Файл: Федеральное агентство морского и речного транспорта арктический морской институт имени в. И. Воронина.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 16.03.2024
Просмотров: 62
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
В отчетепривести пример по своему судну.
3. Информация об остойчивости капитану, ее виды. Требования к грузовому плану судна на предстоящий рейс.
Дать описание, в отчете привести пример, составить примерный грузовой план для своего судна.
4. Грузовая шкала, грузовой размер. Определение грузоподъемности судна на рейс. Определение количества выгруженного (погруженного) груза по осадке (Draught survey). Определение водоизмещения судна по измеренным осадкам, по маркам углубления.
Дать описание, в отчете привести пример по своему судну.
5. Подготовки грузовых помещений судна к грузовым операциям.
В отчете привести пример по своему судну.
6. Размещение и складирование грузов в трюмах.
Дать описание, в отчете привести пример, нарисовать схему размещения.
7. Укладка и крепление лесных грузов на судах.
Дать описание, в отчете привести пример, нарисовать схему крепления.
8. Выполнение требований по сохранности и безопасности при перевозке грузов на судах, выполнение правил охраны труда, техники безопасности, пожаробезопасности при проведении погрузочно-разгрузочных работ на морских судах.
В отчете привести пример по своему судну.
ПМ. 04 Анализ эффективности работы судна
ПК 4.1. Оценивать эффективность и качество работы судна
ПК 4.2. Находить оптимальные варианты планирования рейса судна, технико-экономических характеристик эксплуатации судна.
ПК 4.3. Использовать современное прикладное программное обеспечение для сбора, обработки и хранения информации и эффективного решения различных задач, связанных с эксплуатацией судна.
1. Выбор оптимального плана рейса судна.
В отчете привести пример по своему судну.
2. Расчет технико-экономических характеристик эксплуатации судна.
3. Расчеты эффективности технической эксплуатации судна.
В отчете привести пример по своему судну.
4. Расчеты провозной способности, транспортных издержек и эксплуатационных расходов СЭУ.
В отчете привести пример по своему судну.
5. Описание применяемого на судне программного обеспечения для оценки эффективности работы и выбора оптимального плана рейса.
IIIОСНОВНАЯЧАСТЬ
ПМ 01.Управление и эксплуатация судна.
ПК 1.1. Планировать и осуществлять переход в точку назначения, определять местоположение судна.
1.5 (К 1). Планирование и осуществление перехода и определение местоположения
-
По двум светилам
1. измерить высоты светил навигационным секстаном;
2. исправить измеренные высоты светил всеми поправками и получить значения обсервованных геоцентрических высот этих светил (hО1 и hО2);
3. привести высоты светил к одному моменту времени (как правило, ко времени измерения высоты последней звезды) и получить приведенное значение высоты одного из светил (h'О1);
4. вычислить значения счислимых высот (hC1 и hC2) и азимутов (АC1 и АC2) светил для координат счислимого места судна (φc и λc), используя астрономические таблицы или по формулам;
5. рассчитать элементы каждой ВЛП относительно счислимого места судна
(ВЛП1 → AC1, n1 = h' О1 – hC1; ВЛП2 → AC2, n2 =hО2 – hC2) ;
6. построить высотные линии положения на путевой навигационной карте (на бланке или на манёвренном планшете, применяя угловой масштаб) определить обсервованные координаты (φ0 и λ0), как координаты точки пересечения ВЛП1(«I–I») и ВЛП2 («II–II»)
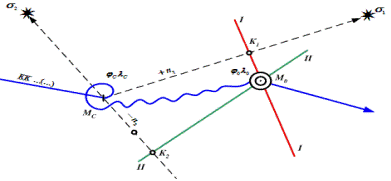
Рисунок 5. Определение места судна по наблюдениям двух светил
-
По двум пеленгам
Способ определения места судна по двум пеленгам — один из наиболее распространенных при плавании в узкостях или вдоль берега, вблизи навигационных опасностей. Это объясняется тем, что часто в видимости судна большего количества ориентиров, нанесенных на карту, одновременно не бывает. Определяемым навигационным параметром является истинный пеленг на навигационный ориентир. Навигационному параметру соответствует навигационная изолиния ИП = const, которая называется изопеленгой или изоазимутой. Изоазимута представляет собой линию, проходящую через навигационный ориентир и место судна. Градиент пеленга определяется выражением g = l/D. Он направлен по нормали в сторону возрастания пеленга. Обсервованную точку получают в пересечении двух линий положения, которыми являются линии истинных пеленгов. Кроме того, так как одновременно пеленговать два ориентира один наблюдатель не может, то для уменьшения или практически полного уничтожения ошибки из-за неодновременности пеленгования применяют специальные приемы. В быстрой последовательности берут пеленги двух объектов (маяков, знаков, мысов и др.) с таким расчетом, чтобы угол между направлениями на них был по возможности близким к 90° но, во всяком случае, не меньше 30° и не больше 150°. Первым пеленгуют ориентир, расположенный ближе к диаметральной плоскости (ДП) судна, т. е. находящийся на более остром курсовом угле. Пеленг в этом случае меняется медленно. При ночном пеленговании порядок будет зависеть от характеристики огня. Первым пеленгуют огонь, у которого более редкие проблески, или тот, который пеленгуется с трудом из-за плохой видимости или удаленности. Если скорость судна более 10 узлов и расстояния до ориентиров незначительны (2—3 мили), измеренные пеленги необходимо приводить к одному моменту. Для этого берут компасный пеленг первого ориентира, затем второго, после чего вновь пеленгуют первый ориентир. Значения двух пеленгов первого ориентира усредняют, приводя тем самым средний пеленг к моменту пеленгования второго ориентира:

ОКП=(ОКП1+ОКП1)/2
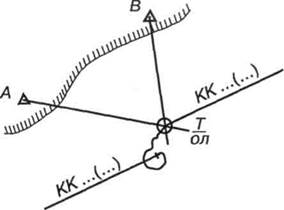
Рисунок 6. Определение места судна по наблюдениям двух пеленгов
- 1 2 3 4 5 6 7
По трём пеленгам
Рассмотренный выше способ обладает существенным недостатком — отсутствием контрольной линии положения, что не дает возможности выявить возможный промах при измерении пеленгов. Для повышения надежности обсерваций и объективного суждения о поправке компаса производится пеленгование третьего ориентира. При измерении пеленгов трех ориентиров судоводитель получает три линии положения, которые при отсутствии погрешностей в пеленгах пересекаются в одной точке. Эта точка и является обсервованным местом судна. Перед измерением пеленгов выбирают на берегу три ориентира с расчетом, чтобы углы между их пеленгами были от 60 до 120°, и намечают порядок пеленгования. В общем случае первыми берут пеленги ориентиров, расположенных дальше от траверза, т. е. на более острых курсовых углах. Направления на них меняются медленнее и, следовательно, неодновременность пеленгования меньше будет сказываться на точности полученного места. Ночью, чтобы сократить время между моментами пеленгования, этот порядок может быть изменен. Первыми пеленгуют маяки, на измерение пеленгов которых затрачивают больше времени. Например, если в видимости судоводителя имеются проблесковые и постоянные огни, то первыми, дождавшись проблеска, пеленгуют проблесковые огни, а затем — постоянные. После опознания ориентиров, быстро и последовательно производится их пеленгование. При скорости судна более 10 узлов и незначительных расстояниях до ориентиров взятые пеленги приводят к одному моменту, измеряя их в таком порядке: три пеленга берут в обычной последовательности, а затем повторно измеряют пеленги второго и вслед за ним первого ориентира. Время и отсчет лага замечают при взятии третьего пеленга. Для исправления поправкой компаса и прокладки на карте получают три отсчета компасных пеленгов:
ОКП1=(ОКП1I+ОКП1II)/2
ОКП2=(ОКП2I+ОКП2II)/2
ОКП3 остается без изменений.
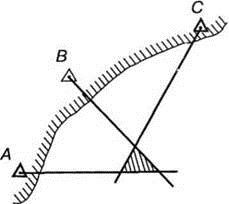
Рисунок 7. Определение места судна по наблюдениям трёх пеленгов
-
По двум расстояниям
Циркулем на карте (в районе широты плавания) снимается расстояние, равное DA M, затем ножка (иголка) циркуля устанавливается в место обозначения маяка А и на карте проводится дуга окружности аа'. Аналогично проводится дуга вв' радиусом равным D
B M. Точка пересечения этих дуг даст обсервованное место - О.
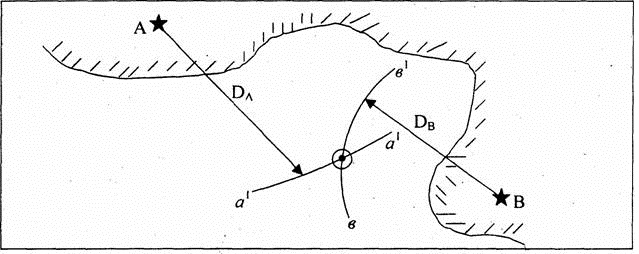
Рисунок 8. Определение места судна по двум расстояниям
-
По трём расстояниям
Для получения обсервованного места, достаточно одновременно (или почти одновременно) измерить расстояния до трех ориентиров. Точка пересечения навигационных изолиний – окружностей (их дуг) радиусами D1, D2 и D3– даст нам обсервованное место судна.

Рисунок 8. Определение места судна по трём расстояниям
-
По расстоянию и пеленгу
Этот способ применяется в тех случаях, когда в пределах видимости находится только один ориентир, нанесенный на карте. Сущность способа заключается в том, что, измерив расстояние до ориентира и взяв на него пеленг по компасу, обсервованное место получается в точке пересечения двух линий положения - пеленга и дуги окружности.
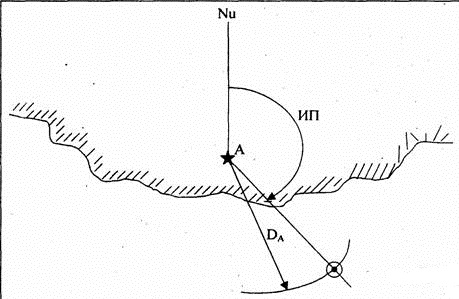
Рисунок 9. Определение места судна по пеленгу и расстоянию
-
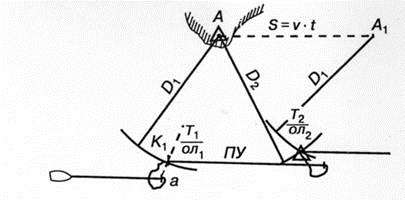
По крюйс-пеленгу
Этот способ применяется в случаях, когда виден только один ориентир, расстояние до которого измерить не представляется возможным. Сущность состоит в том, что ориентир пеленгуется дважды в различные моменты времени и место судна определяется на момент взятия второго пеленга. При этом определение производится с учетом курса и пройденного расстояния за время между пеленгованиями. Полученное место судна называется счислимо-обсервованным и обозначается на карте треугольником в месте пересечения линий положения.
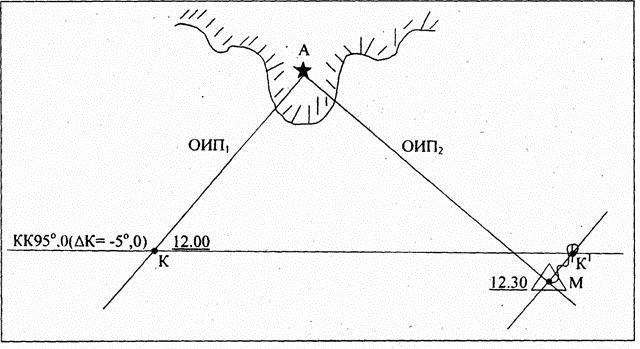
Рисунок 10. Определение места судна по крюйс-пеленгу
-
По крюйс-расстоянию
При определении расстояния с помощью вертикального угла и отсутствии возможности пеленгования ориентиров, использования судовой радиолокационной станции при больших ошибках радиолокационного пеленга, место судна можно получить способом крюйс-расстояния.