Файл: Разработка системы автоматического контроля и регулирования.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 09.02.2024
Просмотров: 28
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

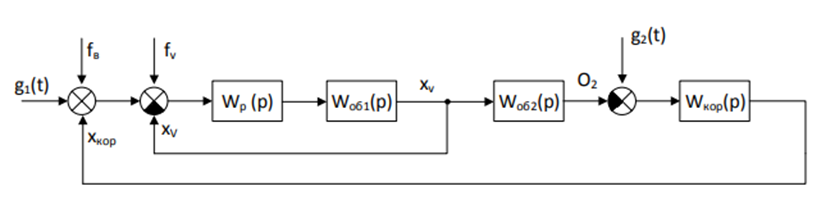
Рис.3.1 Структурная схема регулирования расхода воздуха
Wр(р) – передаточная функция регулятора воздуха; Wоб1(р) – передаточная функция участка воздуховода; Wоб2(р) – передаточная функция участка регулирования О2; Wкор(р) – передаточная функция корректирующего регулятора; fB, fV – внешнее и внутреннее возмущающие воздействия; g1(t), g2(t) – задающие воздействия.
Структурная схема АСР двухконтурная каскадная с внутренним стабилизирующим и внешним корректирующим контурами.
Внутренний контур включает в себя регулятор воздуха с передаточной функцией Wр(р) и участок воздуховода (участок от выхода дутьевых вентиляторов до места измерения расхода воздуха) с передаточной функцией Wоб1(р). Входными сигналами внутреннего контура являются
- управляющие воздействия g(t);
- внешнее возмущающее воздействие по расходу топлива fB;
- воздействие корректирующего регулятора хкор.
Выходная величина – расход воздуха xv. Стабилизирующий контур поддерживает значение расхода воздуха xv в соответствии со значением расхода топлива fB, а также в соответствии с сигналом корректирующего регулятора хкор. Объект регулирования внутреннего контура (участок воздуховода) обладает незначительной инерционностью, и переходные процессы завершаются раньше, чем это могло бы повлиять на выходную величину внешнего контура.
Передаточная функция внутреннего контура равна
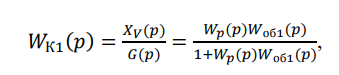
где ХV(p), G(p) – выходной и входной сигналы замкнутой системы соответственно;
Wp(p) – передаточная функция регулятора воздуха;
Wоб1(р) – передаточная функция участка воздуховода.
Внешний контур является корректирующим и образован корректирующим регулятором с передаточной функцией Wкор(р), внутренним, малоинерционным контуром с передаточной функцией WК1(р) и объектом регулирования (участок регулирования О2) с передаточной функцией Wоб2(р). Внешний контур корректирует работу внутреннего контура в установившемся режиме, так как возможна ошибка вследствие изменения качества топлива, погрешности датчиков и других факторов. Динамику данного контура определяют свойства датчика О2. Передаточная функция внешнего контура:
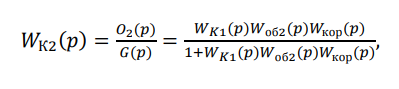
где O2(p), G(p) – выходной и входной сигналы соответственно замкнутой системы;
WK1(p) – передаточная функция внутреннего контура;
Wоб2(р) – передаточная функция участка регулирования O2;
Wкор(р) – передаточная функция корректирующего регулятора.
Предполагая, что инерционность стабилизирующего контура значительно меньше инерционности корректирующего, можно рассматриваемую двухконтурную каскадную схему АСР преобразовать в структурную схему.
Схема замкнутой одноконтурной системы автоматического регулирования изображена на рисунке 3.6, где
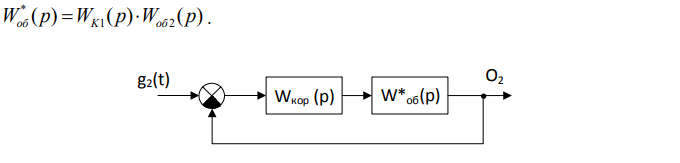
Рис. 3.6. Преобразованная структурная схема АСР расхода воздуха
Передаточная функция преобразованной замкнутой одноконтурной системы имеет вид:

Таким образом, задача исследования АСР общего воздуха сводится к исследованию полученной замкнутой одноконтурной системы, нахождению статических и динамических настроек регулятора исходя из значений, полученных на объекте.
2.4.8 Исследование автоматической системы регулирования
Определение математической модели
Параметры динамических характеристик объекта регулирования приведены в таблице 4.1.
Таблица 4.1 Коэффициенты передаточных функций объекта
| Содержание кислорода в продуктах сгорания при изменении расхода воздуха | ||||
| N, MBт | О2, % | WО2(р) | ||
| Коб, (%)/(%) | τ, с | Та, с | ||
| 44 | 6,2 | 1,03 | 35 | 110 |
| 80 | 2,4 | 0,4 | 25 | 105 |
| Содержание кислорода в продуктах сгорания при изменении расхода топлива | ||||
| N, MBт | О2, % | WО2(р) | ||
| Коб, (%)/(м3/ч) | τ, с | Та, с | ||
| 44 | 6,46 | 0,003 | 25 | 100 |
| 80 | 2,27 | 0,001 | 20 | 90 |
Аппроксимация объекта регулирования
Аппроксимация объекта регулирования осуществляется по методу Стрейца, изложенному в [11].
Так как параметры кривых разгона были получены при разных значениях нагрузки, можно выделить 4 модели объекта регулирования:
1 модель – возмущение наносится расходом воздуха при нагрузке 80МВт;
2 модель – возмущение наносится расходом воздуха при нагрузке 44МВт;
3 модель – возмущение наносится расходом топлива при нагрузке 80МВт;
4 модель – возмущение наносится расходом топлива при нагрузке 44МВт.
Все расчеты и полученные математические модели средствами MATLAB Simulink и их переходные характеристики сведены в таблицу 4.2.
Таблица 4.2Результаты аппроксимации объекта регулирования
| № | Параметр (согласно таблице [11]) | Модель 1 | Модель 2 |
| 1 | Отношение Та/ τ,с | 4,20 | 3,14 |
| 2 | Число звеньев n | 3 | 3 |
| 3 | Постоянная времени Т =Та/3,70, с | 28,38 | 29,72 |
| 4 | Время чистого запаздывания τ0=τ–(0,81Т),с | 2,01 | 10,9 |
| 5 | Математическая модель ОР | Рис. 4.1 | Рис. 4.3 |
| 6 | Переходная характеристика | Рис. 4.2 | Рис. 4.4 |
| № | Параметр (согласно таблице [11]) | Модель 3 | Модель 4 |
| 1 | Отношение Та/ τ,с | 4,50 | 4 |
| 2 | Число звеньев n | 3 | 3 |
| 3 | Постоянная времени Т =Та/3,70, с | 24,32 | 27,03 |
| 4 | Время чистого запаздывания τ0=τ–(0,81Т),с | 0,297 | 3,108 |
| 5 | Математическая модель ОР | Рис. 4.5 | Рис. 4.7 |
| 6 | Переходная характеристика | Рис. 4.6 | Рис. 4.8 |

Рис. 4.1. Математическая модель № 1 объекта регулирования
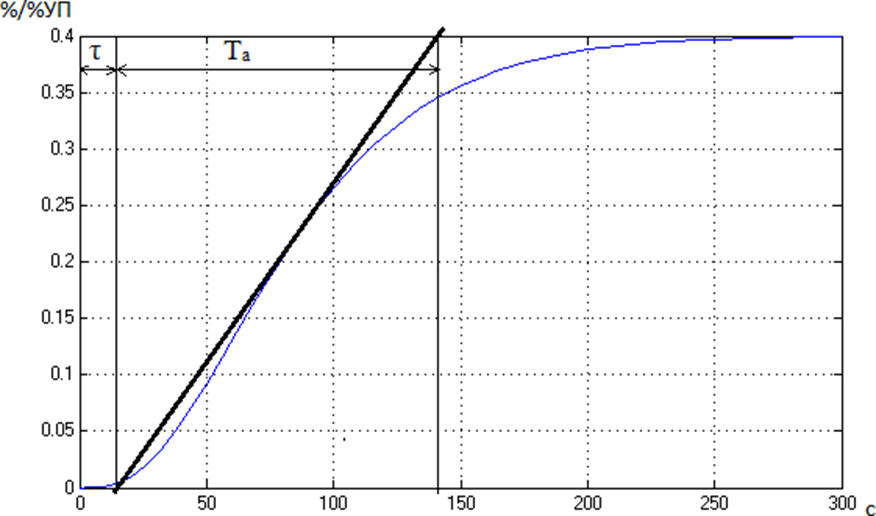
Рис. 4.2. Переходная характеристика объекта регулирования при возмущении расходом воздуха при нагрузке 80МВт τ = 17с, Та = 124с

Рис. 4.3. Математическая модель № 2 объекта регулирования
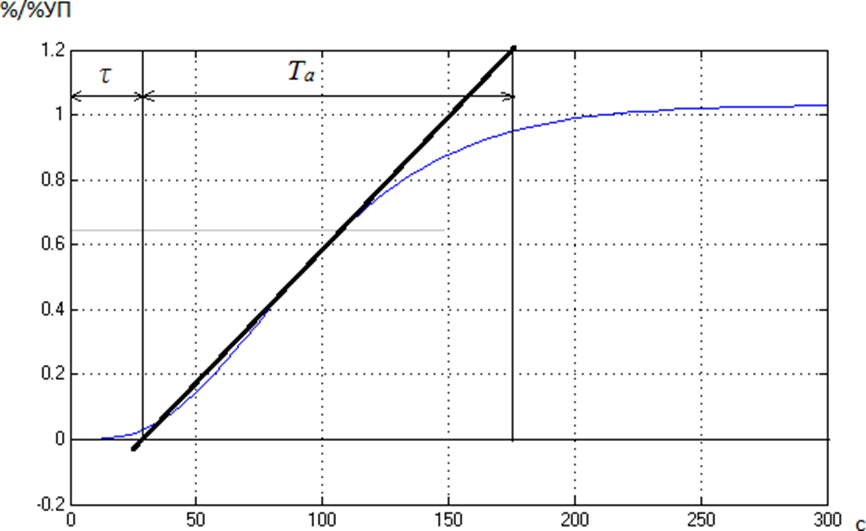
Рис. 4.4. Переходная характеристика объекта регулирования при возмущении расходом воздуха при нагрузке 44МВт τ = 27с, Та = 97с

Рис. 4.5. Математическая модель № 3 объекта регулирования
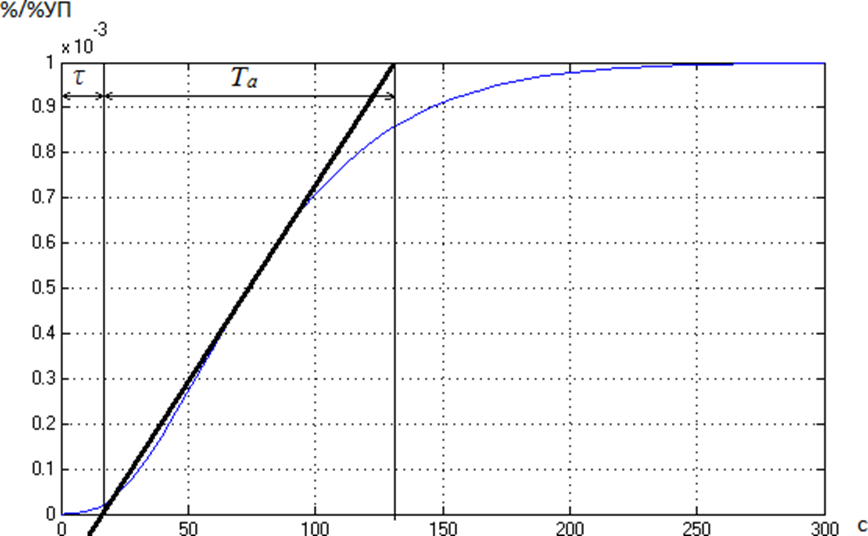
Рис. 4.6. Переходная характеристика объекта регулирования при возмущении расходом топлива при нагрузке 80 МВт τ = 19с, Та = 111с

Рис. 4.7. Математическая модель № 4 объекта регулирования
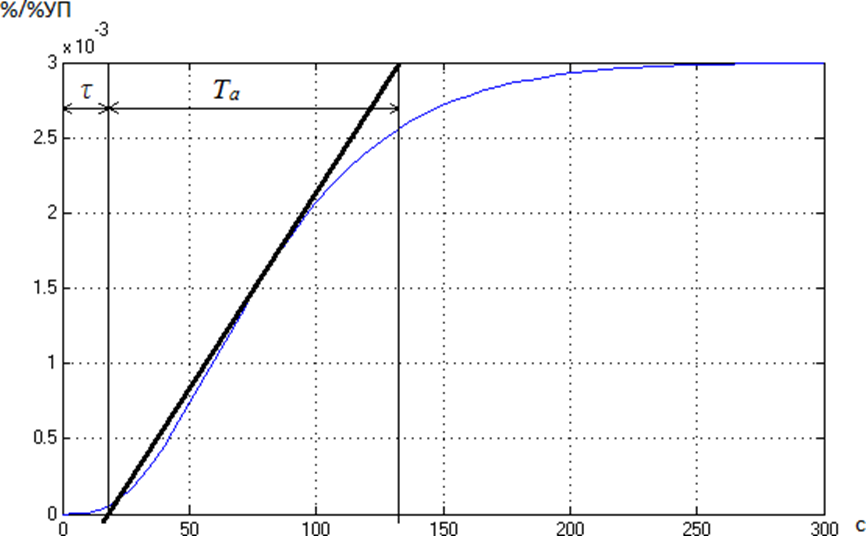
Рис. 4.8. Переходная характеристика объекта регулирования при возмущении расходом топлива при нагрузке 44 МВт τ = 19с, Та = 114с
Целью данного моделирования является определение оптимальных настроек регулятора, и поэтому необходимо, чтобы было совпадение нижних участков переходных характеристик [11], что соответствует. Данные настройки также являются условными, а более точная наладка осуществляется на объекте.
Таким образом, данные модели могут использоваться в дальнейшем исследовании.
Статическая настройка АСР
1) Расчет зоны неустойчивости. Точность поддержания регулируемого параметра при постоянной нагрузке и отсутствии возмущений на объектзоной неустойчивости . Для АСР воздуха зона нечувствительности, %,
0, 01...0, 02V,
где V– диапазон измерения параметра, V=0…25%;
(0, 01...0, 02)25 0, 25...0,5%.
2) Настройка диапазона действия задатчика. Диапазон действия задатчика настраивают по известному диапазону изменения регулируемого параметра. В современных системах, где используется микропроцессорная техника параметры, включая диапазон задатчика, задаются в ПТК при наладке на объекте.
Для рассматриваемой АСР примем диапазон действия задатчика от 0 до 10%.
Настройка АСР в среде Matlab (Определение оптимальных параметров настроек в среде Matlab)
Выбор типового регулятора АСР
Передаточная функция ПИ-регулятора представляет собой параллельное соединение пропорциональной и интегральной составляющей:
где Кр–коэффициент усиления регулятора;
Ти–постоянная времени интегратора.
Реализация ПИ-регулятора в Matlab Simulink изображена на рисунке 4.9.
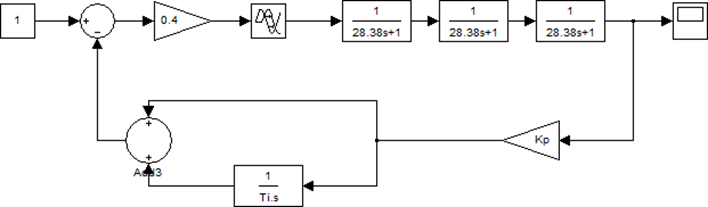
Рис. 4.9. Математическая схема модели с ПИ-регулятором
Для определения ОПН как правило используются приближенные методы, которые используют формулы и номограммы. Все методы разделяются на расчетные и экспериментальные. Рассчитаем ОПН для рассматриваемого регулятора некоторыми из них.

