Файл: Курсовой проект по дисциплине Системы автоматики предприятий нефтегазовой отрасли по теме Автоматизация ректификационной колонны к2.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 06.02.2024
Просмотров: 82
Скачиваний: 1

СОДЕРЖАНИЕ
Повышение производительности труда обеспечивается за счет:
1) более полного использования календарного времени при автоматической работе оборудования;
3) высвобождения людей для выполнения другой, еще не автоматизированной работы.
2.1. Обоснование выбора новой структуры модернизируемой системы автоматизации
Рис.1. Структурная схема контура процесса автоматизации ректификационной колонны К-2
Р объем фракции на входе в контура;
WАР – передаточная функция автоматического регулятора;
WИМ – передаточная функция исполнительного механизма;
WРО – передаточная функция регулирующего органа;
WТОУ – передаточная функция технологического объекта управления;
WД – передаточная функция датчика;
Р’ – объем отбеинзининой фракции на выходе
Рис.2. Структурно-математическая схема контура автоматизации ректификационной колонны К-2.
-Передаточная функция датчика: Kg = 0,4.
-Передаточная функция регулируемого органа: 10/(0.15p+1)
-Передаточная функция исполнительного механизма:
Идентификация и объекта и оптимизация системы производится в среде Matlab Simulink.
2.2 Идентификация объекта автоматизации
Для объединения в единый файл исходных данных пользуются командой:
>> dan=iddata(y (901:1000), u (901:1000), Ts)
Вводим обозначения входных и выходных данных в структуру файла для наглядности:
>> dan.outputn = 'Температура ';
Воспользуемся следующими командами для указания размерностей параметров файла:
В конечном итоге сформированный файл данных dan.m имеет следующий вид:
SamplingInstants: [100x0 double]
Для графического представления данных (рис.6) воспользуемся командой
Рис.3. Исходные данные для идентификации ТОУ.
Проведем параметрическое оценивание моделей с помощью GUI, для этого вводим команду
В результате ее выполнения появляется диалоговое окно (рис. 4):
Рис.4 Диалоговое окно графического интерфейса
System Identification Toolbox.
Opening System Identification Tool ....... done.
Импортируем файл данных в среду интерфейса с помощью команды data – import
-удаление тренда из массива экспериментальных данных;
- формирование усеченных массивов данных с именами dande и dandv для построения моделей
Рис. 5. – Температура и давлении фракции внутри колонны
Рис. 6. Показатели адекватности моделей
den = 1.0000 -1.6976 0.9643 -0.1779
Discrete-time transfer function.
Ws = 0.02761 s^2 - 0.02182 s + 0.006256
Рис. 7. График переходных процессов модели
Определим частотные характеристики модели (рис. 8) с помощью команды:
Рис. 8. Частотные характеристики модели
Запас устойчивости по амплитуде:
Для построения АФХ (рис. 9) необходимо воспользоваться командой:
Рис. 9. Годограф АФХ с указанием значений запасов устойчивости
Определим ранг матрицы управляемости:
Определим матрицу наблюдаемости и ее ранг с помощью функций пакета Control System Toolbox:
Определим ранг матрицы наблюдаемости:
2.3 Оптимизация объекта автоматизации
2.3.1 Анализ показателей качества регулирования имеющейся системы
Wдатчика =0.4, Wрабочего органа=0.3/ (0.55p+1),
Wисполнительного механизма =10/ (0.15р+1).
W - передаточная функция исполнительного механизма;
• Время регулирования составляет – 34.7465 с
• Время нарастания – 30.8182 с
Рис.12 Амплитудно-частотная характеристика технологического процесса
Запас устойчивости по амплитуде – 25.5 дБ.
Запас устойчивости по фазе – 36.4 град
Рис.13. График АФЧХ системы без регулятора
2.3.2 Нахождение параметров ПД-регулятора
Рис. 14. Структурно-математическая схема в среде Matlab Simulink с регулятором.
Рис. 15. Графический расчет начальных параметров ПД-регуляторов.
Рис. 17. Иллюстрация оптимизации системы
После завершения процесса на экран выводятся найденные оптимальные значения параметров:
2.3.2Анализ показателей качества регулирования оптимизированной системы и ее устойчивости
Для начала построим график переходного процесса оптимизированной системы (рис. 18).
Рис. 18. Переходная характеристика оптимизированной системы
Рис. 19. Амплитудно-частотная и фазочастотная характеристика
Рис. 20. Амплитудно-фазовая частотная характеристика оптимизированный системы
2.4 Выбор современных технических средств автоматизации для системы АСР.
Контроллер ПЛК-73; для автоматизации локальных систем
Двухстрочный знакосинтезирующий дисплей.
Управление с лицевой панели прибора.
Входы: дискретные входы – 8, аналоговые входы – 8.
Выходы: 8, из них 4 – типа К (по умолчанию), 4 – любого типа, с возможностью установки ЦАП.
Интерфейсы: RS-485, RS-232, для расширения – 5 типов интерфейсных плат.
Поддержка протоколов: ModBus (RTU, ASCII), ОВЕН, GateWay.
В контроллере заложены достаточно мощные вычислительные ресурсы для
реализации простых систем автоматизации:
Высокопроизводительный процессор RISC архитектуры ARM7,
с частотой 50МГц компании Atmel.
Объем оперативной памяти для хранения переменных программ - 10Кбайт
Объем памяти хранения программ - 280Кбайт
Объем EEPROM для хранения Retain переменных - 448байт
Время цикла по умолчанию составляет 1мс при 50 логических операциях, при отсутствии сетевого обмена.
Текстовый монохромный ЖКИ с подсветкой - 2 строки по 16 символов,
вывода и задания значений параметров программы, информация о ходе процесса и сигнализация.
6 кнопок управления, для управления индикацией, заданием
Широкие возможности самодиагностики контроллера.
Встроенная батарея, позволяющая «пережидать» пропадание питания
выполнять программу при пропадании питания, и переводить выходные элементы в «безопасное состояние».
Встроенные часы реального времени.
Закрытые взрывобезопасные помещения или шкафы электрооборудования
без агрессивных паров и газов;
Расширенный температурный рабочий диапазон окружающего воздуха от -10 до +55 °C;
Верхний предел относительной влажности воздуха
- не более 80 % при температуре не более +35 °C и
более низких температурах без конденсации влаги;
Атмосферное давление от 84 до 106,7 кПа;
Степень защиты корпуса со стороны лицевой панели - IP20;
Высота над уровнем моря до 2000м.
По устойчивости к климатическим воздействиям при
эксплуатации контроллер ПЛК63/73 соответствует группе
исполнения В4 по ГОСТ 12997-84 и категорииУХЛ4 по ГОСТ 15150-69.
По устойчивости к механическим воздействиям при
эксплуатации контрол-лер ПЛК63/73 соответствует группе исполнения N2 по ГОСТ 12997-84.
По уровню излучения радиопомех (помехоэмиссии) контроллеры ПЛК63/73
соответствуют нормам, установленным для оборудования
класса Б по ГОСТ Р 51318.22 (СИСПР 22-97).
По уровню помехоустойчивости контроллеры
ПЛК73 соответствуют классу А по ГОСТ51522.
Контроллеры выполнены в компактном DIN-реечном корпусе с
габаритными размерами(Ш/В/Г):157/86/58.
Расширение количества точек ввода\вывода осуществляется путем подключения модуля МР1 или
внешних модулей ввода\вывода по любому из встроенных интерфейсов.
Переменный ток: (90-265)В, (47...63)Гц
Все дискретные входы контроллеров данной линейки могут работать с частотой 100Гц.
Универсальные аналоговые входы для подключения
широкого спектра датчиков: термосопротивлений,
термопар, унифицированных датчиков тока, напряжения,
сопротивления, либо работать в режиме
В зависимости от контроллера имеется от 4 до 5 «свободно выбираемых»
типа выходных элементов - в каждый из таких модулей может быть
установлен как релейный модуль, так и модуль выдачи аналогового сигнала.
В зависимости от контроллера устанавливается до двух последовательных
портов Так же в контроллерах данной линейки поддержана возможность
работы по любому нестандартному протоколу по любому из портов, что
позволяет подключать устройства с нестандартным протоколом (электро-,
газо-, водосчетчики, считыватели штрих - кодов и т.д.).
Программирование контроллеров осуществляется в профессиональной,
распространенной среде CoDeSys v.2.3.x, максимально соответствующей
Поддержка 5 языков программирования, для специалистов любой отрасли,
Мощное средство разработки и отладки комплексных проектов
автоматизации на базе контроллеров
Функции документирования проектов
Количество логических операций ограничивается только количеством
Программируются контроллеры данной линейки по интерфейсу Debug
Кабель для программирования идет в комплекте поставки
(для Debug RS-232), или используется стандартный кабель.
Отличительные особенности линейки:
Наличие средств индикации и управления непосредственно на самом контроллере
возможность кратковременного пережидания пропадания
элементов в безопасное состояние.
Для расчитываемой системы автоматического управления произведены следующие работы:
•Получена передаточная функция ТОУ.
•Построена функциональная схема процесса регулирования.
•Структурно-функциональная схема процесса регулирования САР.
•Алгоритмическая схема процесса регулирования САР.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
Структурно-математическая схема контура автоматизации ректификационной колонны К-2.
График АФЧХ системы без регулятора
Структурно-математическая схема в среде Matlab Simulink с ПИ-регулятором.
Переходная характеристика оптимизированной системы
Амплитудно-частотная и фазочастотная характеристика
Амплитудно-фазовая частотная характеристика оптимизированный системы
2. РАЗДЕЛ АВТОМАТИЗАЦИИ
2.1. Обоснование выбора новой структуры модернизируемой системы автоматизации
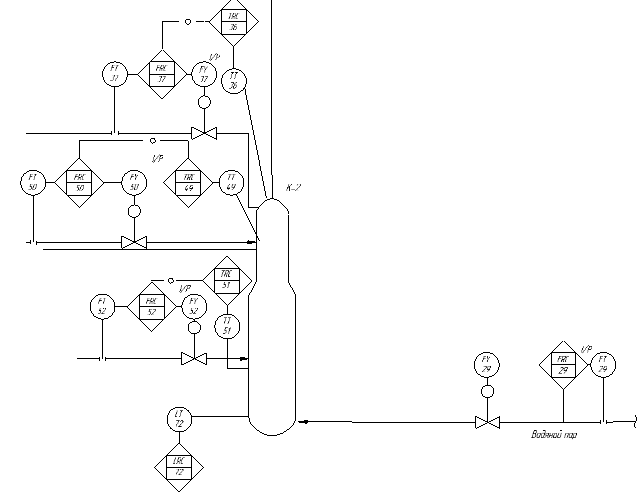
ЗТ – задатчик расхода;
-
АР – автоматический регулятор;
-
ИМ – исполнительный механизм;
-
РО – регулируемый орган;
-
ТОУ – технологический объект управления;
-
ДТ – датчик температуры;
-
Р – конечный расход сырьевой смеси.

Рис.1. Структурная схема контура процесса автоматизации ректификационной колонны К-2
В структурно-математическую схему контура процесса автоматизации автоматизации ректификационной колонны К-2
(рис.2):
Р объем фракции на входе в контура;
WАР – передаточная функция автоматического регулятора;
WИМ – передаточная функция исполнительного механизма;
WРО – передаточная функция регулирующего органа;
WТОУ – передаточная функция технологического объекта управления;
WД – передаточная функция датчика;
Р’ – объем отбеинзининой фракции на выходе
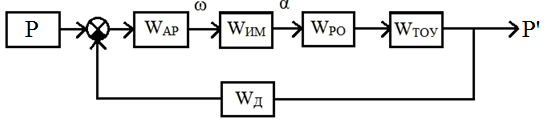
Рис.2. Структурно-математическая схема контура автоматизации ректификационной колонны К-2.
Передаточные функции исполнительного механизма, регулирующего органа и датчика нам известны. Они имеют следующий вид:
-Передаточная функция датчика: Kg = 0,4.
-Передаточная функция регулируемого органа:  10/(0.15p+1)
10/(0.15p+1)
-Передаточная функция исполнительного механизма: 
Неизвестными являются передаточные функции автоматического регулятора WАР и технологического объекта управления WТОУ.
Можно выдвинуть предположение, что имеющаяся система имеет недостатки, не позволяющие достигнуть максимальной экономической выгоды в ходе проведения процесса риформинга. Для выяснения этого необходимо найти передаточную функцию технологического объекта управления WТОУ путем проведения идентификации объекта ипровести для него анализ показателей качества. В случае несоответствия параметров системы заданным требованиям, провести оптимизацию системы путем нахождения параметров автоматического регулятора WАР.Идентификация и объекта и оптимизация системы производится в среде Matlab Simulink.
2.2 Идентификация объекта автоматизации
Параметрическая идентификация объектов автоматизации технологических процессов производится с использованием пакетов расширения MATLAB System Identification Toolbox и Control System Toolbox. Экспериментальные данные процесса гидрокрекинга в реакторном блоке первой ступени заносятся в файл datta. Данные состоят из входных и выходных параметров системы. Входные параметры – подача дизельного топлива. Выходные параметры – температура отбинзининой нефти.В рабочую область MATLAB сначала загрузим исходные данные для составления файла данных с помощью команды:
>> load datta
В результате выполнения команды в рабочей области появились массив входных переменных u и массив выходного параметра y. Интервал дискретизации указывается дополнительно:
>> Ts=3;
Для объединения в единый файл исходных данных пользуются командой:
>> dan=iddata(y (901:1000), u (901:1000), Ts)
Вводим обозначения входных и выходных данных в структуру файла для наглядности:
>> dan.inputn = 'Мощность';
>> dan.outputn = 'Температура ';
Воспользуемся следующими командами для указания размерностей параметров файла:
>> dan.inputUnit = '%';
>> dan.outputUnit = 'гр.С';
В конечном итоге сформированный файл данных dan.m имеет следующий вид:

Domain: 'Time'
Name: ''
OutputData: [100x1 double]
y: 'Same as OutputData'
OutputName: {'Температура'}
OutputUnit: {'гр.С'}
InputData: [100x1 double]
u: 'Same as InputData'
InputName: {'Мощность '}
InputUnit: { '%' }
Period: Inf
InterSample: 'zoh'
Ts: 3
Tstart: []
SamplingInstants: [100x0 double]
TimeUnit: ''
ExperimentName: 'Exp1'
Notes: {}
UserData: []
Для графического представления данных (рис.6) воспользуемся командой
>>plot(dan)

Рис.3. Исходные данные для идентификации ТОУ.
Проведем параметрическое оценивание моделей с помощью GUI, для этого вводим команду
>> ident
В результате ее выполнения появляется диалоговое окно (рис. 4):
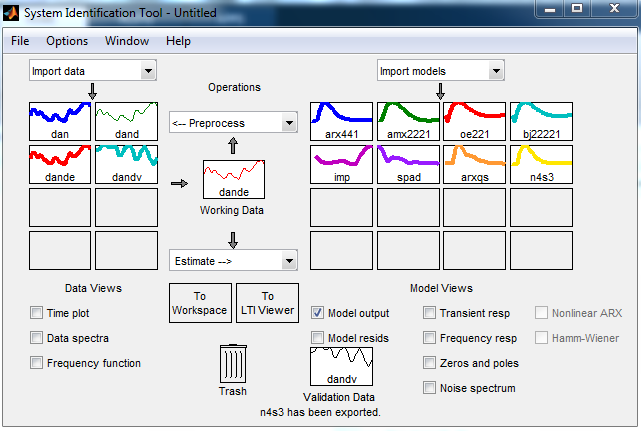
Рис.4 Диалоговое окно графического интерфейса
System Identification Toolbox.
Данные операции проведем в графическом интерфейсе System Identification Toolbox, который запускается из командной строки командой:
>> ident
Opening System Identification Tool ....... done.
Импортируем файл данных в среду интерфейса с помощью команды data – import
Запустим режим быстрого старта, для чего в падающем меню Operations выберем Quick Start. При выборе этого режима производится:
-удаление тренда из массива экспериментальных данных;
- формирование усеченных массивов данных с именами dande и dandv для построения моделей
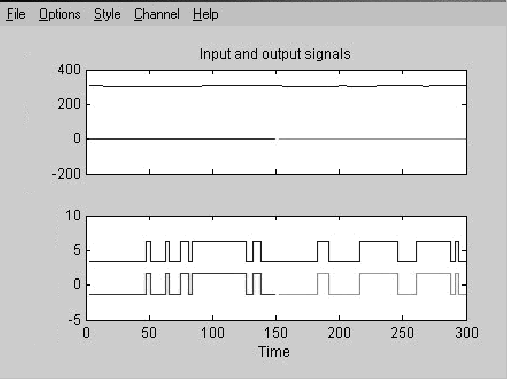
Рис. 5. – Температура и давлении фракции внутри колонны
, 
Рис. 6. Показатели адекватности моделей
Для анализа модели ТОУ возьмем модель n4s3 , для чего перетащим ее на иконку To Workspace, при этом модель n4s3 появится в рабочем пространстве MATLAB.
Полученная модель представлена в так называемом тета – формате и является дискретной. Для преобразования модели из тета - формата в вид удобный для дальнейшего использования в пакете System Identification Toolbox имеются специальные функции.Преобразуем модель тета - формата многомерного объекта в вектор передаточных функций, связанных с выбранным входом:
>> [num,den]=th2tf(n4s3)
num =0 -0.0036 0.0052 0.0729
den = 1.0000 -1.6976 0.9643 -0.1779
>> Wz=tf(num,den,Ts)
Wz =-0.05999 z^2 + 0.04869 z + 0.01253
---------------------------------
z^5 - 1.251 z^4 + 0.3763 z^3к
Sample time: 3 seconds
Discrete-time transfer function.
>> Ws=d2c(wz)
Ws = 0.02761 s^2 - 0.02182 s + 0.006256
Transfer function:
0.3928 s^2 - 0.1036 s + 0.2589
---------------------------------
s^3 + 12.4 s^2 + 3.955 s + 0.2669
.>> step(Ws)
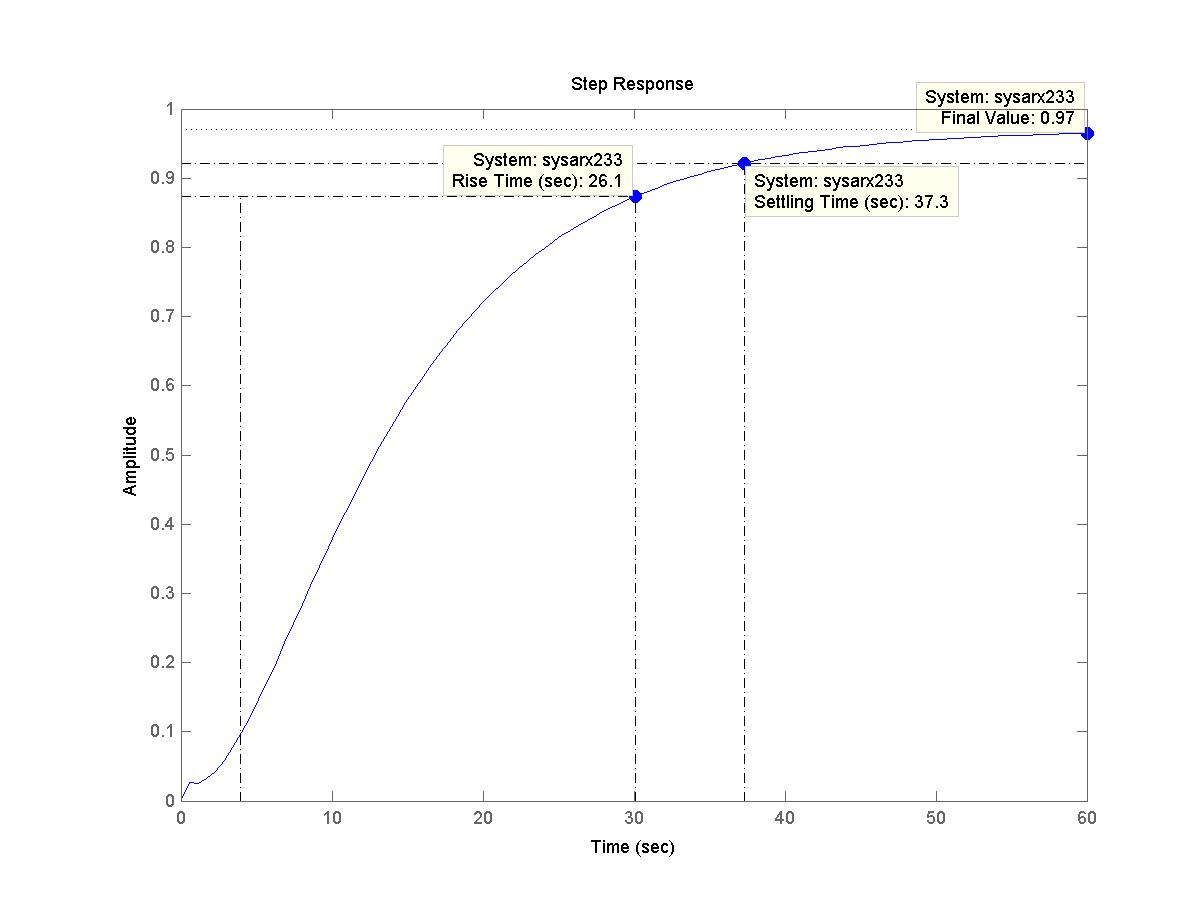
Рис. 7. График переходных процессов модели
Определим частотные характеристики модели (рис. 8) с помощью команды:
>> bode(Ws)

Рис. 8. Частотные характеристики модели
Запас устойчивости по амплитуде:
* Для непрерывной: 9.68 dB.
Значения запасов устойчивости можно определить также и в режиме командной строки MATLAB с помощью команд:
>> [Gm,Pm,Wcg,Wcp]=margin(Ws)
Gm = 34.7465
Pm = Inf
Wcg = 0.5964
Wcp = NaN