ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 22.10.2024
Просмотров: 24
Скачиваний: 0
СОДЕРЖАНИЕ
Содержание Введение…………………………………………………………………………...……3
2.1 Определение сил инерции и сил тяжести
3.1 Геометрический расчёт равносмещенного зубчатого зацепления
3.2 Синтез и анализ планетарного редуктора
3.3 Определение частот вращения зубчатых колес аналитическим и графическим методами
4 Синтез и анализ кулачкового механизма
4.1 Построение кинематических диаграмм и определение масштабных коэффициентов
4.2 Определение минимального радиуса кулачка
4.3 Построение профиля кулачка
4.4 Определение максимальной линейной скорости и ускорения толкателя
Содержание Введение…………………………………………………………………………...……3
1 Синтез и анализ механизма 4
1.1 Структурный анализ механизма 4
1.2Определение скоростей 5
1.3Определение ускорений 7
1.4 Диаграммы движения выходного звена 8
1.5 Определение угловых скоростей и ускорений 9
1.6 Определение скоростей и ускорений центров масс звеньев 9
2 Силовой анализ механизма 10
2.1 Силытяжести и силыинерции 10
2.2 Расчёт диады 4-5 10
2.3 Расчёт диады 2-3 12
2.4 Расчёт кривошипа 1 13
2.5 Рычаг Жуковского 14
2.6 Определение мощностей 14
2.7 Определение кинетической энергии механизма 15
3 Проектирование зубчатого зацепления. Синтез планетарного редуктора 16
3.1 Геометрический расчёт равносмещённого зубчатого зацепления 16
3.2 Синтез и анализ планетарного редуктора 19
3.3 Определение частот вращения зубчатых колес аналитическим и графическим методами . 21
4 Синтез и анализ кулачкового механизма………………………………………….23
4.1 Построение кинематических диаграмм и определение масштабных коэффициентов………………………………………………………………………..23
4.2 Определение минимального радиуса кулачка…………………………………..24
4.3 Построение профиля кулачка…………………………………………………….24
4.4 Определение максимальной линейной скорости и ускорения толкателя……..24
Заключение…………………………………………………………………….……25
Список литературы 26
Введение
Легковой автомобиль повышенной проходимости имеет четыре ведущих колеса и предназначен для перевозки грузов до 500 кг по горным и лесным дорогам со скоростью до 60 км/ч.
Двухцилиндровый четырехтактный двигатель внутреннего сгорания развивает мощность до 40 л.с. Различают два режима работы двигателя: номинальный режим, когда муфта сцепления включена и холостой режим работы, когда муфта сцепления выключена. Рабочий цикл в каждом цилиндре двигателя совершается за два оборота коленчатого вала и характеризуется индикаторной диаграммой.
Основной механизм состоит из двух одинаковых горизонтальных кривошипно-ползунных механизмов (1-2-3 и 1-4-5), кривошипы которых располагаются под углом 1800 друг к другу на одном коленчатом валу. Управление газораспределением в цилиндрах осуществляется подвесными клапанами, которые приводятся в движение кулачковым механизмом. Кулачки закреплены на валу, который кинематический вязан с коленчатым валом через зубчатую передачу. Движение клапанам передается через рычажную систему. Движение каждому ведущему колесу автомобиля передается от дифференциалов через карданный вал и зубчатую передачу.
1Синтез и анализ механизма
Исходные данные:
Размеры звеньев: ОА=ОС= 40 мм;АВ=СD=150 мм;
Частота вращенияколенчатого вала: nкр= 5000 мин -1;
Схема механизма (Рисунок 1).
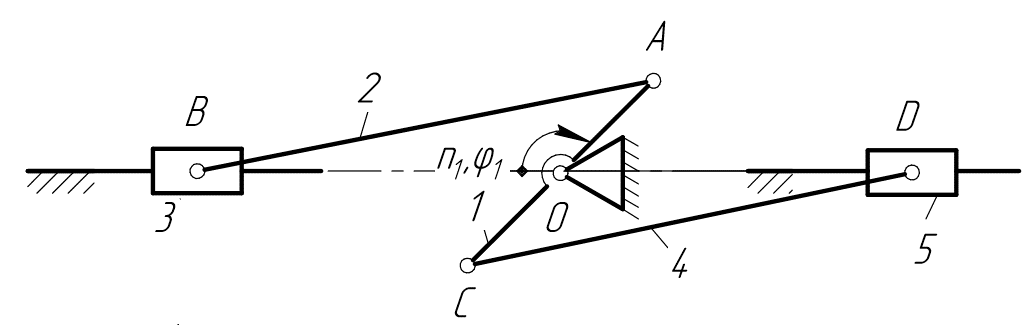
Рисунок 1 – Схема механизма
-
Структурный анализ механизма
Механизм состоит из пяти звеньев: кривошипа – 1, ползунов – 3,5, шатунов – 2,4. Звенья образуют семь кинематических пар: одного вращательного, два сложных, два поступательных.
Степень подвижности механизма:
 (1)
(1)
гдеn – число подвижных звеньев, n = 5;
р1 – число одноподвижных кинематических пар, р1 = 7;
р2 – число двухподвижных кинематических пар, р2 = 0.
Разложение механизма на структурные группы Ассура:
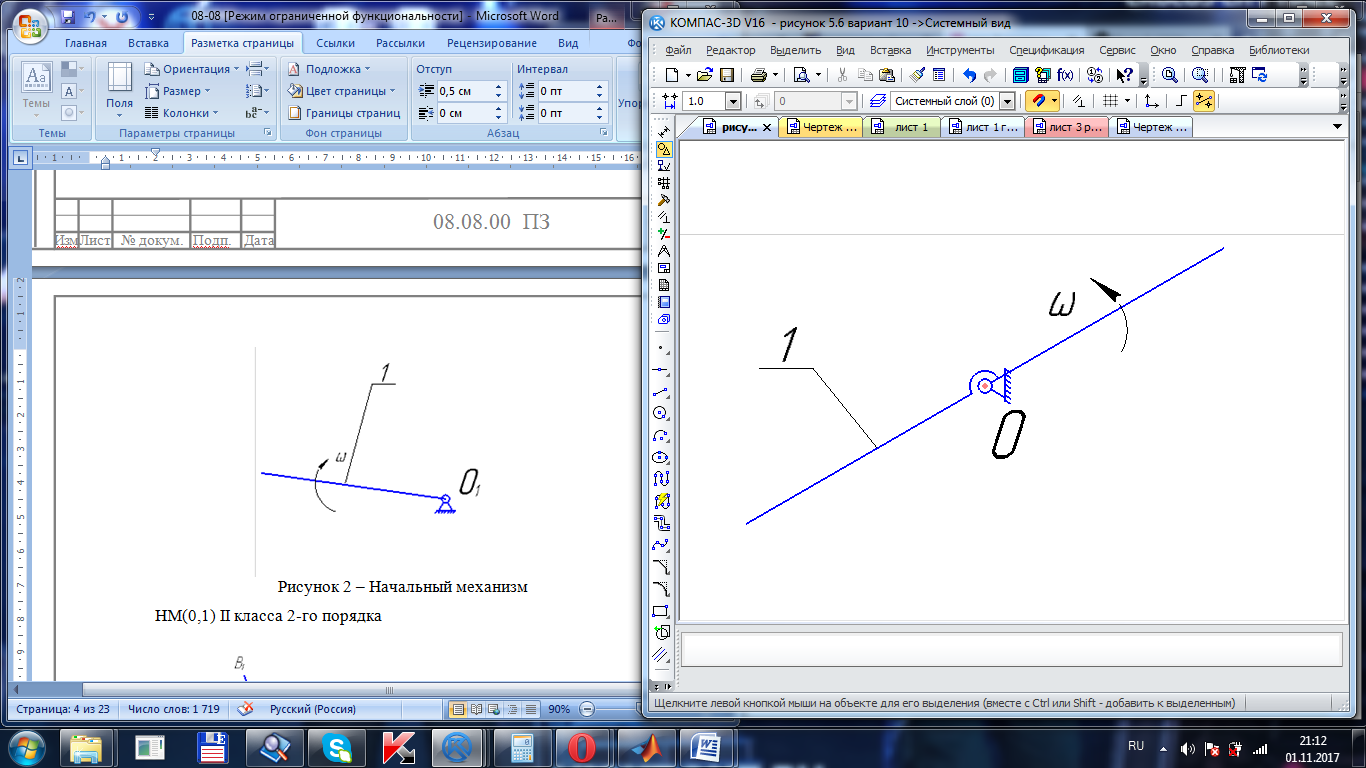
Рисунок 2 – Начальный механизм
НМ(0,1)II класса 2-го порядка
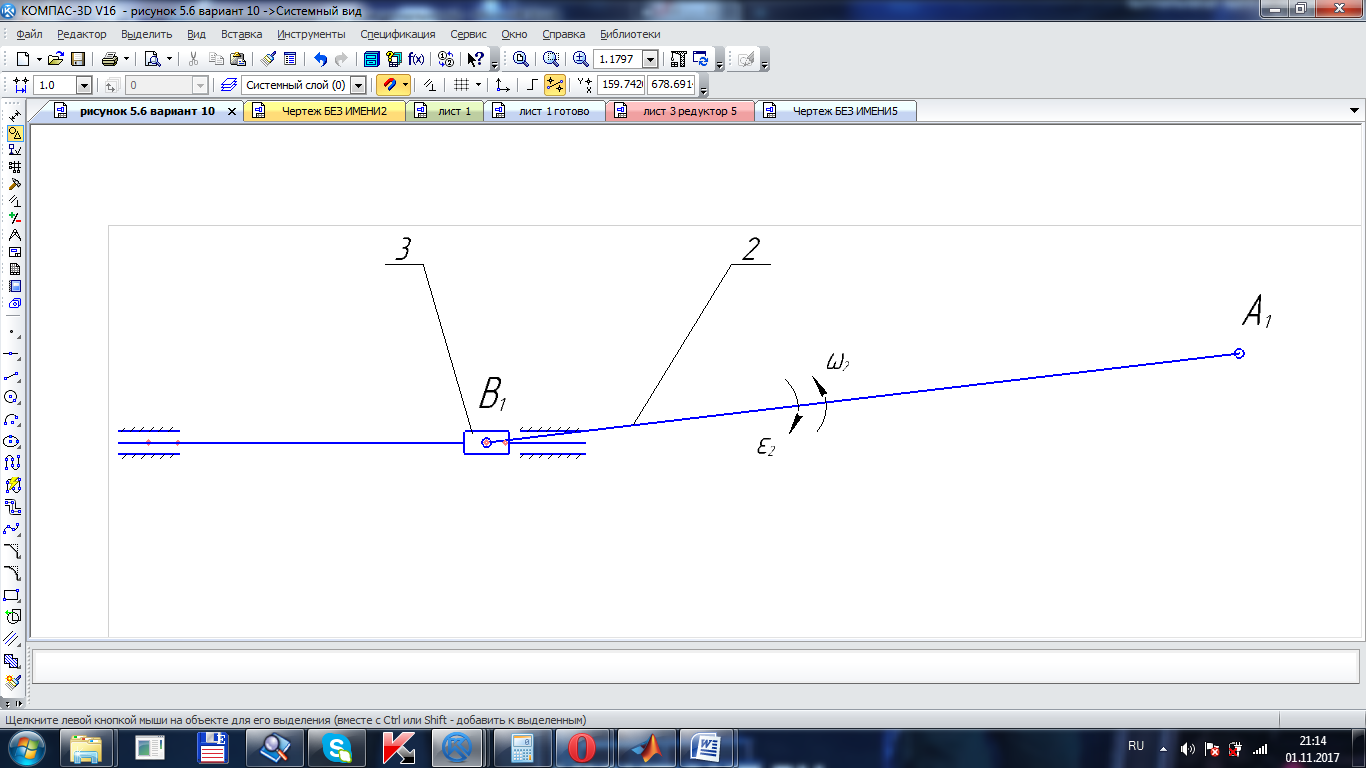
Рисунок 2 – Диада 2-3
Д(2,3)II класса 2-го порядка
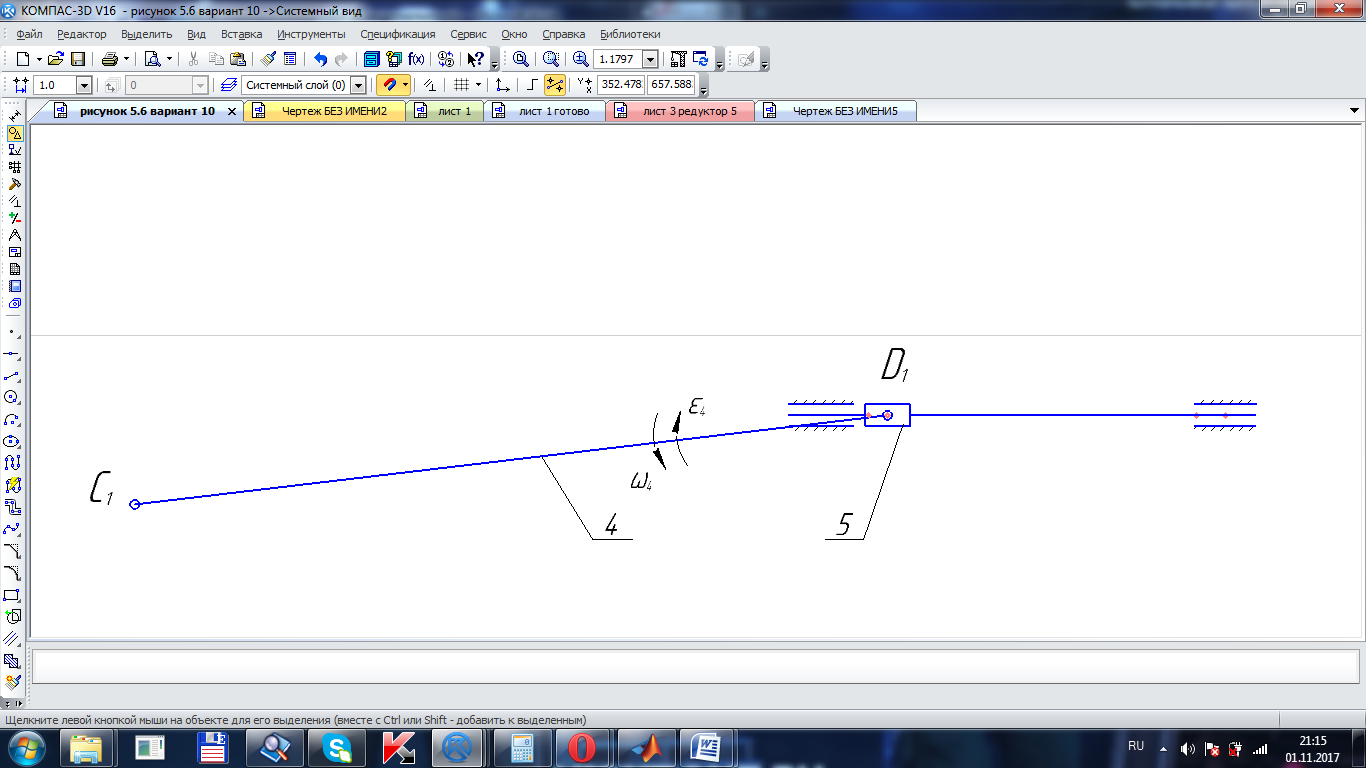
Рисунок 4 – Диада 4-5
Д(4,5)II класса 2-го порядка
Формула строения механизма: I(0,1)→II,2(2,4)→II,2(4,5).
Механизм 2 – го класса, 2 – го порядка.
Масштабный коэффициент длин Кl:


-
Определение скоростей
Расчёт скоростей выполняется для первого положения.
Частота вращения кривошипа: nкр= 5000 мин-1.
Угловая скорость кривошипа:

где ω1 – угловая скорость кривошипа, рад/с.
Скорость точки А:

где
 перпендикулярный
перпендикулярный в сторону вращения кривошипа.
в сторону вращения кривошипа.
Масштабный коэффициент скоростей:

где
 полюс плана скоростей.
полюс плана скоростей.
Скорость точки В решив на плане скоростей систему 2-ух векторных уравнений.
Система векторных уравнений точки B:

На плане
 =25,81 мм.
=25,81 мм.
Абсолютная величина скорости точкиB:

Скорость точки C определяем по свойству подобию:

Абсолютная величина скорости точки C:

Скорость точки D звеньев определяем решив на плане скоростей систему 2-ух векторных уравнений:

На плане
 мм
мм
Абсолютная величина скорости точки D:

Для всех остальных положений, скорости определяются аналогично. Полученные результаты сводим в таблицу 1.1
Таблица 1.1 – Значения скоростей
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
|
20,93 |
|||||||||||
|
|
12,9 |
20,61 |
20,92 |
15,6 |
8,03 |
0 |
12,9 |
20,56 |
20,9 |
15,6 |
8,03 |
0 |
|
|
20,93 |
20,93 |
20,93 |
20,9 |
20,93 |
20,93 |
20,9 |
20,93 |
20,9 |
20,9 |
20,9 |
20,9 |
|
|
12,9 |
20,61 |
20,92 |
15,6 |
8,03 |
0 |
12,9 |
20,56 |
20,9 |
15,6 |
8,03 |
0 |
|
|
18,29 |
10,76 |
0 |
10,8 |
18,3 |
20,92 |
18,3 |
10,76 |
0 |
10,8 |
18,3 |
20,9 |
|
|
18,29 |
10,76 |
0 |
10,8 |
18,3 |
20,92 |
18,3 |
10,76 |
0 |
10,8 |
18,3 |
20,9 |
 ,
м/с
,
м/с ,
м/с
,
м/с ,
м/с
,
м/с ,
м/с
,
м/с ,м/с
,м/с ,м/с
,м/с
1.3 Определение ускорений
Строим 7 планов ускорений для нечетных положений механизма и для 0-го положения. Подробный расчет ускорений производим для 1-го положения механизма.
Ускорение точки А определяем по формуле:

Выбираем масштабный коэффициент для построения плана ускорений:

Ускорение точки Bопределяется графическим решением системы уравнений:

Ускорение точки B определяем по формуле:

Ускорение точки Cопределяем по свойству подобию:

Ускорение точки С:

Ускорение точки D найдём решив систему уравнений:

Ускорение точки D:

Ускорение остальных положений определяем аналогично. Полученные значения сводим в таблицу 1.2:
Таблица 1.2 – Значения ускорений
|
Ускорение |
Величина ускорения, м/с2 |
|||||
|
1 |
3 |
5 |
7 |
9 |
11 |
|
|
|
10955 |
|||||
|
|
10970,2 |
3030,2 |
8004 |
8020 |
3044 |
10970 |
|
|
10955 |
10955 |
10955 |
10955 |
10955 |
10955 |
|
|
10970,2 |
3030,2 |
8004 |
8020 |
3044 |
10970 |
|
|
5674,2 |
0 |
2200 |
2215 |
0 |
2200 |
|
|
5674,2 |
0 |
2200 |
2215 |
0 |
2200 |
|
|
2200 |
11366 |
5674,2 |
5230,8 |
11412 |
5676 |
|
|
2200 |
11366 |
5674,2 |
5230,8 |
11412 |
5676 |








-
Диаграммы движения выходного звена
Кинематические диаграммы движения выходного звена 5 строим:
S-t по данным 12-ти планов положений механизма;
по данным 12-ти планов положений механизма;
V-t по данным планов скоростей;
по данным планов скоростей;
a-t по данным планов ускорений.
по данным планов ускорений.
Масштабные коэффициенты диаграмм:





-
Определение угловых скоростей и ускорений
Угловые скорости звеньев механизма:
Угловые ускорения:
1.6 Определение скоростей и ускорений центров масс звеньев


2 Силовой анализ механизма
Исходные данные:
Масса шатуна,

Масса шатуна,

Сила полезного сопротивления
