Файл: Курсовой проект по дисциплине Системы автоматики предприятий нефтегазовой отрасли по теме Автоматизация ректификационной колонны к2.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 06.02.2024
Просмотров: 79
Скачиваний: 1

СОДЕРЖАНИЕ
Повышение производительности труда обеспечивается за счет:
1) более полного использования календарного времени при автоматической работе оборудования;
3) высвобождения людей для выполнения другой, еще не автоматизированной работы.
2.1. Обоснование выбора новой структуры модернизируемой системы автоматизации
Рис.1. Структурная схема контура процесса автоматизации ректификационной колонны К-2
Р объем фракции на входе в контура;
WАР – передаточная функция автоматического регулятора;
WИМ – передаточная функция исполнительного механизма;
WРО – передаточная функция регулирующего органа;
WТОУ – передаточная функция технологического объекта управления;
WД – передаточная функция датчика;
Р’ – объем отбеинзининой фракции на выходе
Рис.2. Структурно-математическая схема контура автоматизации ректификационной колонны К-2.
-Передаточная функция датчика: Kg = 0,4.
-Передаточная функция регулируемого органа: 10/(0.15p+1)
-Передаточная функция исполнительного механизма:
Идентификация и объекта и оптимизация системы производится в среде Matlab Simulink.
2.2 Идентификация объекта автоматизации
Для объединения в единый файл исходных данных пользуются командой:
>> dan=iddata(y (901:1000), u (901:1000), Ts)
Вводим обозначения входных и выходных данных в структуру файла для наглядности:
>> dan.outputn = 'Температура ';
Воспользуемся следующими командами для указания размерностей параметров файла:
В конечном итоге сформированный файл данных dan.m имеет следующий вид:
SamplingInstants: [100x0 double]
Для графического представления данных (рис.6) воспользуемся командой
Рис.3. Исходные данные для идентификации ТОУ.
Проведем параметрическое оценивание моделей с помощью GUI, для этого вводим команду
В результате ее выполнения появляется диалоговое окно (рис. 4):
Рис.4 Диалоговое окно графического интерфейса
System Identification Toolbox.
Opening System Identification Tool ....... done.
Импортируем файл данных в среду интерфейса с помощью команды data – import
-удаление тренда из массива экспериментальных данных;
- формирование усеченных массивов данных с именами dande и dandv для построения моделей
Рис. 5. – Температура и давлении фракции внутри колонны
Рис. 6. Показатели адекватности моделей
den = 1.0000 -1.6976 0.9643 -0.1779
Discrete-time transfer function.
Ws = 0.02761 s^2 - 0.02182 s + 0.006256
Рис. 7. График переходных процессов модели
Определим частотные характеристики модели (рис. 8) с помощью команды:
Рис. 8. Частотные характеристики модели
Запас устойчивости по амплитуде:
Для построения АФХ (рис. 9) необходимо воспользоваться командой:
Рис. 9. Годограф АФХ с указанием значений запасов устойчивости
Определим ранг матрицы управляемости:
Определим матрицу наблюдаемости и ее ранг с помощью функций пакета Control System Toolbox:
Определим ранг матрицы наблюдаемости:
2.3 Оптимизация объекта автоматизации
2.3.1 Анализ показателей качества регулирования имеющейся системы
Wдатчика =0.4, Wрабочего органа=0.3/ (0.55p+1),
Wисполнительного механизма =10/ (0.15р+1).
W - передаточная функция исполнительного механизма;
• Время регулирования составляет – 34.7465 с
• Время нарастания – 30.8182 с
Рис.12 Амплитудно-частотная характеристика технологического процесса
Запас устойчивости по амплитуде – 25.5 дБ.
Запас устойчивости по фазе – 36.4 град
Рис.13. График АФЧХ системы без регулятора
2.3.2 Нахождение параметров ПД-регулятора
Рис. 14. Структурно-математическая схема в среде Matlab Simulink с регулятором.
Рис. 15. Графический расчет начальных параметров ПД-регуляторов.
Рис. 17. Иллюстрация оптимизации системы
После завершения процесса на экран выводятся найденные оптимальные значения параметров:
2.3.2Анализ показателей качества регулирования оптимизированной системы и ее устойчивости
Для начала построим график переходного процесса оптимизированной системы (рис. 18).
Рис. 18. Переходная характеристика оптимизированной системы
Рис. 19. Амплитудно-частотная и фазочастотная характеристика
Рис. 20. Амплитудно-фазовая частотная характеристика оптимизированный системы
2.4 Выбор современных технических средств автоматизации для системы АСР.
Контроллер ПЛК-73; для автоматизации локальных систем
Двухстрочный знакосинтезирующий дисплей.
Управление с лицевой панели прибора.
Входы: дискретные входы – 8, аналоговые входы – 8.
Выходы: 8, из них 4 – типа К (по умолчанию), 4 – любого типа, с возможностью установки ЦАП.
Интерфейсы: RS-485, RS-232, для расширения – 5 типов интерфейсных плат.
Поддержка протоколов: ModBus (RTU, ASCII), ОВЕН, GateWay.
В контроллере заложены достаточно мощные вычислительные ресурсы для
реализации простых систем автоматизации:
Высокопроизводительный процессор RISC архитектуры ARM7,
с частотой 50МГц компании Atmel.
Объем оперативной памяти для хранения переменных программ - 10Кбайт
Объем памяти хранения программ - 280Кбайт
Объем EEPROM для хранения Retain переменных - 448байт
Время цикла по умолчанию составляет 1мс при 50 логических операциях, при отсутствии сетевого обмена.
Текстовый монохромный ЖКИ с подсветкой - 2 строки по 16 символов,
вывода и задания значений параметров программы, информация о ходе процесса и сигнализация.
6 кнопок управления, для управления индикацией, заданием
Широкие возможности самодиагностики контроллера.
Встроенная батарея, позволяющая «пережидать» пропадание питания
выполнять программу при пропадании питания, и переводить выходные элементы в «безопасное состояние».
Встроенные часы реального времени.
Закрытые взрывобезопасные помещения или шкафы электрооборудования
без агрессивных паров и газов;
Расширенный температурный рабочий диапазон окружающего воздуха от -10 до +55 °C;
Верхний предел относительной влажности воздуха
- не более 80 % при температуре не более +35 °C и
более низких температурах без конденсации влаги;
Атмосферное давление от 84 до 106,7 кПа;
Степень защиты корпуса со стороны лицевой панели - IP20;
Высота над уровнем моря до 2000м.
По устойчивости к климатическим воздействиям при
эксплуатации контроллер ПЛК63/73 соответствует группе
исполнения В4 по ГОСТ 12997-84 и категорииУХЛ4 по ГОСТ 15150-69.
По устойчивости к механическим воздействиям при
эксплуатации контрол-лер ПЛК63/73 соответствует группе исполнения N2 по ГОСТ 12997-84.
По уровню излучения радиопомех (помехоэмиссии) контроллеры ПЛК63/73
соответствуют нормам, установленным для оборудования
класса Б по ГОСТ Р 51318.22 (СИСПР 22-97).
По уровню помехоустойчивости контроллеры
ПЛК73 соответствуют классу А по ГОСТ51522.
Контроллеры выполнены в компактном DIN-реечном корпусе с
габаритными размерами(Ш/В/Г):157/86/58.
Расширение количества точек ввода\вывода осуществляется путем подключения модуля МР1 или
внешних модулей ввода\вывода по любому из встроенных интерфейсов.
Переменный ток: (90-265)В, (47...63)Гц
Все дискретные входы контроллеров данной линейки могут работать с частотой 100Гц.
Универсальные аналоговые входы для подключения
широкого спектра датчиков: термосопротивлений,
термопар, унифицированных датчиков тока, напряжения,
сопротивления, либо работать в режиме
В зависимости от контроллера имеется от 4 до 5 «свободно выбираемых»
типа выходных элементов - в каждый из таких модулей может быть
установлен как релейный модуль, так и модуль выдачи аналогового сигнала.
В зависимости от контроллера устанавливается до двух последовательных
портов Так же в контроллерах данной линейки поддержана возможность
работы по любому нестандартному протоколу по любому из портов, что
позволяет подключать устройства с нестандартным протоколом (электро-,
газо-, водосчетчики, считыватели штрих - кодов и т.д.).
Программирование контроллеров осуществляется в профессиональной,
распространенной среде CoDeSys v.2.3.x, максимально соответствующей
Поддержка 5 языков программирования, для специалистов любой отрасли,
Мощное средство разработки и отладки комплексных проектов
автоматизации на базе контроллеров
Функции документирования проектов
Количество логических операций ограничивается только количеством
Программируются контроллеры данной линейки по интерфейсу Debug
Кабель для программирования идет в комплекте поставки
(для Debug RS-232), или используется стандартный кабель.
Отличительные особенности линейки:
Наличие средств индикации и управления непосредственно на самом контроллере
возможность кратковременного пережидания пропадания
элементов в безопасное состояние.
Для расчитываемой системы автоматического управления произведены следующие работы:
•Получена передаточная функция ТОУ.
•Построена функциональная схема процесса регулирования.
•Структурно-функциональная схема процесса регулирования САР.
•Алгоритмическая схема процесса регулирования САР.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
Структурно-математическая схема контура автоматизации ректификационной колонны К-2.
График АФЧХ системы без регулятора
Структурно-математическая схема в среде Matlab Simulink с ПИ-регулятором.
Переходная характеристика оптимизированной системы
Амплитудно-частотная и фазочастотная характеристика
Амплитудно-фазовая частотная характеристика оптимизированный системы
Для определения запасов устойчивости в логарифмическом масштабе необходимо выполнить следующие операции:
>> Gmlog=20*log10(Gm)
Gmlog = 30.8182
Для построения АФХ (рис. 9) необходимо воспользоваться командой:
>> nyquist(Ws)
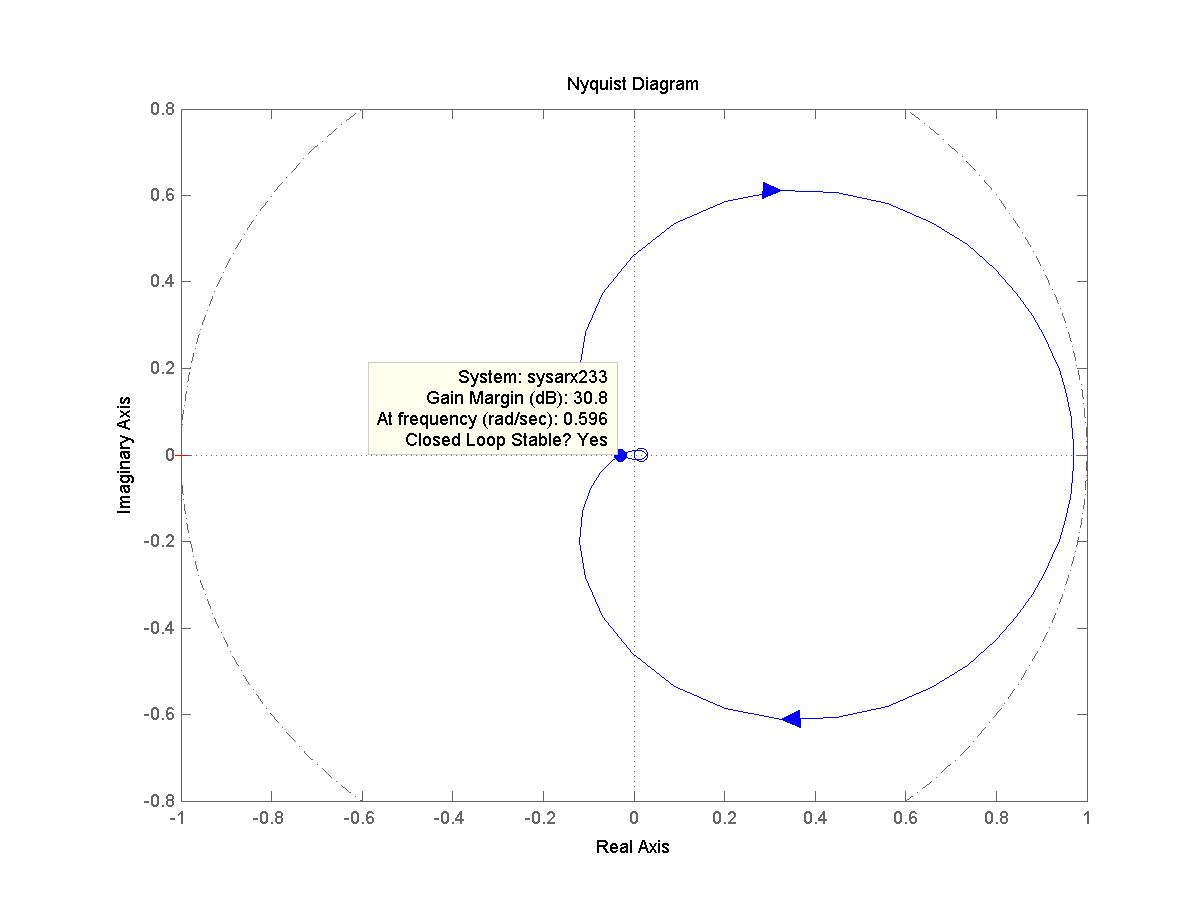
Рис. 9. Годограф АФХ с указанием значений запасов устойчивости
для непрерывной модели
Критерием управляемости линейных стационарных объектов является условие: для того чтобы объект был вполне управляем, необходимо и достаточно, чтобы ранг матрицы управляемости равнялся размерности вектора состояний n .Для того, чтобы воспользоваться этой функцией необходимо вычислить матрицы A, B, C, D с помощью команды:
>> [A, B, C, D] = ssdata (sysarx233)
A =
-12.3970 -0.9887 -0.0334
4.0000 0 0
0 2.0000 0
B = 0.5000
0
0
C = 0.7857 -0.0518 0.0647
D = 0
Вычислим матрицу управляемости:
>> Mu=ctrb (A, B)
Mu =
0.5000 -6.1985 74.8659
0 2.0000 -24.7941
0 0 4.0000
Определим ранг матрицы управляемости:
>> nMu=rank(Mu)
nMu = 3
Определим ранг матрицы управляемости:
>> n=rank(Mu)
n = 3
Критерием наблюдаемости линейных стационарных объектов является условие: для того, чтобы объект был вполне наблюдаемым, необходимо и достаточно, чтобы ранг матрицы наблюдаемости равнялся размерности вектора состояния.Определим матрицу наблюдаемости и ее ранг с помощью функций пакета Control System Toolbox:
>> My=obsv(A,C)
My =
0.7857 -0.0518 0.0647
-9.9473 -0.6473 -0.0262
120.7278 9.7820 0.3318
Определим ранг матрицы наблюдаемости:
>> n=rank(Mu)
n = 3
В конечном счете для исследуемой модели объекта размерность вектора состояний, определяемая размером матриц A и С, равна 3 и ранг матрицы наблюдаемости MY также равен 3, что позволяет сделать вывод о том, что объект автоматизации является вполне наблюдаемым, т.е. для него всегда можно определить по значениям выходной величины y(t) вектор переменных состояния, необходимый для синтеза системы управления.2.3 Оптимизация объекта автоматизации
2.3.1 Анализ показателей качества регулирования имеющейся системы
В ходе проведения идентификации была определена передаточная функция технологического объекта управления WТОУ , а так же проведен анализ показателей качества объекта автоматизации.
Следующим этапом является оптимизация системы путем нахождения параметров автоматического регулятора WАР. Для этого в среде Matlab Simulink собирается структурно-математическая схема без автоматического регулятора (рис. 20), для того, чтобы определить показатели качества переходного процесса и сделать вывод о необходимости внедрения регулятора.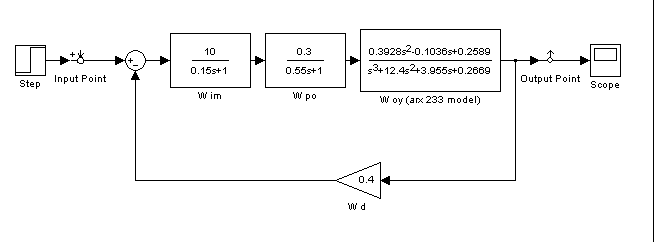
Рис. 10. Структурно-математическая схема технологического процесса без автоматического регулятора в среде Matlab Simulink.
Wдатчика =0.4, Wрабочего органа=0.3/ (0.55p+1),
Wисполнительного механизма =10/ (0.15р+1).
W - передаточная функция исполнительного механизма;
- передаточная функция исполнительного механизма;
 0.05999 z^2 + 0.04869 z + 0.01253
0.05999 z^2 + 0.04869 z + 0.01253---------------------------------
z^5 - 1.251 z^4 + 0.3763 z^3
Передаточная функция технологического объекта регулирования.
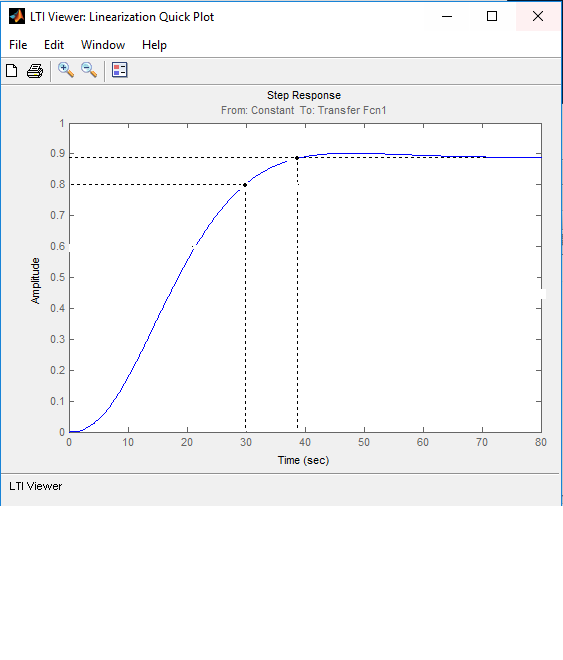
Рис. 11 Переходная характеристика технологического процесса
Переходная характеристика:
• Время регулирования составляет – 34.7465 с
• Время нарастания – 30.8182 с
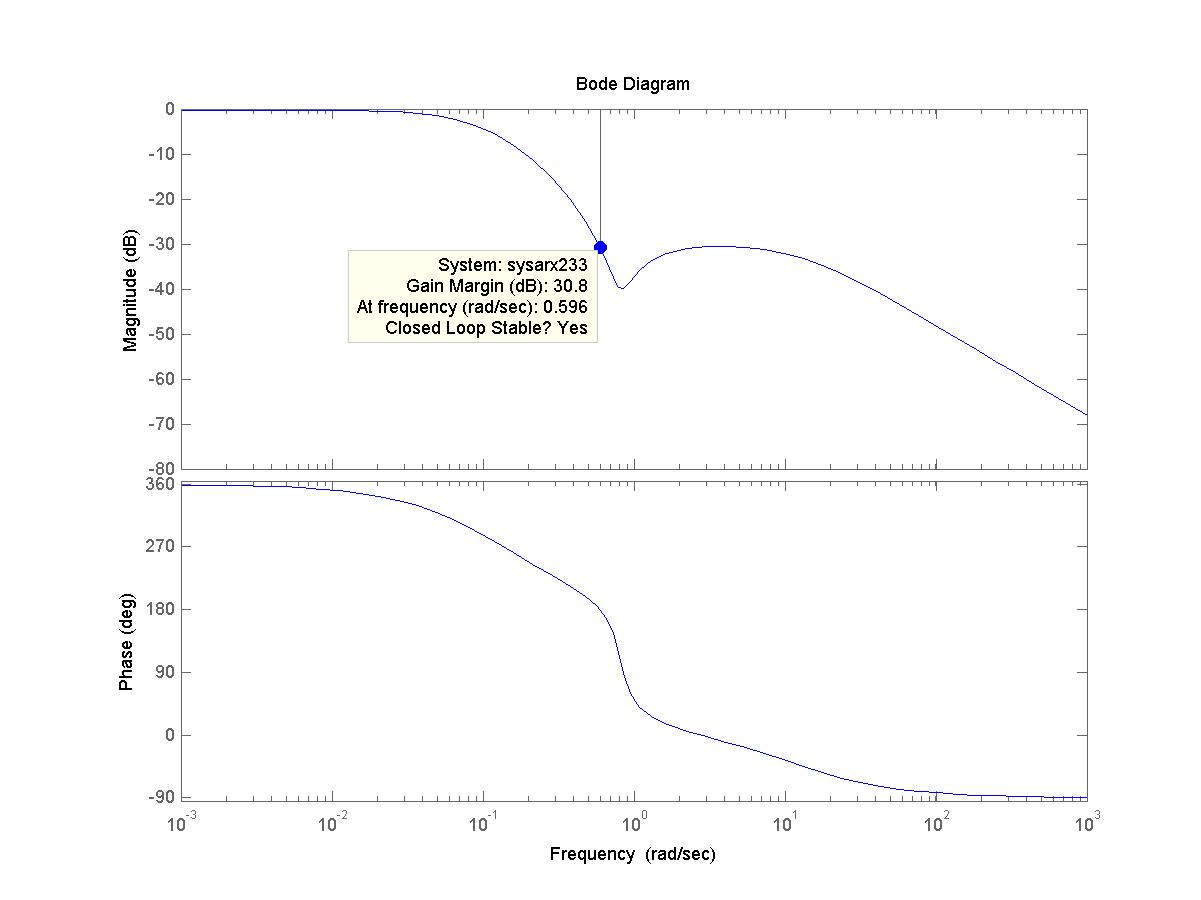
Рис.12 Амплитудно-частотная характеристика технологического процесса
Частотная характеристика:
Запас устойчивости по амплитуде – 25.5 дБ.

Запас устойчивости по фазе – 36.4 град
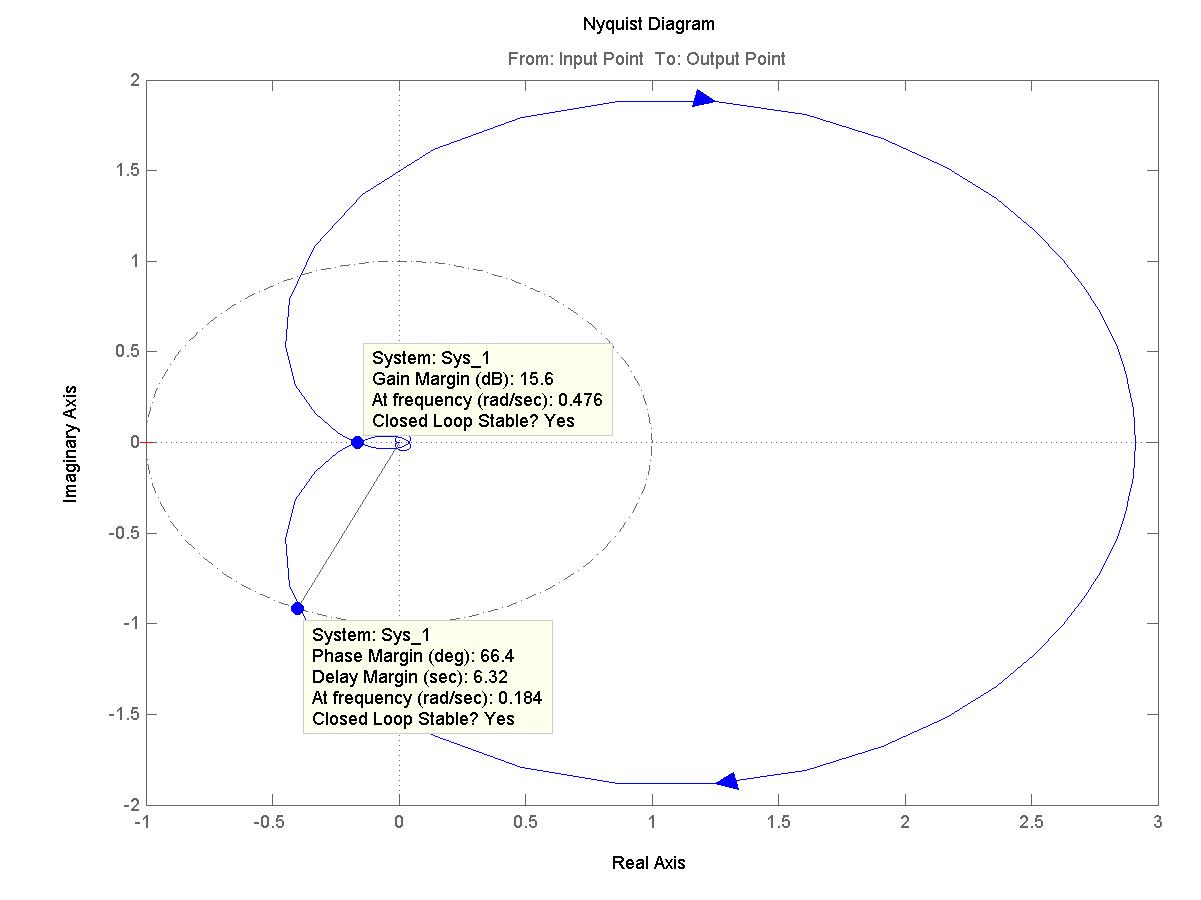
Рис.13. График АФЧХ системы без регулятора
2.3.2 Нахождение параметров ПД-регулятора
В среде Matlab Simulink собирается структурно-математическая схема с автоматическим регулятором (рис.15), которой на схеме обозначен как Subsistem. В данном случае будет использоваться ПД (пропорционально -дифференциальный) регулятор. Так же добавляется блок Signal Constrain. Для более качественного процесса оптимизации внедрим в отрицательную обратную связь еще одно усилительное звено (помимо передаточной функции датчика kd) и назовем его kg. В конечном итоге после проведения оптимизации мы получим оптимальные значения параметров ПИД-регулятора Kp, Kd, а так же оптимальное значение kg.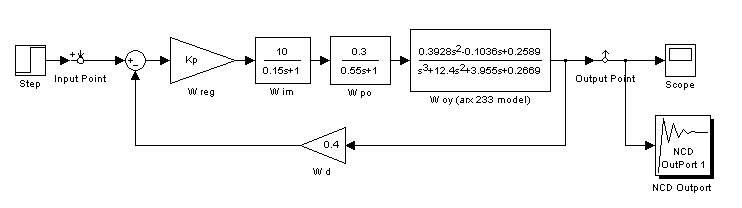
Рис. 14. Структурно-математическая схема в среде Matlab Simulink с регулятором.
Для проведения оптимизации необходимо по графику переходного процесса передаточной функции технологического объекта управления WТОУ, найденного в ходе идентификации, рассчитать начальные значения ПД-регулятора, а конкретно Kp, Kd. На графике переходного процесса проводится касательная, далее рассчитываются параметры τ и Т0 исходя из графика (рис. 15).
Рис. 15. Графический расчет начальных параметров ПД-регуляторов.
По виду переходной характеристики можно определить показатели качества переходного процесса:
-
Время регулирования составляет 19.1 с.
-
Установившееся значение – 1
-
Время нарастания – 13.5 с.
-
Статическая ошибка – 0
-
Перерегулирование - 1.7
Полученные значения параметров регулятора заносим в Workspace и запускаем систему. После этого открываем NCD блок. В окне настройки оптимизируемых параметров задаем Kp, , Kd, и kg .
Затем в окне настройки параметров оптимизируемой системы NCD блока виде ограничительных прямых задаем требования к показателям качества регулирования: максимальное перерегулирование – не более 10%, Время регулирования – не более 40 с, время нарастания – не более 15 с. Производим запуск NCD блока. В результате происходит оптимизация заданных параметров системы (рис. 16).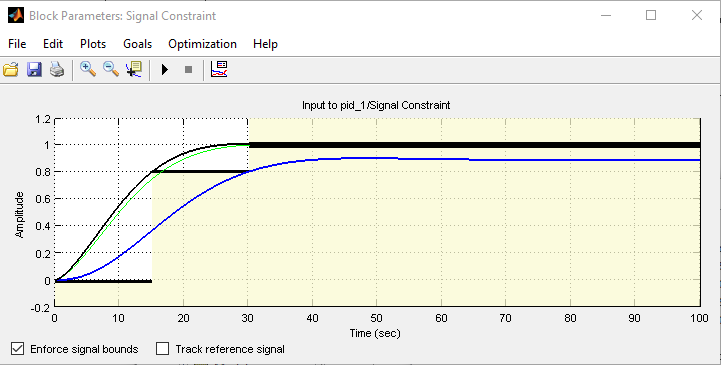
Рис. 17. Иллюстрация оптимизации системы
После завершения процесса на экран выводятся найденные оптимальные значения параметров:
2.3.2Анализ показателей качества регулирования оптимизированной системы и ее устойчивости
После нахождения оптимальных параметров ПД-регулятора, таких как Kp, Ki и Kd, и значения kn, необходимо проанализировать устойчивость работы системы, переходный процесс и других характеристики, определяющие качество и надежность работы системы автоматизации.Для начала построим график переходного процесса оптимизированной системы (рис. 18).

Рис. 18. Переходная характеристика оптимизированной системы
По виду переходной характеристики можно определить показатели качества переходного процесса:
-
Время регулирования составляет 19.1 с.
-
Установившееся значение – 1
-
Время нарастания – 13.5 с.
-
Статическая ошибка – 0 -
Перерегулирование - 1.7 %
. Далее построим амплитудно-частотную (АЧХ) и фазочастотную характеристики (ФЧХ) и выявим запасы устойчивости по амплитуде и фазе. (рис. 19)

Рис. 19. Амплитудно-частотная и фазочастотная характеристика
оптимизированной системы
Запас устойчивостипо амплитуде составляет 20.4 дБ, полученные данные удлетворяют заданным требованиям к показателям качества регулирования.
Так же построим амплитудно-фазовую частотную характеристику (АФЧХ) оптимизированный системы (рис. 20).
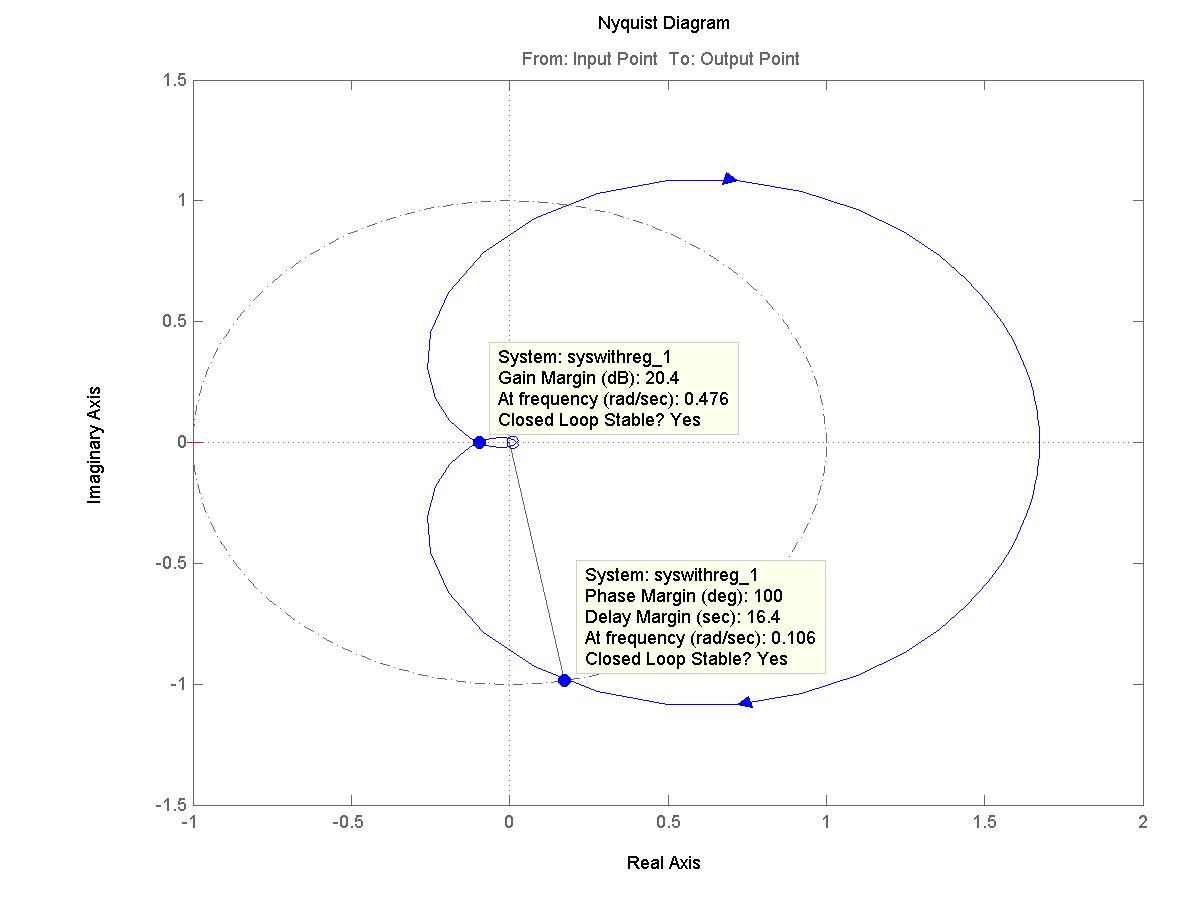
Рис. 20. Амплитудно-фазовая частотная характеристика оптимизированный системы
В заключении сравним показатели качества системы до и после оптимизации, а так же с заданными требованиями к показателям качества регулирования. Результаты сравнения приведены в таблице 1.
Таблица 1
Показатель | Значения до оптимизации | Значения после оптимизации | требования |
МаксимальноеПеререгулирование,% | 12.3 | 1.7 | Не более 10 |
Время регулирования,с | 34.7 | 19.1 | Не более 50 |
Время нарастания,с | 30.8 | 13.5 | Не более 15 |
Запас устойчивости по амплитуде,Дб | 25.5 | 20.4 | Не менее 10 |
Запас устойчивости по фазе,град | 79.4 | 75.5 | От 30 до 80 |
Статистическая ошибка,% | 8.7 | 0 | Не более 5 |
2.4 Выбор современных технических средств автоматизации для системы АСР.
Контроллер ПЛК-73; для автоматизации локальных систем
Двухстрочный знакосинтезирующий дисплей.
Управление с лицевой панели прибора.