Файл: Разработка системы автоматического контроля и регулирования.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 09.02.2024
Просмотров: 26
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

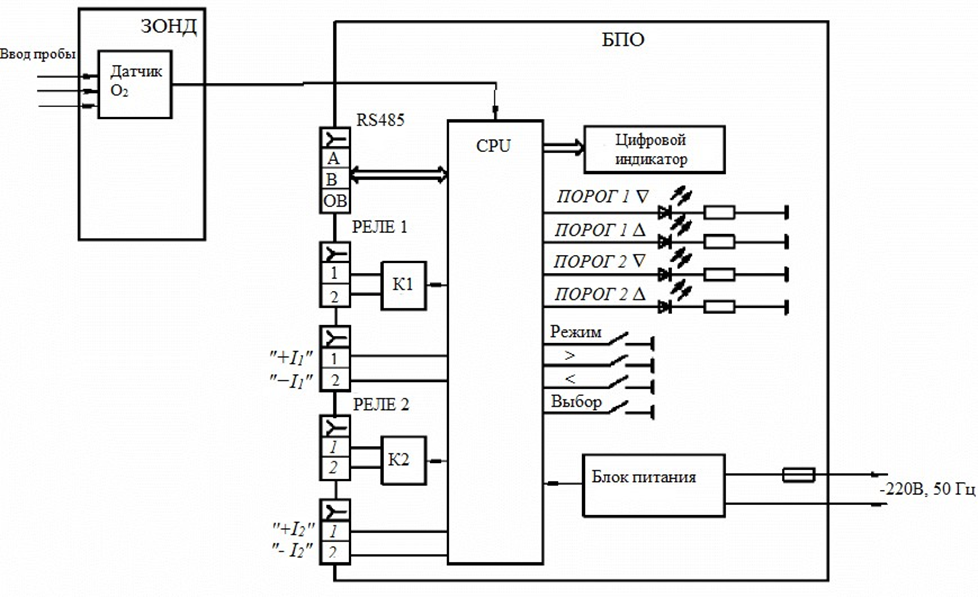
Рис. 4.4. Функциональная схема АКВТ-02
Изменение расхода воздуха. Изменение расхода воздуха осуществляется следующими способами:
1. Создание препятствия поворотом лопаток направляющего аппарата в зависимости от отклонения, тем самым сокращая поток воздуха через дутьевой вентилятор.
Два осевых направляющих аппарата (левый и правый) для центробежного дутьевого вентилятора двухстороннего всасывания типа ВДН-25х2 определяют режим работы вентилятора и поставляются в комплекте. Осевые направляющие аппараты состоят из сварного цилиндрического корпуса с направляющей полосой, по которой перемещается на роликах поворотное кольцо, и 12 профильных лопаток, соединенных с поворотным кольцом рычажной системой. Лопатки установлены в корпусе консольно. Направляющие аппараты изготовлены разъемными и соединены между собой промежуточным валом с рычагами и тягами, что обеспечивает синхронный поворот лопаток обоих аппаратов от одного электродвигателя. Лопатки направляющих аппаратов могут поворачиваться от 0 (всасывающее отверстие открыто полностью) до 90°. При промежуточных углах от 0 до 90° поток газов воздуха откланяется по направлению вращения рабочего колеса, что приводит к плавному уменьшению производительности и давления, развиваемого машиной. Привод направляющих аппаратов осуществляется от электроисполнительного механизма типа МЭО-160. Привод вентиляторов осуществляется от закрытого двухскоростного асинхронного электродвигателя типа ДАЗО2-18-59-6/8У1.
2. Изменение скорости вращения дутьевого вентилятора (частоты вращения электродвигателя).
Для регулирования скорости дутьевого вентилятора устанавливается дополнительное оборудование – преобразователь частоты. Преобразователь частоты (ПЧ) с широтно-импульсным управлением обеспечивает плавный пуск асинхронного двигателя и осуществляет управление электроприводом по заданной формуле соотношения напряжение/частота, так называемый скалярный режим управления, когда ПЧ управляет амплитудой и частотой. Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока – это первый этап преобразования.
Силовой трехфазный импульсный инвертор состоит из шести транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. В качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями.
Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя – это второй этап преобразования [18].
Для регулирования электродвигателя ДАЗО2-18-59-6/8У1 номинальной мощностью 685кВ и напряжением 6кВ выберем преобразователь частоты типа СТА-В9.HVI.
Высоковольтные частотные преобразователи прямого включения серий СТА-B9.HVI предназначены для управления высоковольтными асинхронными двигателями с уровнями питающего напряжения 3000В, 6000В или 10000В и номинальной мощностью от 315 до 8000кВт (полные технические характеристики приведены в [19]).
Схемы подключения приборов к ПТК «ТЕКОН»:
1. Типовая схема подключения AI02
Схема применяется для подключения датчика с унифицированным токовым сигналом 0(4) до 20мА; от 20 до 0(4)мА; от 0 до 5мА; от 5 до 0мА к ПТК. Питание датчика осуществляется по цепи измерения напряжением 24VDC. Выходной ток измерительных преобразователей датчиков – не более 25мА.

Рис. 4.5. Типовая схема подключения AI02
2. Типовая схема подключения АI00
Схема применяется для подключения датчика с унифицированным токовым сигналом 0(4) до 20мА; от 20 до 0(4)мА; от 0 до 5мА; от 5 до 0мА к ПТК. Питание датчика осуществляется от внешнего источника.
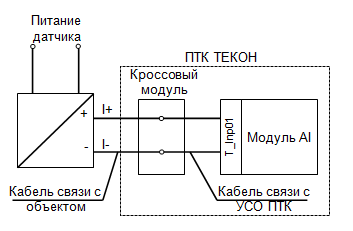
Рис. 4.6. Типовая схема подключения АI00
3. Типовая схема подключения DI04 применяется для подключения замыкающего контакта потенциального (220V AC) дискретного датчика.
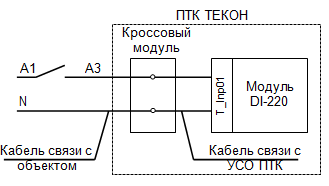
Рис. 4.7. Типовая схема подключения DI04
Модульный контроллер средней мощности МФК1500.
Многофункциональный программируемый контроллер МФК1500 предназначен [20]:
- для построения информационных систем объема от 100 до 1000 измерительных каналов в одном контроллере;
- для построения управляющих и информационных систем автоматизации технологических процессов среднего уровня сложности;
- для систем блокировок и противоаварийной защиты (ПАЗ). Контроллер МФК1500 состоит из:
- блок сопряжения входов и выходов модулей УСО с датчиками и исполнительными устройствами МКС (модуль клеммных соединений) – для аналоговых сигналов и УДС (умощнитель дискретных сигналов) – для дискретных. Подключение цепей питания, цепей датчиков и исполнительных устройств к МКС и УДС производится через клеммные соединители проводом сечением 0,5…2,5 мм2;
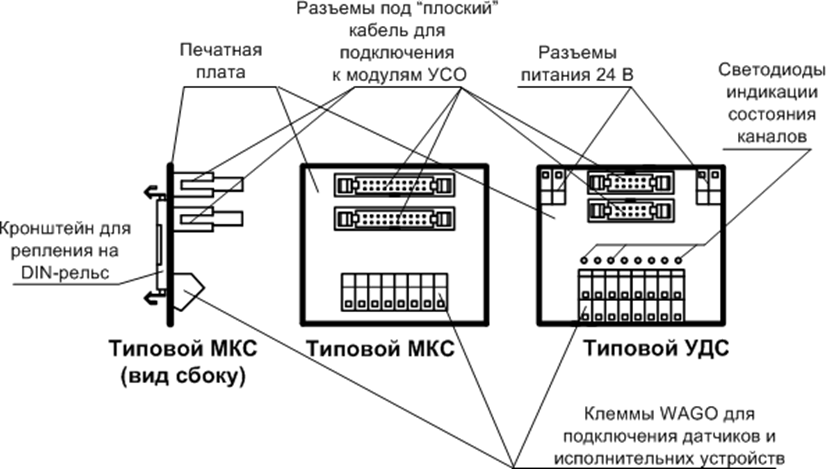
Рис. 4.10. Внешний вид типовых МКС и УДС
- модули УСО (модули ввода-вывода) предназначенные для работы с различными типами сигналов: ввода сигналов термопар и термометров сопротивления; ввода и вывода унифицированных аналоговых сигналов среднего уровня; ввода и вывода дискретных сигналов. Подключение модулей ввода-вывода аналоговых сигналов к соответствующим МКС осуществляется с помощью 20-жильного плоского кабеля, дискретных сигналов к соответствующим МКС и УДС – с помощью 10-жильного плоского кабеля;

Рис. 4.11. Внешний вид типового модуля УСО
- одного или двух ЦП CPU715, в котором загружается и выполняется прикладная (технологическая) программа пользователя. ЦП осуществляет обмен данными по внутренней шине контроллера с модулями УСО, а по интерфейсу Ethernet через ЛВС АСУ ТП. Модуль CPU715 имеет также интерфейсы RS-485 и RS-232, через которые идет обмен данными с терминалами, GSM-модемами и другими устройствами, оснащенными аналогичными интерфейсами;
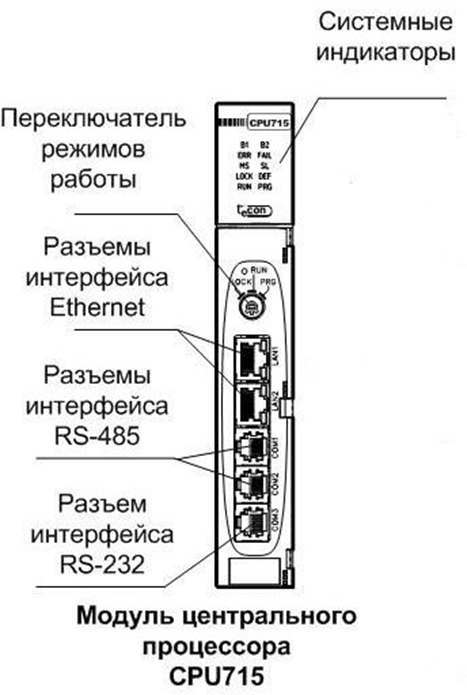
Рис. 4.12. Внешний вид типового модуля ЦП CPU715
- одного или нескольких шасси, которые обеспечивают подключение модулей к внутренней дублированной шине контроллера. Шасси выпускаются в трех модификациях в зависимости от количества посадочных мест: CR1504 (4 посадочных места), CR1508 (8 посадочных мест), CR1516 (16 посадочных мест).
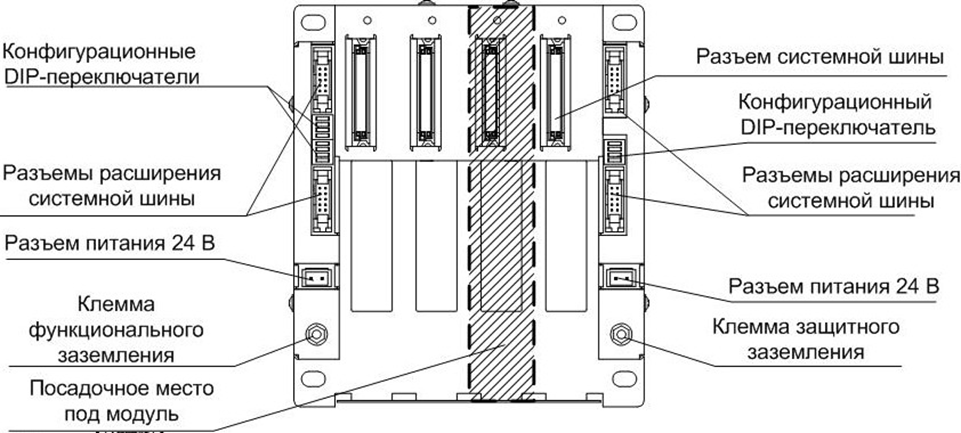
Рис. 4.13. Внешний вид шасси CR1504
Таблица 4.8 Таблица сигналов объекта и перечень модулей УСО контроллера
| Тип сигнала | Количество каналов | Тип МКС или УДС | Тип модуля УСО | Количество модулей | Количество МКС или УДС |
| Аналоговый ввод 4-20 мА | 6 | ТСС4А | АI4 | 1 | 2 |
| Дискретный ввод 220В | 5 | ТСС8_220 AC | DI16 | 1 | 1 |
| Аналоговый вывод 4- 20 мА | 1 | ТСС4А | AOC2 | 1 | 1 |
| Дискретный вывод +24В | 6 | TCB08RT | DO16 | 1 | 1 |
Модули ввода и вывода:
Модуль AI4. Обозначение ДАРЦ.426431.022. Модуль ввода аналоговых сигналов среднего уровня. Содержит 4 канала ввода сигналов тока в диапазонах 0...5 мА, 0...20 мА и 4...20 мА или напряжения постоянного тока в диапазоне 0...10 В. Модуль AI4 содержит: управляющий микроконтроллер с внутренней памятью программ и данных, преобразователь питания 24/5 В, 4 измерительных канала.
Модуль DI16. Обозначение ДАРЦ.426436.043. Модуль ввода дискретных сигналов. Содержит 16 каналов вывода дискретных сигналов 24В с групповой гальванической развязкой, объединенных по схеме с «общим минусом».
Модуль DO16. Обозначение ДАРЦ.426436.043. Модуль вывода дискретных сигналов предназначены для коммутации электрических цепей постоянного тока с номинальным напряжением 24 В. Модули служат для управления нагрузками через промежуточные умощнители дискретных сигналов соответствующего типа. Содержит 16 каналов с групповой гальванической развязкой 2 группы по 8 каналов дискретного вывода.
Модуль АОС2. Обозначение ДАРЦ.426435.004. Модуль вывода аналоговых сигналов. Содержит 4 канала вывода токовых сигналов 4..20мА с индивидуальной гальванической развязкой.
Модуль клеммных соединений TCC4A. Модуль предназначен для подключения модуля AI4 к источникам сигнала (датчикам). Модуль имеет 4 канала с индивидуальной гальванической развязкой, применим для ввода и вывода
сигналов тока и напряжения среднего уровня, не поддерживает подключение датчиков с пассивным токовым выходом, поддерживает возможность применения в дублированных и резервированных системах (кроме ввода сигналов тока). МКС ТСС4А содержит восьмиконтактный разъем типа WAGO для подключения объектовых проводов (XS1), два двадцатиконтактных разъема типа IDC для подключения объектовых разъемов модулей аналогового ввода или вывода (XP1, XP2). TCC4A представляет собой печатную плату, закрепляемую на 35-мм DIN-рейке двумя пластмассовыми кронштейнами, входящими в состав изделия.
Модуль клеммных соединений TCС8_220AC. Обозначение ДАРЦ.434400.037. Предназначен для ввода дискретных сигналов 220 В. Содержит 8 каналов.
Умощнитель дискретных сигналов (УДС) TCB08RT. Обозначение ДАРЦ.426436.036. УДС постоянного и переменного напряжения 24..220 В предназначен для управления исполнительными устройствами и коммутации электрического оборудования с активным и реактивным характером нагрузок. Содержит 8 каналов с индивидуальной гальванической развязкой.
Шасси CR1508. Обозначение ДАРЦ.301241.000. Предназначен для объединения всех модулей в контроллер. Содержит 8 посадочных места.
Программное обеспечение. Контроллер представляет разработчику АСУ ТП возможность создания, загрузки и отладки прикладных проектов, используя языки технологического программирования. Среда технологического программирования, установленная на инженерной станции разработчика АСУ ТП, взаимодействует с БПО контроллера.
Базовой системой программирования контроллера является система ISaGRAF. Загрузка подготовленных прикладных программ в память контроллера для отладки и выполнения производится по сети Ethernet, используя протокол TCP/IP. В составе ПТК ТЕКОН разработка и отладка прикладных программ контроллера ведется в пакете «Agraf».
Для предоставления информации, дистанционного управления или диспетчеризации рабочего процесса в реальном времени, а также контроля протекания технологического процесса и состояния технологических параметров и оборудования предусмотрены компоненты ПО.
Верхний уровень ПТК представлен SCADA-системой, которая представляет собой программный пакет, позволяющий разрабатывать, а также обеспечивать работу в реальном времени систем контроля, управления, защит, блокировок, регулирования и обеспечивает связь между оперативным эксплуатационным персоналом.
Полное представление оператору о

