Файл: Курсовая работа Теоретическая механика (семестр 4).docx
Добавлен: 10.04.2024
Просмотров: 73
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

СОДЕРЖАНИЕ
«Теоретическая механика (семестр 4)»
Схема механизма и данные для выполнения задания
2. ОПРЕДЕЛЕНИЕ ЗАКОНА ДВИЖЕНИЯ СИСТЕМЫ И РЕАКЦИЙ ВНЕШНИХ И ВНУТРЕННИХ СВЯЗЕЙ.
2.1 Определение закона движения системы
2.2 Определение реакций внешних и внутренних связей
3. ПРИМЕНЕНИЕ ПРИНЦИПА ДАЛАМБЕРА-ЛАГРАНЖА И УРАВНЕНИЙ ЛАГРАНЖА 2 РОДА
3.2 Составление дифференциального уравнения движения механизма с помощью уравнения Лагранжа 2 рода
Уравнения (2.17) составляют систему алгебраических уравнений относительно функций , , , , , , , .
3. ПРИМЕНЕНИЕ ПРИНЦИПА ДАЛАМБЕРА-ЛАГРАНЖА И УРАВНЕНИЙ ЛАГРАНЖА 2 РОДА
3.1 Составление дифференциального уравнения движения механизма с помощью принципа Даламбера – Лагранжа
Общее уравнение динамики системы есть математическое выражение принципа Даламбера-Лагранжа
| | | (3.1) |
Здесь
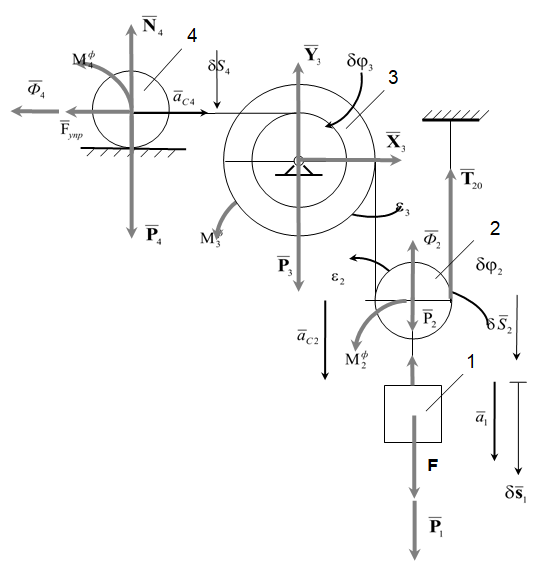
Изобразим на рисунке активные силы и силы инерции (рис. 4). Пружина является неидеальной связью. Введем реакцию этой связи в число активных сил.
Сообщим системе возможное перемещение. Составим кинематическое соотношение для системы:
Откуда


-
Расчетная схема.
Работа активной силы определяется
Работы некоторых внешних сил будут равняться нулю, т.к. они приложены в точках, скорости которых равны нулю. Как видно из расчетной схемы, таковыми являются силы
| |  | (3.2) |

где
 . (3.3)
. (3.3)В состоянии покоя системы приведенная сила равна нулю. Полагая в (3.3)
откуда определяется статическое удлинение пружины
 . (3.4)
. (3.4)Учитывая (3.2) и (3.4), получаем окончательное выражение для приведенной силы
 .
.Аналогичное выражение для приведенной силы было получено ранее (1.14).
Найдем возможную работу сил инерции:
| | | (3.5) |
Используя кинематические соотношения
, можно записать

Тогда для величин главных векторов и главных моментов сил инерции имеем следующие выражения
| | | (3.6) |
| или, | | (3.7) |
Тогда возможную работу сил инерции можно преобразовать к виду
| |  | (3.8) |
или
| | | (3.9) |
где
Аналогичное выражение для приведенной массы системы было получено ранее (1.8). Подставляя выражения (3.3) и (3.9) в общее уравнение динамики (3.1) получим
| |  | (3.10) |
Разделив (3.10) на
| | | (3.11) |
где
 ,
, Дифференциальное уравнение (3.11) полностью совпадает с уравнением (1.15) полученным ранее.
3.2 Составление дифференциального уравнения движения механизма с помощью уравнения Лагранжа 2 рода
Составим теперь уравнение Лагранжа 2-го рода. В качестве обобщенной координаты примем перемещение груза 1 – . Для механической системы с одной степенью свободы дифференциальное уравнение движения в обобщенных координатах имеет вид:
| | | (3.12) |
где – кинетическая энергия системы; – обобщенная сила; – обобщенная координата.
Составим кинематические соотношения системы:
, Вычислим кинетическую энергию системы как сумму кинетических энергий тел, образующих механическую систему.
Груз 1 совершает поступательное движение. Его кинетическая энергия равна:
| | | (3.13) |
Блок 2 и каток 4 совершают плоскопараллельное движение, поэтому
| | | (3.14) |
где
Блок 3 совершает вращательное движение около неподвижной оси. Его кинетическая энергия определяется по формуле:

