ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 02.02.2024
Просмотров: 641
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
СОДЕРЖАНИЕ
3. Описание и классификация активных фильтров. Фильтр нижних частот.
4. Описание и классификация активных фильтров. Фильтр верхних частот.
5. Описание и классификация активных фильтров. Полосовые фильтры.
9. Генераторы гармонических сигналов. Теоретические сведения. Принцип работы. Генератор Буббы.
6 – 10 вопросы. Заключение по всем генераторам.
14. Принципы автоматического управления. Общие сведения о структурах систем управления. Регуляторы.
15. Электрический ток в вакууме. Вакуумный диод. Вакуумный триод.

180-градусное управление.
Эффективное значение линейного напряжения:
Эффективное значение фазного напряжения:
При 180-градусном управлении каждый из транзисторов находится в открытом состоянии 180°, пары транзисторов, образующих вертикальные стойки, как и в однофазных двухтактных схемах, работают в противофазе, управление вертикальными стойками транзисторов осуществляется со сдвигом на 120°.
Алгоритм управления транзисторами и диаграммы напряжений показаны на рисунке выше.
Управляющие импульсы на каждый очередной транзистор подаются через 60°. В результате на интервале одного периода выходного напряжения образуется шесть интервалов неизменного состояния схемы.
На выходе инвертора появляются три линейных напряжения с амплитудой, равной напряжению Ud, и с паузой на нулевом уровне 60°. Эти напряжения взаимно сдвинуты на 120°. Наличие указанной паузы автоматически обеспечивает достаточно хорошее качество переменного напряжения, так как отсутствуют третья и кратные ей гармоники.
Фазные напряжения наглядно и легко определяются для симметричной активной нагрузки, т.е. при ZA=ZB=ZC=RH.
На любом интервале фазные нагрузки подключаются к источнику питания так, что две из них включаются параллельно между собой и последовательно с третьей. В связи с этим очевидно, что в условиях равенства сопротивлений нагрузки в фазах напряжения фаз, нагрузки которых включены параллельно, равны ±Uвx/3, а напряжение фазы, нагрузка которой включена последовательно, равно ±2Uвx/3. В результате фазные напряжения имеют двухступенчатую форму с амплитудой первой ступени Ud/3 и второй ступени 2Ud/3. Фазные напряжения также имеют взаимный фазовый сдвиг в 120°.
120-градусное управление.

Эффективное значение линейного напряжения:
Эффективное значение фазного напряжения:

При 120-градусном управлении каждый из транзисторов находится в открытом состоянии 120° в соответствии с алгоритмом управления, показанным на рисунке.
Если при 180-градусном управлении в любой момент одновременно открыты три ключа, то при 120-градусном — два.
Из схем подключения нагрузок для каждого интервала неизменного состояния транзисторов видно, что все время к источнику подключены последовательно по две фазные нагрузки, а третья находится в отключенном состоянии. Если принять сопротивления фаз нагрузки одинаковыми и чисто активными, то выходные фазные напряжения будут на соответствующих интервалах равны либо Ud/2, либо нулю.
Линейное напряжение, таким образом, имеет ступенчатую форму с амплитудой первой ступени Udи второй Ud/2.
При активно-индуктивной нагрузке процессы усложняются, а форма напряжений начинает изменяться. Это является недостатком инвертора при 120-градусном управлении.
Тактностъ схемы характеризуется взаимосвязью работы транзисторных ключей. В двухтактных схемах всегда можно выделить пары противотактно работающих ключей (один замыкается, другой размыкается). В однотактных ключи работают синхронно.
Регулировать значение выходного напряжения АИН можно несколькими способами:
-
широтно-импульсное регулирование (ШИР); -
метод геометрического суммирования; -
широтно-импульсная модуляция (ШИМ).
Наибольшее применение на практике получили три способа широтно - импульсного регулирования напряжения инверторов:
- Регулирование по прямоугольному закону, когда среднее значение выходного напряжения и ширина импульса изменяются по прямоугольному признаку;
- Регулирование по трапецеидальному закону - в этом случае среднее значение выходного напряжения имеет вид трапеции;
- Регулирование по синусоидальному закону, когда ширина импульсов выходного напряжения регулируется по синусоидальному закону.
Регулирование выходного напряжения АИН.

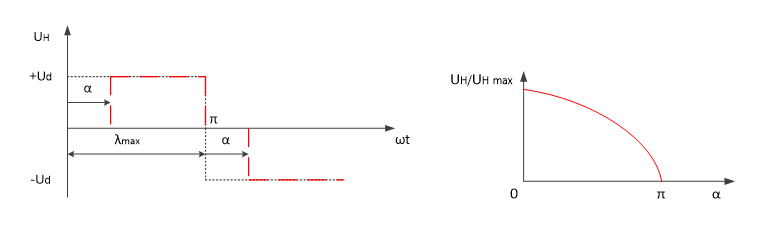

Если передний фронт составляющих импульсов сдвигать на угол α в сторону отставания, как показано на рисунке (или задний фронт в сторону опережения, или оба одновременно), то будет уменьшаться длительность составляющих импульсов λ, а значит, будет изменяться действующее значение напряжения на нагрузке.
Из полученного выражения и из временной диаграммы следует, что максимальное напряжение соответствует нулевому значению угла α. Очевидно, что выходное напряжение равно нулю при α=π. Регулировочная характеристика, построенная по полученной зависимости, имеет вид, показанный на рисунке.

Различают два типа широтно-импульсной модуляции:
-
Однополярная ШИМ; -
Двухполярная ШИМ.
При однополярной ШИМ выходное напряжение формируется из последовательности однополярных импульсов. Для образования паузы при активно-индуктивной нагрузке схема управления должна обеспечить протекание тока нагрузки через два вентиля, подключающих нагрузку накоротко к одной из шин источника питания.
При двухполярной ШИМ паузы однополярной ШИМ заполняются импульсами противоположной полярности.
14. Принципы автоматического управления. Общие сведения о структурах систем управления. Регуляторы.
Принципы автоматического управления. Общие сведения о структурах систем управления.
Пример: импульсный понижающий преобразователь для регулирования напряжения на термоэлементе.
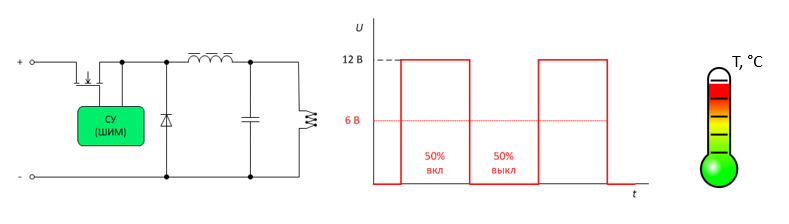
Одним из примеров, на основе которого можно рассмотреть типы систем управления, является импульсный понижающий преобразователь для регулирования напряжения на термоэлементе. На рисунке (слева) представлен DC-DC понижающий преобразователь, управление которым осуществляется по средством ШИМ. На рисунке (справа) представлен типовой сигнал управления ШИМ с коэффициентом заполнения 50% поступающий к транзистору, таким образом, на выходе преобразователя формируется среднее значение выходного напряжения 6 В при 12 В на входе.
В простейшем случае функциональная схема управления представлена на рисунке (слева). В случае автоматизации процесса управления функциональная блок-схема претерпевает незначительные изменения (см. на рисунке справа).
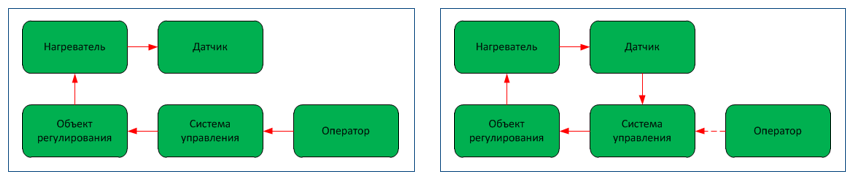
Таким образом, связь объекта управления с управляющим устройством производится в соответствии с двумя основными схемами: разомкнутой и замкнутой. Замкнутая система управления реализуется путем введения обратной связи. В технических системах блок сравнения присутствует в явном виде как устройство, позволяющее вычитать одно значение сигнала из другого. В этом случае имеет место отрицательная обратная связь. В случае положительной обратной связи сигналы суммируются.
Простейшая система автоматического регулирования с обратной связью.
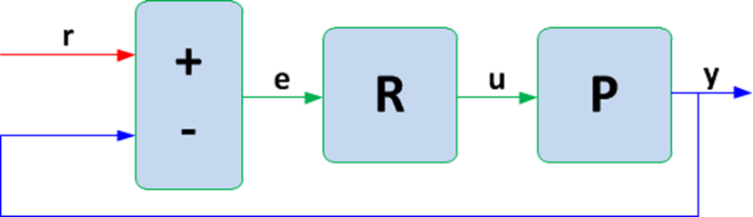
Блок R – регулятор (от слова Regulator), P - объектом регулирования (от слова Process), r - управляющим воздействием или уставкой (reference), e - сигналом рассогласования или ошибки (error), u - выходной величиной регулятора, y - регулируемой величиной.
Отрицательная обратная связь обеспечивает подачу на управляемый объект со стороны управляющего устройства команд, направленных на ликвидацию рассогласования действий системы с заданной программой.
Положительная обратная связь ведет не к устранению, а к усилению рассогласования.
Обратная связь является основой саморегулирования в простых и сложных системах. Простейшая система автоматического регулирования с обратной связью показана на рисунке.
Воздействие на объект регулирования.
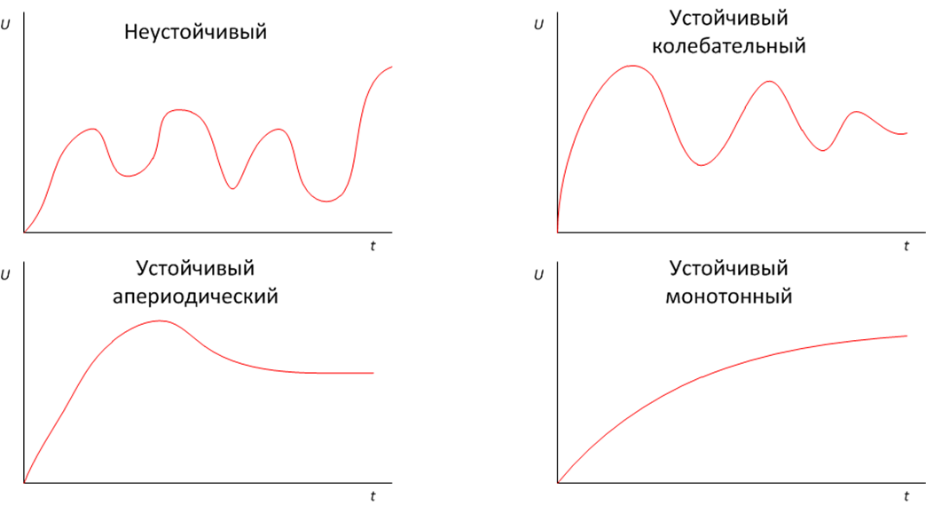
При воздействии на объект регулирования возможны несколько сценариев переходных процессов (реакций объекта регулирования на сигналы системы управления, см. на рисунке).
С помощью настройки регулятора, возможно скорректировать переходный процесс так, как необходимо для решения конкретной задачи. Одним из таких регуляторов является ПИД-регулятор.
Регуляторы.
Пропорционально-интегрально-дифференцирующий (ПИД) регулятор – устройство в управляющем контуре с обратной связью. Используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса, формирует выходной сигнал, являющийся суммой трех составляющих с разными передаточными характеристиками. Благодаря этому ПИД-регулятор обеспечивает высокое качество регулирования и позволяет оптимизировать управление по отдельным критериям (высокая точность, быстродействие и устойчивость).

Функциональная схема ПИД-регулятора представлена на рисунке.
В формировании выходного сигнала ПИД-регулятора участвуют:
Пропорциональная составляющая – значение пропорционально ошибке рассогласования (разности заданного и реального значений регулируемого параметра);
Интегрирующая составляющая – интеграл ошибки рассогласования;
Дифференцирующая составляющая – производная ошибки рассогласования.
Математическая форма записи закона ПИД-регулятора имеет вид:

u(t) – выходной сигнал; P, I, D – пропорциональная, интегральная, дифференциальная составляющие соответственно; KP, KI