ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 24.04.2024
Просмотров: 46
Скачиваний: 0

СОДЕРЖАНИЕ
1.1 Выбор и описание грузоподъёмной машины
1.3 Формулирование требований к автоматизированному электроприводу и системе автоматизации
2.1 Расчёт нагрузок и построение механической характеристики и нагрузочной диаграммы механизма
2.2 Предварительный выбор электродвигателя по мощности
2.3 Выбор номинальной скорости двигателя и типоразмера двигателя
2.4 Построение нагрузочной диаграммы электропривода
2.5 Проверка двигателя по нагреву и перегрузочной способности
3.1 Определение возможных вариантов и обоснование выбора типа комплектного преобразователя
3.2 выбор элементов силовой цепи
3.3 Выбор датчиков регулируемых координат электропривода
4 ОПРЕДЕЛЕНИЕ СТРУКТУРЫ И ПАРАМЕТРОВ УПРАВЛЯЮЩЕГО УСТРОЙСТВА
5 РАСЧЕТ ДИНАМИЧЕСКИХ И СТАТИЧЕСКИХ ХАРАКТЕРИСТИК ЭЛЕКТРОПРИВОДА
5.1 РАСЧЕТ статических характеристик электропривода
5.2 Построение механической характеристики при динамическом торможении
6. Расчет статических и динамических характеристик разомкнутой системы.
1.3 Формулирование требований к автоматизированному электроприводу и системе автоматизации
При выборе структуры электропривода следует учитывать особенности технологического процесса, требования надежности, гибкости в управлении, удобства наладки. К электроприводам механизмов подъема мостовых кранов, которые в большинстве случаев управляются оператором, предъявляются жесткие требования к
простоте их эксплуатации и надежности при обеспечении необходимого диапазона регулирования скорости. Диапазон регулирования при подъеме и опускании номинального груза определяется минимальной скоростью при посадке грузов. Величина этого диапазона зависит от технологического процесса и номинальной грузоподъемности крана. Так, для кранов грузоподъемностью более 20 тонн среднего режима работы диапазон регулирования D≥20:1, при этом при подъёме и опускании пустого крюка скорость должна быть в 1,5-2 раза больше, чем скорость при подъёме номинального груза.
Потребность автоматизации крановых механизмов и систем представляется актуальной задачей, обусловленной существенным усложнением производственных процессов и их автоматизацией.
Кран с ручным управлениемnво многих ситуациях не соответствует требованиям гарантии заданной скорости и позиционирования при перемещении штучных грузов.
Кроме того, не обеспечивается функционирование крана с автоматической производственной системой управления (АСУ).
Управляемый оператором кран стал слабым звеном в производственной цепочке. Итак, главные предпосылки, диктующие разработку, внедрение автоматических и автоматизированных крановых систем:
1. Подъемный кран стал не просто машиной для перемещения грузов, но неотъемлемой частью производственного процесса, тесно интегрированной в технологический процесс.
2. Перемещение грузов должно выполняться по определенному временному алгоритму, в необходимой последовательности и позиционироваться с требуемой точностью, ритмично обеспечивающих выполнение технологической операции.
3. Задание на перемещение груза осуществляется непосредственно АСУ производством.
4. Необходимость обратной связи от крана, какой груз перемещен, с какого места и куда.
5. Обеспечение функционирования, исключающее нахождение людей в опасной зоне работы.
6. Целесообразность совмещения операций перемещения и взвешивания, что позволит сократить производственный цикл
7. Исключение влияния человеческого фактора.
Основные требования к системе электропривода мостового крана можно сформулировать так:
На первых положениях контроллера подъема двигатель должен развивать такой пусковой момент, чтобы исключалась возможность спуска номинального груза при напряжении питающей сети 90% номинального и в то же время желательная минимальная скорость составляла при наименьшей нагрузке не более 30% номинального значения.
При перемещении рукоятки командоконтроллера в направлении снижения скорости последняя не должна повышаться даже кратковременно. Это в первую очередь относится к переключению с первого положения в нулевое, когда запаздывание механического торможения не должно приводить к повышению малой скорости спуска.
Система электрического торможения должна иметь необходимый запас, обеспечивающий надежное замедление груза, равного 125% номинального, при напряжении питающей сети 90% номинального.
Движение груза должно происходить только в направлении, устанавливаемом командоаппаратом, даже при неисправностях в схеме. В последнем случае груз может оставаться неподвижным.
2. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ
2.1 Расчёт нагрузок и построение механической характеристики и нагрузочной диаграммы механизма
Технологические параметры механизма:
-номинальная скорость подъёма 1,33 м/с;
-максимальная высота подъёма 50 м;
-продолжительность включения 25%.
Технологический процесс представляет собой цикл, состоящий из: подъёма крюка, опускания груза, загрузки, подъёма груза на высоту, опускания груза, разгрузки.
Статическая мощность при подъёме груза:
Где, mк – масса крюковой подвески, кг
mном – номинальная масса груза, кг
υном – номинальная скорость подъёма (опускания) груза, м/c
ηnном–номинальный КПД кинематической схемы, равный произведению её отдельных элементов
g –ускорение силы тяжести, м/c2
Статическая мощность при опускании груза:
Статическая мощность при подъёме крюка:
Где,

Где, α - коэффициент, принимаемый равным 0,07;
kз – коэффициент загрузки;
Статическая мощность при опускании крюка:
Рассчитаем теперь время выполнения технологических операций:
Время подъема груза:
Время подъема крюка:
Время работы:
Рассчитаем время цикла:
Где, ПВ – продолжительность включения, %
Поскольку
Суммарное время пауз:
Примем
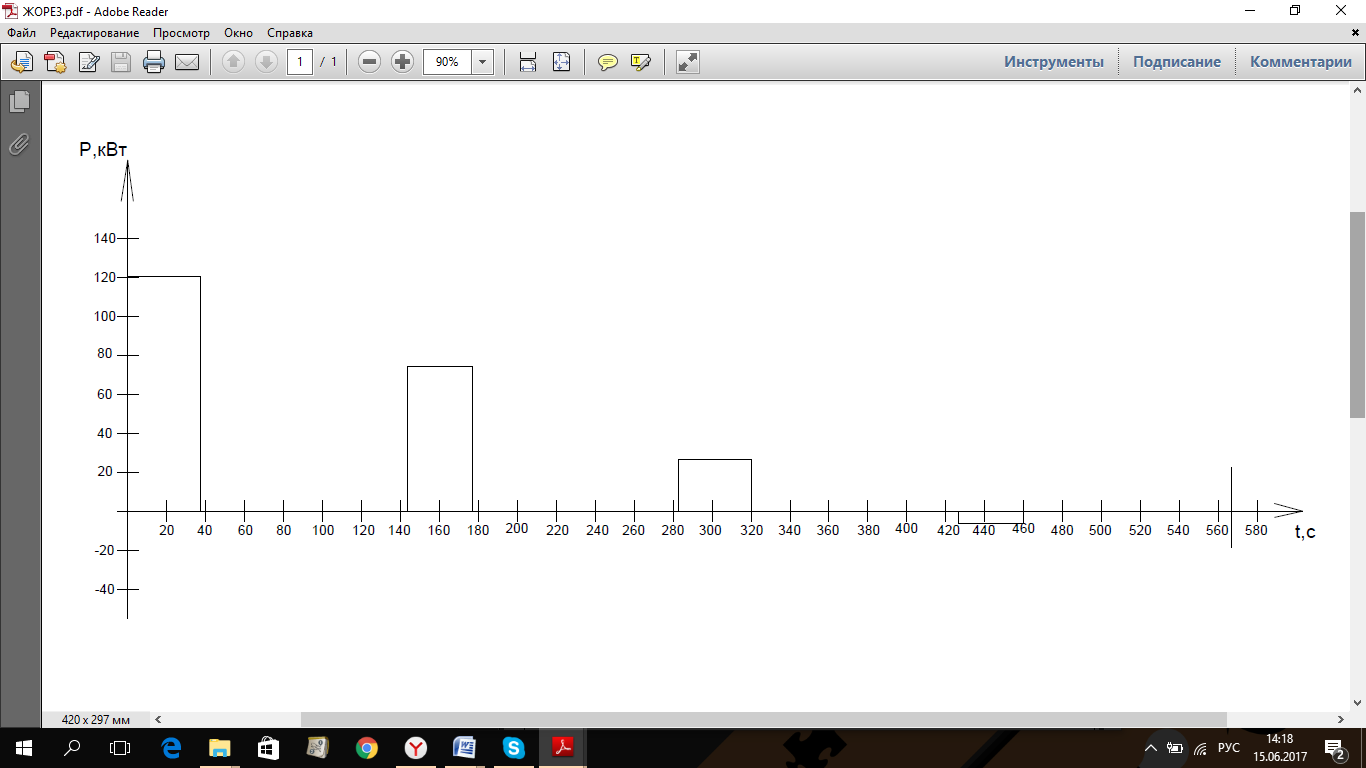
Рисунок 2.1. - Нагрузочная диаграмма механизма
10>
2.2 Предварительный выбор электродвигателя по мощности
Определяем эквивалентную мощность. Статическая эквивалентная мощность за рабочий период:
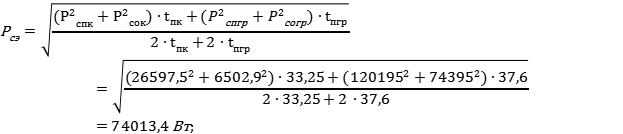
Пересчитаем эту мощность на ПВ=100%:

2.3 Выбор номинальной скорости двигателя и типоразмера двигателя
Где, Кзап = 1,4 коэффициент запаса
Из формулы найдем
В соответствии с принятым Рраcч выбираем двигатель так, чтобы Рн ≥ Рраcч. Выбираем двигатель.
Таблица 2.1
Параметры выбранного двигателя
| Номинальная мощность, Рн | 55 кВт |
| Номинальное напряжение, Uн | 380В |
| Номинальное скольжение, Sн | 0,5% |
| Номинальный КПД, | 90,5% |
| Номинальный коэффициент мощности, | 0,81; |
| Кратность максимального момента, Mmax / Mном | 2 |
| Кратность пускового момента, Mпуск / Mном | 1 |
| Кратность пускового тока, Iпуск/Iном | 5 |
Рассчитаем параметры электродвигателя: Сопротивление фазы, Ом
где I1н - номинальный фазный ток статора,
2.4 Построение нагрузочной диаграммы электропривода
Нагрузочная диаграмма электропривода используется для предварительной проверки двигателя по нагреву и перегрузочной способности. Сначала определим суммарный момент инерции электропривода в случае подъёма крюка (J2) и груза (J1).
Линейное ускорение принимаем:
Номинальная скорость двигателя:
Радиус приведения:
Допустимое угловое ускорение (замедление):
Момент инерции барабана задан:
Момент инерции электропривода при подъёме груза:

Где, ???? = 1,2 – коэффициент, учитывающий момент инерции вращающихся частей механизма
Момент инерции электропривода при подъёме крюка:
Время разгона при подъёме и опускании крюка:
Время разгона при подъёме и опускании груза:
Динамический момент электропривода Mдин определим, принимая линейный закон изменения скорости.
Динамический момент электропривода Mдин:
На каждом интервале нагрузочной диаграммы момент двигателя будем рассчитывать по следующей формуле:

