автомобилях (первой и второй осей, первой и третьей осей, всех осей).
Рулевой механизм включает в себя рулевую пару (иногда называют рулевой передачей), размещенную в картере, рулевой вал, рулевую колонку и рулевое колесо.
К конструкции рулевых механизмов предъявляется ряд специальных требований:
а) высокий КПД в прямом направлении (при передаче усилия от рулевого колеса) для облегчения управления автомобилем и несколько пониженный КПД в обратном направлении для снижения силы толчков, передаваемых на рулевое колесо от управляемых колес при наезде на неровности;
б) обратимость рулевой пары, чтобы рулевой механизм не препятствовал стабилизации управляемых колес;
в) минимальный зазор в зацеплении элементов рулевой пары в нейтральном положении управляемых колес и в некотором диапазоне углов поворота (беззазорное зацепление) при обязательной возможности регулирования зазора в процессе эксплуатации;
г) заданный характер изменения передаточного числа рулевого механизма;
д) травмобезопасность рулевого механизма, с тем чтобы при лобовом столкновении он не был причиной травмы водителя.
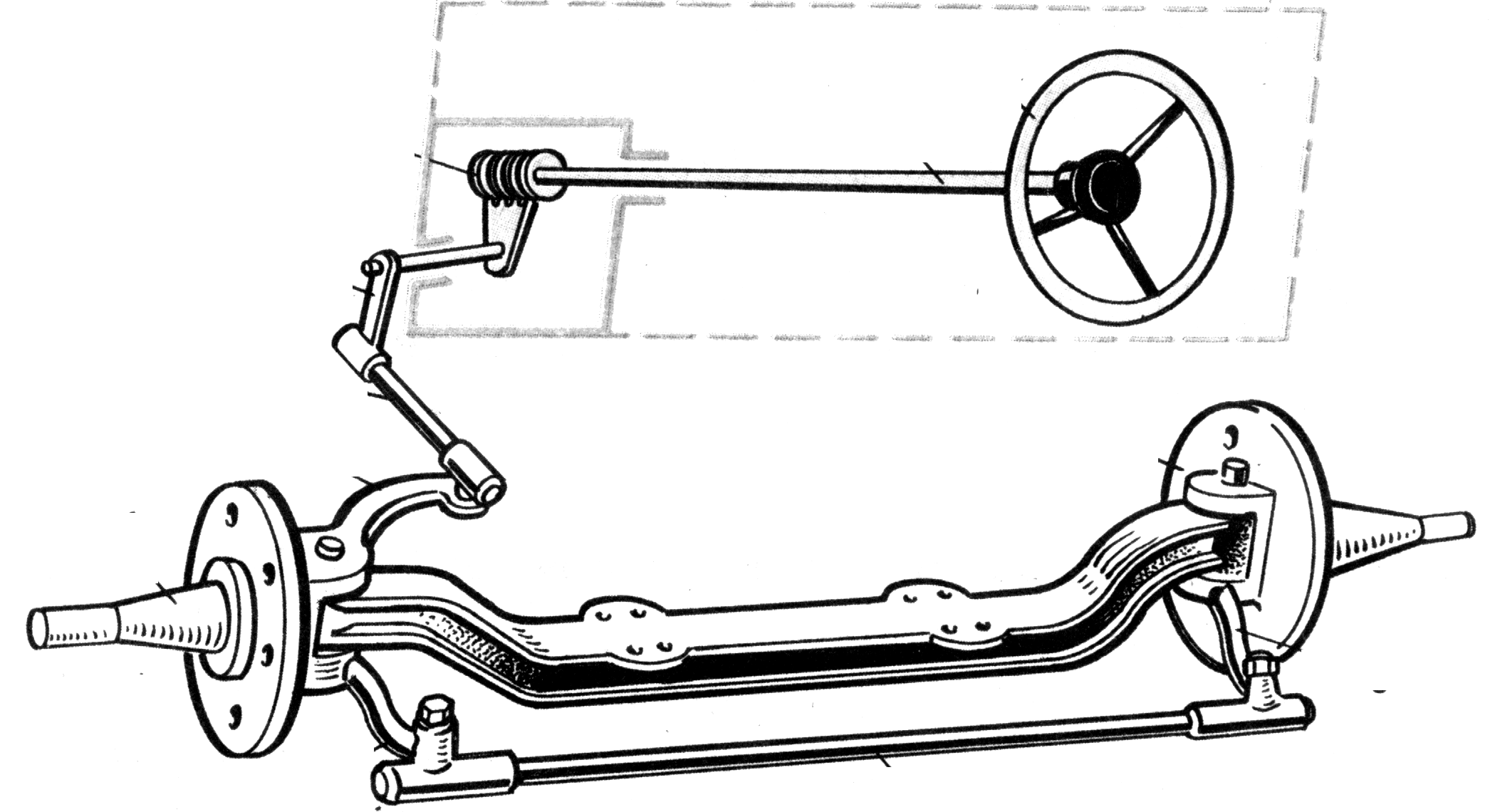
В соответствии с рисунком 1.3 рулевое управление состоит из следующих основных частей: рулевого колеса 12 с валом 10, находящимся в рулевой колонке 11, червяка 9, рулевого привода, состоящего из рулевой сошки 8, продольной рулевой тяги 7, рычагов 1, 4, 6, поворотных цапф 5 и поперечной тяги 2.
1
3
4

