ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 24.04.2024
Просмотров: 50
Скачиваний: 0

СОДЕРЖАНИЕ
1.1 Выбор и описание грузоподъёмной машины
1.3 Формулирование требований к автоматизированному электроприводу и системе автоматизации
2.1 Расчёт нагрузок и построение механической характеристики и нагрузочной диаграммы механизма
2.2 Предварительный выбор электродвигателя по мощности
2.3 Выбор номинальной скорости двигателя и типоразмера двигателя
2.4 Построение нагрузочной диаграммы электропривода
2.5 Проверка двигателя по нагреву и перегрузочной способности
3.1 Определение возможных вариантов и обоснование выбора типа комплектного преобразователя
3.2 выбор элементов силовой цепи
3.3 Выбор датчиков регулируемых координат электропривода
4 ОПРЕДЕЛЕНИЕ СТРУКТУРЫ И ПАРАМЕТРОВ УПРАВЛЯЮЩЕГО УСТРОЙСТВА
5 РАСЧЕТ ДИНАМИЧЕСКИХ И СТАТИЧЕСКИХ ХАРАКТЕРИСТИК ЭЛЕКТРОПРИВОДА
5.1 РАСЧЕТ статических характеристик электропривода
5.2 Построение механической характеристики при динамическом торможении
6. Расчет статических и динамических характеристик разомкнутой системы.
Значение
Задаваясь значениями S в пределах от -0,001 до 1,099 находим значения
По найденным точкам строим механическую характеристику (рисунок 5.1). Значения
Для построения искусственной механической характеристики (рисунок 5.2) при частотном управлении на пониженной скорости выражается формулой, требуется посчитать угловую скорость при различной частоте, примем частоты f=6, 12, 24, 36, 48, тогда
Где,
Где,
Для жёсткой характеристики задаемся теми же значениями моментов, что и для естественной и по вышеприведенной формуле определяем
Таблица 5.1
Рассчитанные значения
и
| Естественная характеристика | Искусственная | |||||
| S | | | | | | |
| -0.001 | -7.30676 | 157.157 | -7.30676 | 18.85884 | 75.43536 | 150.8707 |
| 0.049 | 343.6529 | 149.307 | 343.6529 | 17.91684 | 71.66736 | 143.3347 |
| 0.099 | 617.8172 | 141.457 | 617.8172 | 16.97484 | 67.89936 | 135.7987 |
| 0.149 | 784.9251 | 133.607 | 784.9251 | 16.03284 | 64.13136 | 128.2627 |
| 0.199 | 860.198 | 125.757 | 860.198 | 15.09084 | 60.36336 | 120.7267 |
| 0.2395 | 875 | 119.3985 | 875 | 14.32782 | 57.31128 | 114.6226 |
| 0.249 | 874.3384 | 117.907 | 874.3384 | 14.14884 | 56.59536 | 113.1907 |
| 0.299 | 853.8928 | 110.057 | 853.8928 | 13.20684 | 52.82736 | 105.6547 |
| 0.349 | 816.4412 | 102.207 | 816.4412 | 12.26484 | 49.05936 | 98.11872 |
| 0.399 | 772.2105 | 94.357 | 772.2105 | 11.32284 | 45.29136 | 90.58272 |
| 0.449 | 726.6999 | 86.507 | 726.6999 | 10.38084 | 41.52336 | 83.04672 |
| 0.499 | 682.6692 | 78.657 | 682.6692 | 9.43884 | 37.75536 | 75.51072 |
| 0.549 | 641.3726 | 70.807 | 641.3726 | 8.49684 | 33.98736 | 67.97472 |
| 0.599 | 603.2659 | 62.957 | 603.2659 | 7.55484 | 30.21936 | 60.43872 |
| 0.649 | 568.3956 | 55.107 | 568.3956 | 6.61284 | 26.45136 | 52.90272 |
| 0.699 | 536.6102 | 47.257 | 536.6102 | 5.67084 | 22.68336 | 45.36672 |
| 0.749 | 507.6719 | 39.407 | 507.6719 | 4.72884 | 18.91536 | 37.83072 |
| 0.799 | 481.3158 | 31.557 | 481.3158 | 3.78684 | 15.14736 | 30.29472 |
| 0.849 | 457.2794 | 23.707 | 457.2794 | 2.84484 | 11.37936 | 22.75872 |
| 0.899 | 435.3168 | 15.857 | 435.3168 | 1.90284 | 7.61136 | 15.22272 |
| 0.949 | 415.2043 | 8.007 | 415.2043 | 0.96084 | 3.84336 | 7.68672 |
| 0.999 | 396.7418 | 0.157 | 396.7418 | 0.01884 | 0.07536 | 0.15072 |
| 1.049 | 379.752 | -7.693 | 379.752 | -0.92316 | -3.69264 | -7.38528 |
| 1.099 | 364.0788 | -15.543 | 364.0788 | -1.86516 | -7.46064 | -14.9213 |
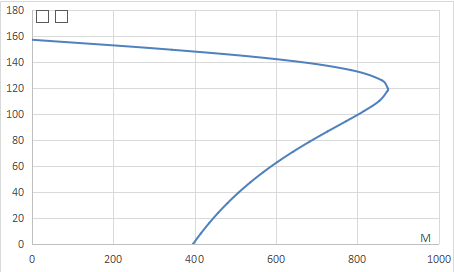
Рисунок 5.1 - График механической характеристики
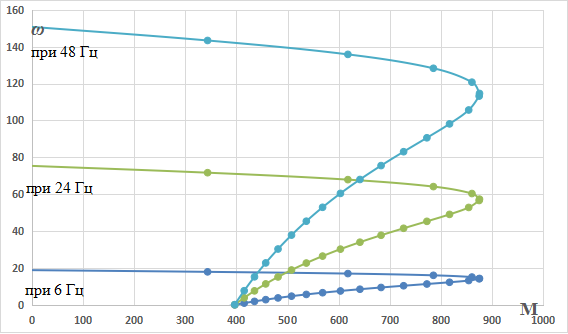
Рисунок 5.2 - График искусственной характеристики
Так как для регулирования скорости применяется ПИ регулятор, который дает нулевую статическую ошибку, поэтому механическая характеристика привода будет абсолютно жесткой
Рисунок 5.3 - График естественной механической характеристики
5.2 Построение механической характеристики при динамическом торможении
Для остановки электродвигателя применяется динамическое торможение. Электромагнитный момент, развиваемый асинхронной машиной в режим динамического торможения, определяется уравнением

Где,
Расчет механической характеристики асинхронного двигателя, работающего в режиме динамического торможения (рисунок 3.3), произведем в абсолютных значениях скорости в соответствии с выражением

подставляя в него значения скорости от 0 до 120 рад/с.
Полученные результаты сведем в таблицу 5.2.
Таблица 5.2
Значения
| | | | |
| 230 | -3594,91 | 110 | -7487,25 |
| 220 | -3757,91 | 100 | -8227,22 |
| 210 | -3936,37 | 90 | -9128,24 |
| 200 | -4132,59 | 80 | -10248,7 |
| 190 | -4349,38 | 70 | -11678,7 |
| 180 | -4590,11 | 60 | -13564,3 |
| 170 | -4859 | 50 | -16157,6 |
| 160 | -5161,28 | 40 | -19927,3 |
| 150 | -5503,54 | 30 | -25824,9 |
| 140 | -5894,27 | 20 | -35864,5 |
| 130 | -6344,5 | 10 | -51217,6 |
| 120 | -6868,87 | 0,001 | 13,43327 |
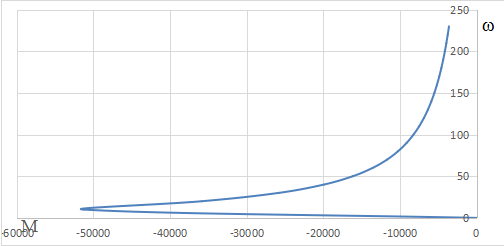
Рисунок 5.4 - Механическая характеристики асинхронного двигателя в режиме динамического торможения
6. Расчет статических и динамических характеристик разомкнутой системы.
Определим погрешность регулирования, исходя из основного уравнения динамики:
Рассмотрим два случая:
1) М=0:
Где,
 В·с/рад;
В·с/рад;2) М=Мн
Где,

