ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 02.02.2024
Просмотров: 646
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
3. Описание и классификация активных фильтров. Фильтр нижних частот.
4. Описание и классификация активных фильтров. Фильтр верхних частот.
5. Описание и классификация активных фильтров. Полосовые фильтры.
9. Генераторы гармонических сигналов. Теоретические сведения. Принцип работы. Генератор Буббы.
6 – 10 вопросы. Заключение по всем генераторам.
14. Принципы автоматического управления. Общие сведения о структурах систем управления. Регуляторы.
15. Электрический ток в вакууме. Вакуумный диод. Вакуумный триод.
, KD – коэффициенты пропорционального, интегрального и дифференциального звеньев; e(t) – ошибка рассогласования.
При программной реализации ПИД-регулятора вычисления выходного сигнала происходят через равные промежутки времени, т.е. регулятор является дискретным по времени.
Составляющие ПИД регулятора.
Выходной сигнал ПИД регулятора – это сумма трех составляющих:
Пропорциональная составляющая.
Пропорциональная составляющая не имеет памяти, т.е. значение выходного сигнала не зависит от предыдущего состояния системы. Просто ошибка рассогласования, умноженная на коэффициент, передается на выход. Выходной сигнал компенсирует отклонение регулируемого параметра. Сигнал тем больше, чем больше ошибка рассогласования. При ошибке равной 0, сигнал на выходе тоже равен 0.
Иначе говоря, берем значение нужной нам температуры (уставку) и вычитаем из него значение текущей температуры. Получаем рассогласование (невязку). Умножаем полученную невязку на коэффициент и получаем значение мощности, которое и передаем на нагреватель. Но при использовании только пропорциональной составляющей есть два больших минуса – во-первых, эффект от нашего воздействия наступает не моментально, а с запаздыванием, и, во-вторых, пропорциональная составляющая никак не учитывает воздействие окружающей среды на объект. Например, когда мы добились того, чтобы температуры объекта была равна нужному нам значению, невязка стала равна нулю, а вместе с ней и выдаваемая мощность стала нулевой. Но температура не может просто так оставаться постоянной, поскольку происходит теплообмен с окружающей средой и объект охлаждается. Таким образом, при использовании только пропорциональной составляющей температура будет колебаться около нужного нам значения.
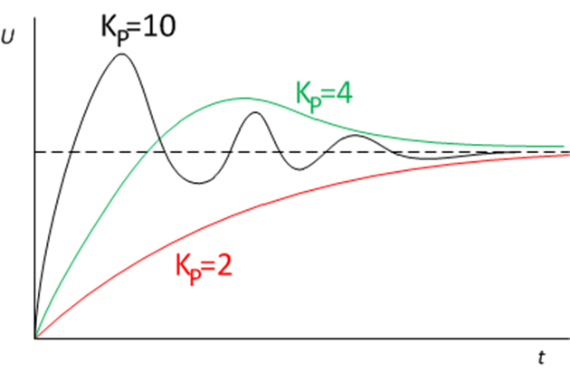
Пропорциональная составляющая не способна компенсировать ошибку полностью. Это видно из формулы. Выходной сигнал в
KP раз больше ошибки. Если ошибка рассогласования равна 0, то и выходной сигнал регулятора равен 0. А тогда и компенсировать нечем. Поэтому в пропорциональных регуляторах всегда существует так называемая статическая ошибка. Уменьшить ее можно за счет увеличения коэффициента KP, но это может привести к снижению устойчивости системы и даже к автоколебаниям.
К недостаткам пропорциональных регуляторов следует отнести:
- наличие статической ошибки регулирования;
- невысокая устойчивость при увеличении коэффициента.
Есть весомое преимущество – высокая скорость регулирования. Реакция пропорционального регулятора на ошибку рассогласования ограничена только временем дискретизации системы.
Регуляторы, работающие только по пропорциональному закону, применяют редко.
Главная задача пропорциональной составляющей в ПИД-регуляторе – повысить быстродействие.
Интегрирующая составляющая.
С учетом временной дискретности регулятора можно записать следующим образом:


Интегрирующая составляющая пропорциональна интегралу ошибки рассогласования.
С учетом временной дискретности регулятора можно записать следующим образом (см. на рисунке), где I(t-1) – значение I предыдущей точке временной дискретизации.
Ошибка рассогласования умножается на коэффициент и прибавляется к предыдущему значению интегрирующего звена. Т.е. выходной сигнал все время накапливается и со временем увеличивает свое воздействие на объект. Таким образом, ошибка рассогласования полностью компенсируется даже при малых значениях ошибки и коэффициента KI. В установившемся состоянии выходной сигнал регулятора полностью обеспечивается интегрирующей составляющей.
Возвращаемся к нашему примеру. Температура ниже значения уставки, начинаем подогревать. Пока мы нагреваем, значение невязки положительное и накапливается в интегральной составляющей. Когда температура “дошла” до нужного нам значения, пропорциональная составляющая стала равной нулю, а интегральная перестала изменяться, но ее значение не стало равным нулю. Таким образом, благодаря накопленному интегралу мы продолжаем выдавать мощность и нагреватель поддерживает нужную нам температуру, не давая объекту охлаждаться.

К недостаткам интегрального регулятора следует отнести:
Достоинство – способность полностью компенсировать ошибку рассогласования при любом коэффициенте усиления.
На практике часто используют интегрирующие регуляторы (только интегрирующая составляющая) и пропорционально-интегрирующие (интегрирующая и пропорциональная составляющие).
Главная задача интегрирующего звена в ПИД регуляторе – компенсация статической ошибки, обеспечение высокой точности регулирования.
Дифференцирующая составляющая.

С учетом временной дискретности регулятора можно записать следующим образом:

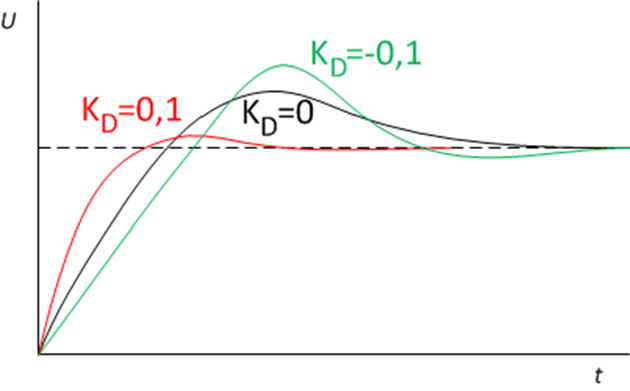
Дифференцирующая составляющая пропорциональна скорости изменения ошибки рассогласования.
Своеобразный показатель ускорения ошибки рассогласования. Дифференцирующая составляющая предсказывает отклонения регулируемого параметра в будущем и противодействует этому отклонению. Как правило, она компенсирует запаздывания воздействия регулятора на объект и повышает устойчивость системы.
Дифференцирующая составляющая показывает, насколько изменилось значение ошибки рассогласования за одну временную единицу дискретности регулятора.
Пусть у нас текущая температура меньше нужного нам значения. Пропорциональная составляющая начинает выдавать мощность и нагревать объект. Дифференциальная составляющая вносит свой вклад в мощность и представляет из себя производную невязки, взятую также с определенным коэффициентом. Температура растет и приближается к нужному значению, а следовательно невязка в предыдущий момент больше текущего значения невязки, а производная отрицательная. Таким образом, дифференциальная составляющая начинает постепенно снижать мощность до того, как температура достигла необходимого значения.
Регуляторов, состоящих из единственного дифференцирующего звена, не бывает!
Главная задача дифференцирующего звена в ПИД регуляторе – повышение устойчивости.
Ламповые генераторы, автогенераторы (генераторы с самовозбуждением) применяются в качестве источников питания электротермических установок, предназначенных для плавки, нагрева и закалки различных металлических материалов и деталей. Они выпускаются промышленностью на стандартные частоты 66, 440, 880 кГц, 1,76; 5,28; 13,26; 27,12 МГц и стандартные мощности 4, 10, 25, 40, 60, 100, 160, 250, 400, 600, 1000 кВт и т.д.
Основным конструктивным элементом данных генераторов является электронная генераторная лампа, относящаяся к классу триодов. Обычно такие лампы представляют собой конструкцию, напоминающую систему из трех коаксиальных цилиндров. Центральным элементом конструкции является нить накала.
Даже при давлениях в газе порядка 10–7–10–6 Па, что соответствует высокому вакууму, концентрация молекул составляет 1014 м–3. Эти молекулы не могут быть ионизированными, поскольку они не сталкиваются друг с другом. Для получения электрического тока в вакууме туда надо внести каким-то образам носители зарядов. Как правило, такими носителями являются электроны. А удобнее всего для изучения электрического тока в вакууме использовать электронные лампы, в частности вакуумный диод.
Электрический ток в вакууме. Вакуумный диод.
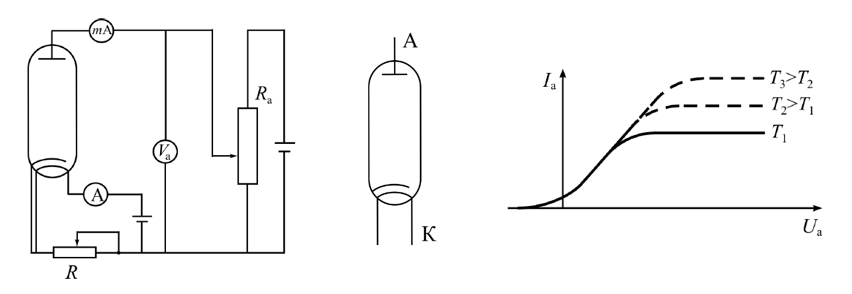
В основе работы электронной лампы лежит явление термоэлектронной эмиссии, открытое американским изобретателем Т. Эдисоном (1847–1931) в 1883 г. Суть явления заключается в том, что при нагревании металла электроны приобретают кинетическую энергию большую за работу их выхода из металлов. В вакуумном диоде имеется два электрода: катод и анод. Раскаленная металлическая нить является источником электронов и одновременно катодом. Нить расположена на оси металлического полого цилиндра, который является анодом. Электроды помещены в стеклянный или металлический баллон, давление в котором составляет 10–6–10–5 Па Па. Чаще всего катод изготавливается из вольфрама, интенсивная электронная эмиссия из которого начинается при разогреве до 1700 К. Для уменьшения температуры накала катод покрывается слоем какого-либо вещества с небольшой работой выхода электронов. Например, изготовленные из никеля катоды, покрывают оксидами щелочноземельных металлов (ВаО, SrO и т. д.). Эмиссия в таком случае наблюдается уже при температурах 500–600 К. На рисунке представлена электрическая схема для изучения зависимости силы термоэлектронного тока от разности потенциалов между анодом и катодом (анодного напряжения). Ток в цепи отсутствует при холодном катоде, что естественно (холодный катод не эмитирует). Если катод раскален до определенной температуры
При программной реализации ПИД-регулятора вычисления выходного сигнала происходят через равные промежутки времени, т.е. регулятор является дискретным по времени.
Составляющие ПИД регулятора.
Выходной сигнал ПИД регулятора – это сумма трех составляющих:
-
пропорциональной; -
интегрирующей; -
дифференцирующей.
Пропорциональная составляющая.
Пропорциональная составляющая не имеет памяти, т.е. значение выходного сигнала не зависит от предыдущего состояния системы. Просто ошибка рассогласования, умноженная на коэффициент, передается на выход. Выходной сигнал компенсирует отклонение регулируемого параметра. Сигнал тем больше, чем больше ошибка рассогласования. При ошибке равной 0, сигнал на выходе тоже равен 0.
Иначе говоря, берем значение нужной нам температуры (уставку) и вычитаем из него значение текущей температуры. Получаем рассогласование (невязку). Умножаем полученную невязку на коэффициент и получаем значение мощности, которое и передаем на нагреватель. Но при использовании только пропорциональной составляющей есть два больших минуса – во-первых, эффект от нашего воздействия наступает не моментально, а с запаздыванием, и, во-вторых, пропорциональная составляющая никак не учитывает воздействие окружающей среды на объект. Например, когда мы добились того, чтобы температуры объекта была равна нужному нам значению, невязка стала равна нулю, а вместе с ней и выдаваемая мощность стала нулевой. Но температура не может просто так оставаться постоянной, поскольку происходит теплообмен с окружающей средой и объект охлаждается. Таким образом, при использовании только пропорциональной составляющей температура будет колебаться около нужного нам значения.
Пропорциональная составляющая не способна компенсировать ошибку полностью. Это видно из формулы. Выходной сигнал в
KP раз больше ошибки. Если ошибка рассогласования равна 0, то и выходной сигнал регулятора равен 0. А тогда и компенсировать нечем. Поэтому в пропорциональных регуляторах всегда существует так называемая статическая ошибка. Уменьшить ее можно за счет увеличения коэффициента KP, но это может привести к снижению устойчивости системы и даже к автоколебаниям.
К недостаткам пропорциональных регуляторов следует отнести:
- наличие статической ошибки регулирования;
- невысокая устойчивость при увеличении коэффициента.
Есть весомое преимущество – высокая скорость регулирования. Реакция пропорционального регулятора на ошибку рассогласования ограничена только временем дискретизации системы.
Регуляторы, работающие только по пропорциональному закону, применяют редко.
Главная задача пропорциональной составляющей в ПИД-регуляторе – повысить быстродействие.
Интегрирующая составляющая.
С учетом временной дискретности регулятора можно записать следующим образом:
Интегрирующая составляющая пропорциональна интегралу ошибки рассогласования.
С учетом временной дискретности регулятора можно записать следующим образом (см. на рисунке), где I(t-1) – значение I предыдущей точке временной дискретизации.
Ошибка рассогласования умножается на коэффициент и прибавляется к предыдущему значению интегрирующего звена. Т.е. выходной сигнал все время накапливается и со временем увеличивает свое воздействие на объект. Таким образом, ошибка рассогласования полностью компенсируется даже при малых значениях ошибки и коэффициента KI. В установившемся состоянии выходной сигнал регулятора полностью обеспечивается интегрирующей составляющей.
Возвращаемся к нашему примеру. Температура ниже значения уставки, начинаем подогревать. Пока мы нагреваем, значение невязки положительное и накапливается в интегральной составляющей. Когда температура “дошла” до нужного нам значения, пропорциональная составляющая стала равной нулю, а интегральная перестала изменяться, но ее значение не стало равным нулю. Таким образом, благодаря накопленному интегралу мы продолжаем выдавать мощность и нагреватель поддерживает нужную нам температуру, не давая объекту охлаждаться.
К недостаткам интегрального регулятора следует отнести:
-
низкое быстродействие; -
посредственная устойчивость.
Достоинство – способность полностью компенсировать ошибку рассогласования при любом коэффициенте усиления.
На практике часто используют интегрирующие регуляторы (только интегрирующая составляющая) и пропорционально-интегрирующие (интегрирующая и пропорциональная составляющие).
Главная задача интегрирующего звена в ПИД регуляторе – компенсация статической ошибки, обеспечение высокой точности регулирования.
Дифференцирующая составляющая.
С учетом временной дискретности регулятора можно записать следующим образом:
Дифференцирующая составляющая пропорциональна скорости изменения ошибки рассогласования.
Своеобразный показатель ускорения ошибки рассогласования. Дифференцирующая составляющая предсказывает отклонения регулируемого параметра в будущем и противодействует этому отклонению. Как правило, она компенсирует запаздывания воздействия регулятора на объект и повышает устойчивость системы.
Дифференцирующая составляющая показывает, насколько изменилось значение ошибки рассогласования за одну временную единицу дискретности регулятора.
Пусть у нас текущая температура меньше нужного нам значения. Пропорциональная составляющая начинает выдавать мощность и нагревать объект. Дифференциальная составляющая вносит свой вклад в мощность и представляет из себя производную невязки, взятую также с определенным коэффициентом. Температура растет и приближается к нужному значению, а следовательно невязка в предыдущий момент больше текущего значения невязки, а производная отрицательная. Таким образом, дифференциальная составляющая начинает постепенно снижать мощность до того, как температура достигла необходимого значения.
Регуляторов, состоящих из единственного дифференцирующего звена, не бывает!
Главная задача дифференцирующего звена в ПИД регуляторе – повышение устойчивости.
15. Электрический ток в вакууме. Вакуумный диод. Вакуумный триод.
Ламповые генераторы, автогенераторы (генераторы с самовозбуждением) применяются в качестве источников питания электротермических установок, предназначенных для плавки, нагрева и закалки различных металлических материалов и деталей. Они выпускаются промышленностью на стандартные частоты 66, 440, 880 кГц, 1,76; 5,28; 13,26; 27,12 МГц и стандартные мощности 4, 10, 25, 40, 60, 100, 160, 250, 400, 600, 1000 кВт и т.д.
Основным конструктивным элементом данных генераторов является электронная генераторная лампа, относящаяся к классу триодов. Обычно такие лампы представляют собой конструкцию, напоминающую систему из трех коаксиальных цилиндров. Центральным элементом конструкции является нить накала.
Даже при давлениях в газе порядка 10–7–10–6 Па, что соответствует высокому вакууму, концентрация молекул составляет 1014 м–3. Эти молекулы не могут быть ионизированными, поскольку они не сталкиваются друг с другом. Для получения электрического тока в вакууме туда надо внести каким-то образам носители зарядов. Как правило, такими носителями являются электроны. А удобнее всего для изучения электрического тока в вакууме использовать электронные лампы, в частности вакуумный диод.
Электрический ток в вакууме. Вакуумный диод.
В основе работы электронной лампы лежит явление термоэлектронной эмиссии, открытое американским изобретателем Т. Эдисоном (1847–1931) в 1883 г. Суть явления заключается в том, что при нагревании металла электроны приобретают кинетическую энергию большую за работу их выхода из металлов. В вакуумном диоде имеется два электрода: катод и анод. Раскаленная металлическая нить является источником электронов и одновременно катодом. Нить расположена на оси металлического полого цилиндра, который является анодом. Электроды помещены в стеклянный или металлический баллон, давление в котором составляет 10–6–10–5 Па Па. Чаще всего катод изготавливается из вольфрама, интенсивная электронная эмиссия из которого начинается при разогреве до 1700 К. Для уменьшения температуры накала катод покрывается слоем какого-либо вещества с небольшой работой выхода электронов. Например, изготовленные из никеля катоды, покрывают оксидами щелочноземельных металлов (ВаО, SrO и т. д.). Эмиссия в таком случае наблюдается уже при температурах 500–600 К. На рисунке представлена электрическая схема для изучения зависимости силы термоэлектронного тока от разности потенциалов между анодом и катодом (анодного напряжения). Ток в цепи отсутствует при холодном катоде, что естественно (холодный катод не эмитирует). Если катод раскален до определенной температуры