Файл: Учебное пособие соответствует рабочей программе дисциплины Строительная механика.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 03.02.2024
Просмотров: 81
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

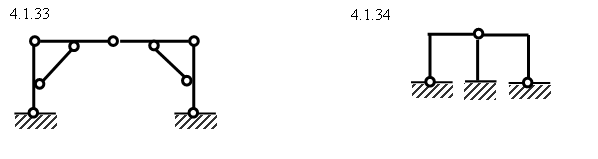
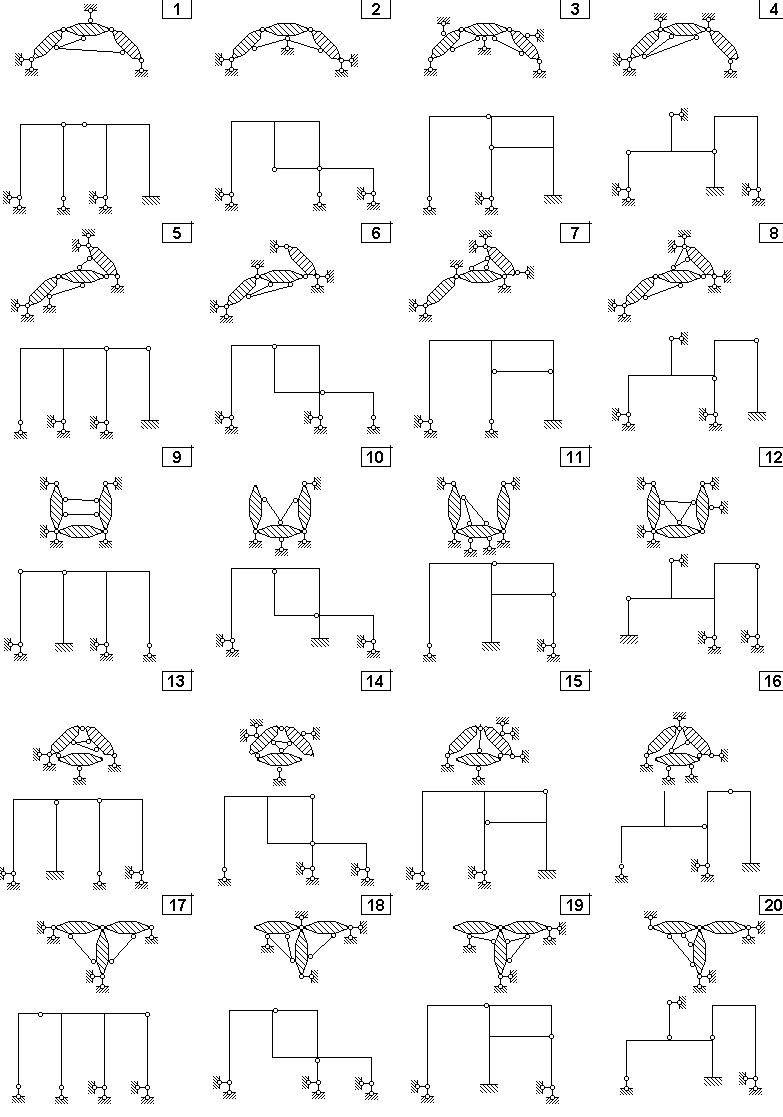
1.33 1.34
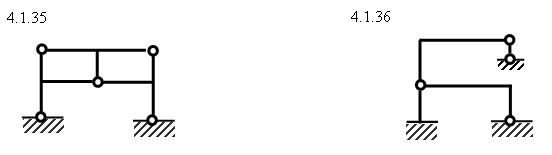
1.35 1.36
1.37 1.38

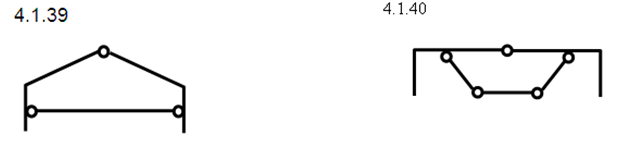
1.39 1.40
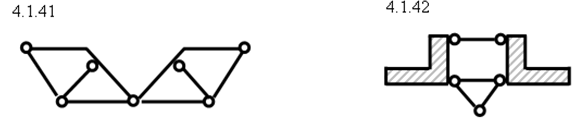
1.41 1.42
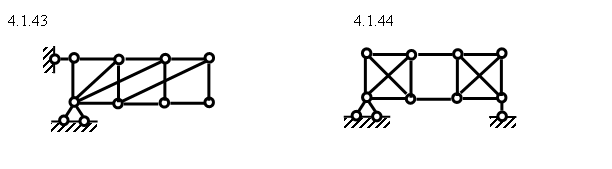
1.43 1.44
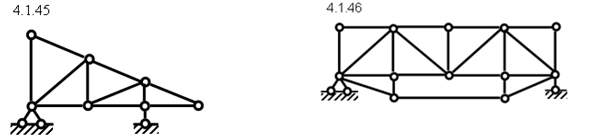
1.45 1.46
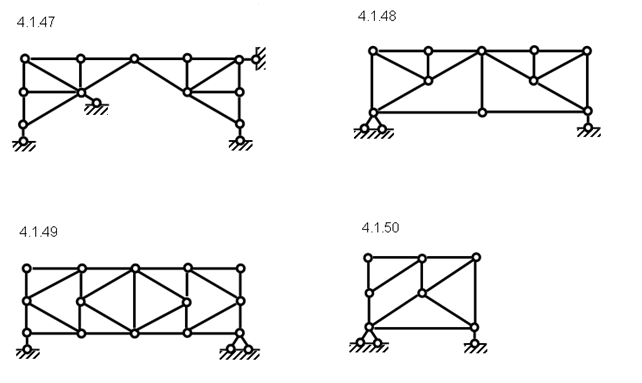
1.47 1.48

1.50
1.49
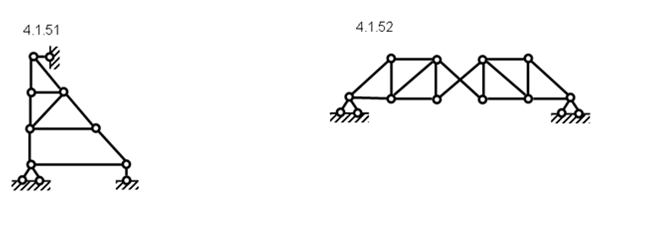
1.51 1.52
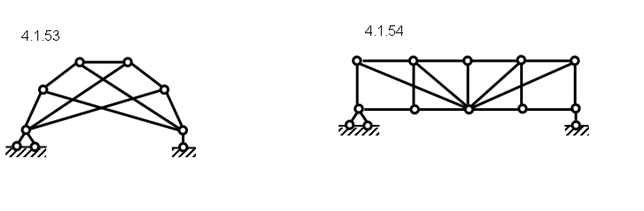
1.53 1.54
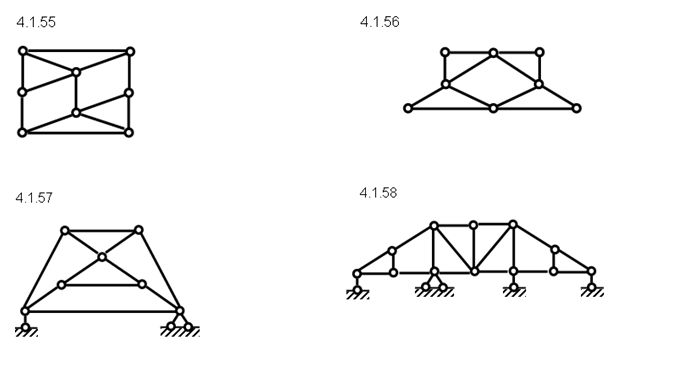
1.55 1.56
1.58
1.57
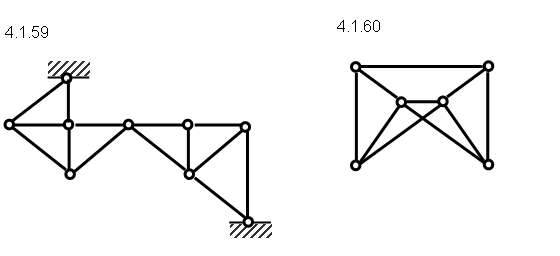
1.59 1.60
2. Тесты № 1.
«Кинематический анализ расчетных схем сооружений» [5]
| 2.1. Укажите вид стержневой системы  | 1 | Геометрически изменяемая | |||||
| 2 | Геометрически неизменяемая, статически определимая | ||||||
| 3 | Геометрически неизменяемая, статически неопределимая | ||||||
| 4 | Мгновенно изменяемая | ||||||
| 2.2. Укажите вид стержневой системы  | 1 | Геометрически изменяемая | |||||
| 2 | Геометрически неизменяемая, статически определимая | ||||||
| 3 | Геометрически неизменяемая, статически неопределимая | ||||||
| 4 | Мгновенно изменяемая | ||||||
| 2.3. Укажите вид стержневой системы  | 1 | Геометрически неизменяемая, статически неопределимая | |||||
| 2 | Геометрически неизменяемая, статически определимая | ||||||
| 3 | Мгновенно изменяемая | ||||||
| 4 | Геометрически изменяемая | ||||||
| 2.4. Какая из показанных систем – мгновенно изменяемая?  | |||||||
| 1 | 2 | 3 | 4 | ||||
| Левая | Средняя | Правая | Ни одна | ||||
| 2.5. Какая из показанных систем – мгновенно изменяемая?  | |||||||
| 1 | 2 | 3 | 4 | ||||
| Левая | Средняя | Правая | Ни одна | ||||
| 2.6. Какая из показанных систем – мгновенно изменяемая?  | |||||||
| 1 | 2 | 3 | 4 | ||||
| Левая | Средняя | Правая | Ни одна | ||||
| 2.7. Укажите номер правильной формулы для степени изменяемости стержневой системы | 1 | V = 3Д – 2Ш – С – С0 | |||||
| 2 | V = 2Д – 3Ш – С – 3 | ||||||
| 3 | V = 3Д – 2Ш – С – 3 | ||||||
| 4 | V = 3Д – Ш – С + 3 | ||||||
| 2.8. Укажите номер правильной формулы для степени изменяемости стержневой системы | 1 | V = 3Д – 2Ш – С – 3 | |||||
| 2 | V = 2Д – 3Ш – С – 3 | ||||||
| 3 | V = 3Д – 2Ш – С – С0 | ||||||
| 4 | V = 3Д – Ш – С + 3 | ||||||
| 2.9. Укажите номер правильной формулы для степени свободы стержневой системы | 1 | W = 3Д – Ш – С – С0 | |||||
| 2 | W = 3Д – 2Ш – С – С0 | ||||||
| 3 | W = 2Д – 3Ш – С – С0 | ||||||
| 4 | W = 3Д – 2Ш + С + С0 | ||||||
| 2.10. Укажите номер правильной формулы для степени свободы стержневой системы | 1 | W = 3Д – 2Ш – С – С0 | |||||
| 2 | W = 3Д – 2Ш + С + С0 | ||||||
| 3 | W = 3Д – 2Ш – С – 3 | ||||||
| 4 | W = 2Д – 3Ш – С – С0 | ||||||
| 2.11. Укажите номер правильной формулы для степени свободы шарнирно-стержневой системы | 1 | W = 2У + C – C0 | |||||
| 2 | W = 3У – 2С – С0 | ||||||
| 3 | W = 2У – С – C0 | ||||||
| 4 | W = 2У – С – 3 | ||||||
2.12. Чему равна степень свободы системы?
2.13. Чему равна степень свободы системы?
2.14. Чему равна степень свободы системы?

2.15. Чему равна степень свободы стержневой системы?
2.16. Чему равна степень свободы стержневой системы?

2.17. Чему равна степень свободы стержневой системы?

2.18. Чему равна степень изменяемости стержневой системы?

2.19. Чему равна степень изменяемости стержневой системы?

2.20. Чему равна степень изменяемости стержневой системы?

| 2.21. Необходимое условие геометрически изменяемой системы | 1 | W > 0 |
| 2 | W = 0 | |
| 3 | W ≤ 0 | |
| 4 | W < 0 | |
| 2.22. Необходимое условие геометрически неизменяемой и 2статически неопределимой системы | 1 | W < 0 |
| 2 | W = 0 | |
| 3 | W > 0 | |
| 4 | W = 1 | |
| 2.23. Необходимое условие геометрически неизменяемой и статически определимой системы | 1 | W = –1 |
| 2 | W = 0 | |
| 3 | W > 0 | |
| 4 | W < 0 |
2.24. Чему равна степень свободы стержневой системы?
2.25. Чему равна степень свободы стержневой системы?
2.26. Чему равна степень свободы стержневой системы?

2.27. Чему равна степень свободы стержневой системы?


2.28. Укажите кратность шарнира.

2.29. Укажите кратность шарнира.

2.30. Укажите кратность шарнира.

ЗАКЛЮЧЕНИЕ
В настоящем учебном пособии изложена методика выполнения кинематического анализа расчетных схем различных сооружений. Кинематический анализ должен предшествовать расчёту всегда, когда это практически возможно (для систем со сравнительно небольшим числом элементов).
К сожалению, многоэлементные, особенно пространственные, системы могут иметь достаточно сложную структуру, трудно поддающуюся исследованию с помощью рассмотренных выше приёмов, требующих использования геометрических представлений, которые плохо реализуются в компьютерных программах. В этих случаях может оказаться полезным использование аналогий с известными решениями, накопленный опыт и т.п.
Студент имеет возможность на подробных примерах не только изучить методику кинематического анализа, но и накопить опыт проведения его.
Набор большого количества решенных задач позволяет преподавателю в ограниченное время аудиторных занятий вовлечь студентов в самостоятельную работу над индивидуальными задачами и оперативно оценивать знания каждого студента.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
-
Строительная механика : учебник для вузов. В 2 кн. Кн. 1. Статика упругих систем / В.Д. Потапов, А.В. Александров, С.Б. Косицын [и др.] ; под ред. В.Д. Потапова. – М. : Высш. шк., 2007. – 511 с. -
Руководство к практическим занятиям по курсу строительной механики (статика стержневых систем) : учеб. пособие для студентов вузов / Г.К. Клейн, Н.Н. Леонтьев, М.Г. Ванюшенков [и др.] ; под ред. Г.К. Клейна. – 4-е изд., перераб. и доп. – М. : Высш. шк., 1980. – 384 с. -
Себешев, В.Г. Кинематический анализ сооружений : учеб. пособие / В.Г. Себешев ; Новосиб. гос. архит.-строит. ун-т (Сибстрин). – Новосибирск : НГАСУ (Сибстрин), 2006. – 58 с. -
Бобрин, В.А. Руководство к решению задач по строительной механике : учеб. пособие. В 3 ч. Ч. 1 / В.А. Бобрин, Л.П. Миронов ; под ред. Л.П. Миронова. – Хабаровск : Изд-во ДВГУПС, 2006. – 141с. -
Миронов, Л.П. Тесты по разделу «Кинематический анализ» : учеб. пособие / Л.П. Миронов. – Хабаровск : Изд-во ДВГУПС, 2012. – 33 с.
Приложение 1
ВАРИАНТЫ ИНДИВИДУАЛЬНОЙ РАБОТЫ № 1
«Кинематический анализ расчетных схем сооружений»




Приложение 2
ОТВЕТЫ К ЗАДАЧАМ ДЛЯ САМОСТОЯТЕЛЬНОГО РЕШЕНИЯ [4]
Сокращения в ответах:
ГН – геометрически неизменяемая,
ГИ – геометрически изменяемая,
МИ – мгновенно изменяемая,
СО – статически определимая,
СН(n) – n раз статически неопределимая.
| 1.1. W = 0 ГН СО | 1.2. W = 0 ГН СО | 1.3. W = 0 ГН СО |
| 1.4. W = –1 ГН СН(1) | 1.5. W = –2 ГН СН(2) | 1.6. W = 0 ГН СО |
| 1.7. W = –1 ГН СН(1) | 1.8. W = 0 ГИ | 1.9. W = 0 ГИ |
| 1.10. W = 0 МИ | 1.11. W = –1 ГН СН(1) | 1.12. W = 0 ГН СО |
| 1.13. W = 0 ГИ | 1.14. W = –1 ГН СН(1) | 1.15. W = –1 ГН СН(1) |
| 1.16. W = –2 ГН СН(2) | 1.17. W = –1 ГН СН(1) | 1.18. W = 1 ГИ |
| 1.19. W = 0 ГН СО | 1.20. W = –2 ГН СН(2) | 1.21. W = 0 ГН СО |
| 1.22. W = –1 ГН СН(1) | 1.23. W = 0 ГИ | 1.24. W = 1 ГИ |
| 1.25. W = 0 ГН СО | 1.26. W = 0 ГН СО | 1.27. W = 0 ГН СО |
| 1.28. W = 1 ГИ | 1.29. W = –1 ГН СН(1) | 1.30. W = 0 МИ |
| 1.31. W = 0 ГН СО | 1.32. W = –2 ГН СН(2) | 1.33. W = 0 ГН СО |
| 1.34. W = –2 ГН СН(2) | 1.35. W = –3 ГН СН(3) | 1.36. W = –1 ГН СН(1) |
| 1.37. W = –2 МИ | 1.38. W = –3 ГН СН(3) | 1.39. V = 0 ГН СО |
| 1.40. V = 2 ГИ | 1.41. V = –1 ГИ | 1.42. V = 1 ГИ |
| 1.43. W = 0 ГН СО | 1.44. W = –1 ГИ | 1.45. W = 0 ГН СО |
| 1.46. W = –1 ГН СН(1) | 1.47. W = 0 МИ | 1.48. W = 0 ГН СО |
| 1.49. W = 0 ГН СО | 1.50. W = 0 ГН СО | 1.51. W = 0 МИ |
| 1.52. W = 0 ГН СО | 1.53. W = 0 ГН СО | 1.54. W = 0 ГН СО |
| 1.55. V = 0 ГИ | 1.56. V = 1 ГИ | 1.57. W = 0 МИ |
| 1.58. W = 0 МИ | 1.59. W = 0 МИ | 1.60. V = –1 ГН СН(1) |