Файл: Навигационная гидрографическая и гидрометеорологическая характеристика районов плавания по маршруту перехода.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 19.03.2024
Просмотров: 81
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

СРНС “Навстар” состоит из космического сегмента, сегмента контроля и пользовательского сегмента.
Космический сегмент образуют 24 спутника, которые находятся на шести орбитах (по 4 спутника на каждой) на высоте 20 200 км. Период их обращения составляет около 12 часов, угол наклона орбиты относительно плоскости экватора – 55 градусов.
Система работает в двух режимах: режим PPS (высокая точность измерения) и режим SPS (стандартная точность измерений). Режим PPS используется военными и обеспечивает точность до 1 м, а режим SPS для всех потребителей и обеспечивает точность определения места до 100 м.
Спутники системы используют свои сигналы на двух частотах: ƒ1=1227.6мгц (диапазон L1) и ƒ2=1575.4мгц 9 (диапазон L2). В диапазоне L1 измеряются сигналы, предназначенные для гражданских потребителей, а также сигналы военного кода “P” в режиме PPS. Диапазоне L2 передаются сигналы только военного кода.
Сегмент контроля – это станции наблюдения, расположенные на Гавайях, островах Вознесения и Диего-Гарсия и других точках Земного шара, а также главная контрольная станция, расположенная на базе ВВС в Колорадо.
Станции наблюдения следят за спутниками, записывая всю информацию об их движении. Эта информация передается на главную командную станцию для корректировки орбит и навигационной информации.
Пользовательский сегмент – это приемники пользователей, где производится обработка данных и определение координат скоростей и времени.
Глава 3
Анализ навигационной безопасности плавания.
3.1 Определение допустимой погрешности плавания.
Важной характеристикой безопасности судовождения является величина погрешности в текущем месте судна. Однако она сама по себе без ее сопоставления с конкретной навигационной обстановкой не может служить показателем навигационной безопасности. Например: погрешность с текущем месяце, равна 1.5 мили, для открытого моря – нормально, а для плавания в узкости много.
Основным показателем навигационной безопасности является допустимая погрешность плавания в данном районе.
Допустимой погрешностью (Mд) называется предельная погрешность текущего места судна, при которой с заданной вероятностью безопасность плавания еще сохраняется.
Допустимая погрешность зависит от района плавания. При плавании по фарватерам она имеет одно значение, а при плавании в открытом море – другое.
В 1983г Международная морская организация (ИМО) приняла рекомендацию, в которой установлены следующие требования:
-
В районах, в которых ограничена свобода маневра судна, при подходе к портам и при входе в них плавание, точность плавания должна устанавливаться в местных правилах плавания. -
В других районах допустимая погрешность места судна с вероятностью 95% не должна превышать 4% от расстояния до ближайшей опасности, при этом максимальное значение погрешности не должно превышать 4 мили.
Величина максимальной погрешности плавания может задаваться, а может и не задаваться на период. Если она не была задана, то производится ее расчет по участкам маршрута перехода.
При плавании в открытом море, но где имеются навигационные опасности, допустимая погрешность может быть рассчитана по формуле (1)
МД ≤ ДR (мили)
Где: МД – ожидаемая точность плавания, мили.
Д – минимальное расстояние до навигационной опасности, мили.
R – значение которое определяется из таблицы 1-В МТ-75 по заданной вероятности безопасного плавания при e = 1
При плавании по фарватеру, шириной d, за критерий безопасности плавания принимается предельно допустимая погрешность счислимого места по направлению перпендикулярному оси фарватера, равна половине его ширине (рис.)
Рисунок №1.
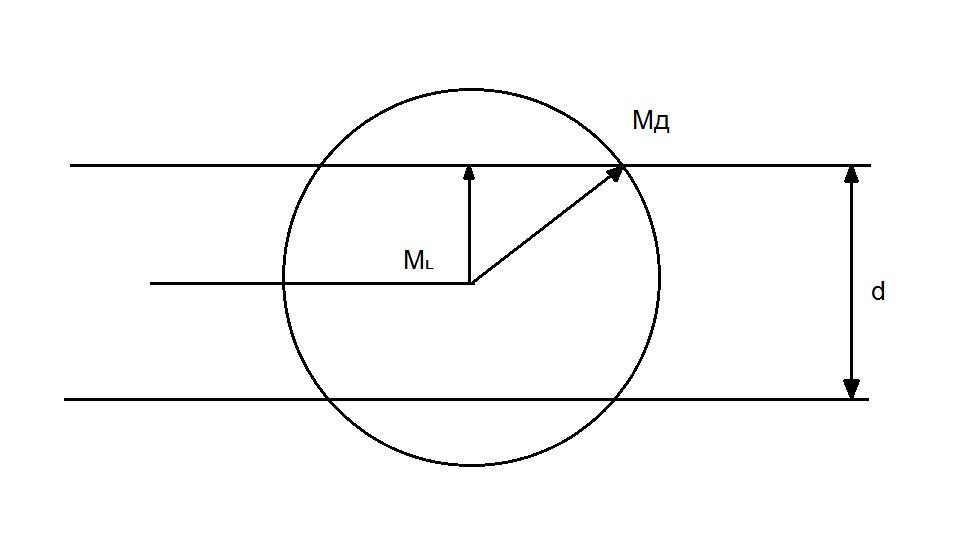
ML =
 =ZML= 0,7 Mд отсюда:
=ZML= 0,7 Mд отсюда:(2)
Mд=
 (мили)
(мили)Где: Z –функция Лапласа, выбираемая из таблицы 1-б МТ-75 по заданной вероятности.
При проходе узкости пролива, в которой навигационные опасности расположены по обе стороны линии пути, Мд можно определить по формуле (3): Mд<Д (мили) (3)
Где Д –минимальное расстояние до навигационной опасности, лини.
Величины допустимой погрешности разработаны приведены как в международных, так и наших региональных документах (МТ-2000)
I. Международные нормативы точности судовождения:
-
При плавании в зоне открытого моря

-
В дневное время – 2.0 мили -
В ночное время – 3.0 мили
-
При плавании в прибрежной зоне Mд ≤ 2 мили -
При плавании по фарватерам Mд = 0.5
II. Отечественные нормативы:
-
При плавании в зоне открытого моря – Mд = 2% от расстояния до навигационной опасности, но не более 2.0 миль. -
При плавании в прибрежных водах, в расстоянии от берега более 25 миль допускается погрешность не более 2.0 миль. -
При плавании по фарватерам шириной до 20 кбт.
Mд = 0.2 ширины фарватера.
Используя эти требования, принимаю для расчетов следующие величины допустимых погрешностей:
I участок (Балтийское море) – Mд = 1.5 мили
II участок (Балтийские проливы) – Mд = 0.5 мили
III участок (Северное море) – Mд = 1.0 миля
IV участок (Пролив Ла–Манш) – Mд = 0.5 мили
V участок (Атлантический океан) – Mд = 2.0 мили
VI участок (пролив Гибралтар) – Mд = 0.5 мили
VII участок (Средиземное море) – Mд = 2.0 мили
VIII участок (Эгейское море) – Мд= 2.0 мили
IX участок (Пролив Дарданеллы) – Мд= 0.5 мили
X участок (Мраморное море) – Мд= 2.0 мили
XI участок (Пролив Босфор) – Мд= 0.5 мили
XII участок (Черное море) – Мд= 2.0 мили
3.2 Расчет ожидаемой точности обсерваций.
Рассмотрим возможные способы обсерваций по участкам перехода:
Балтийское море
-
Основной способ обсерваций: по ИФ РНС “РСДН-3” -
Контролирующие способы:
-
по небесным светилам -
по спутниковым системам
Балтийские проливы
-
Основные способы:
-
с использованием судовой РЛС -
визуальными способами
-
Контролирующие способы:
-
по спутниковым системам -
по круговым р/ маякам
Северное море
-
Основной способ обсерваций: по ИФ РНС “Лоран-С” -
Контролирующие способы:
-
по спутниковым системам -
по небесным светилам
Пролив Ла-Манш
-
Основной способ:
-
с использованием судовой РЛС
-
Контролирующие способы:
-
визуальные способы -
по спутниковым системам -
по круговым р/маякам
Атлантический океан
-
Основной способ: по ИФ РНС “Лоран-С” -
Контролирующие способы:
-
по небесным светилам -
по круговым р/маякам -
по спутниковым системам
Гибралтарский пролив
-
Основной способ – с помощью судовой РЛС -
Контролирующие способы:
-
визуальные способы -
по спутниковым системам
Средиземное море
-
Основной способ: по ИФ РНС “Лоран-С” -
Контролирующие способы:
-
по спутниковым системам -
по небесным светилам -
с помощью судовой РЛС
Эгейское море
-
Основной способ: по ИФ РНС “Лоран-С” -
Контролирующие способы:
-
по спутниковым системам -
с помощью РЛС -
по небесным светилам
Пролив Дарданеллы
-
Основной способ: по судовой РЛС -
Контролирующие способы:
-
визуальные способы -
по круговым р/маякам -
по спутниковым системам
Мраморное море
-
Основной способ: по ИФ РНС “Лоран-С” -
Контролирующие способы:
-
по спутниковым системам -
по небесным светилам -
с помощью РЛС
Пролив Босфор
-
Основной способ: с помощью РЛС -
Контролирующие способы:
-
визуальные способы -
по круговым р/маякам -
по спутниковым системам
Черное море
-
Основной способ: по ИФ РНС “Лоран-С” -
Контролирующие способы:
-
по спутниковым системам -
по небесным светилам -
с помощью РЛС
Произведем расчеты ожидаемой точности обсерваций для различных способов обсерваций по средним величинам погрешностей навигационных параметров.
-
ИФ РНС “РСДН-3” и “Лоран-С”
Ср. кв. погрешность при определении места по этим светилам в среднем составляет при использовании приемоиндикатора “КПИ-5Ф” составляет:
mu=0.8 мили – днем и mu= 1.5Мксек. – ночью
При средних условиях величине ср. кв. погрешности линий положения составляет: М0 =
Значение ср. кв. погрешности обсерваций по ИФ РНС “РСДН-3” и “Лоран-С” приведены в таблице № 3
Таблица № 3
| Мо | Θ | 30° | 40° | 50° | 60° | 70° | 80° |
| Днем | 1.12 | 0.87 | 0.73 | 0.65 | 0.6 | 0.57 | |
| Ночью | 2.8 | 2.2 | 1.8 | 1.6 | 1.5 | 1.4 | |
-
С использованием судовой РЛС (по трем ориентирам)
Погрешность измеренного с помощью судовой РЛС “Наяда” расстояние на шкале 16 миль составляет 0.01 от шкалы дальности, т.е. МД =0.16 мили. Согласно хорошей морской практике обсервацию по РЛС для большей надежности рекомендуется производить по трем ориентирам. В этом случае погрешность обсервации определяется по формуле № 7 и составляет 0.19 мили.
-
По визуальным пеленгам.
Погрешность измерения компасного пеленга на береговой ориентир с помощью пеленгатора “ПГК-2” составляет mu = 0°,5.
Погрешность линии положения визуального пеленга может быть рассчитана по формуле №8
(8) М0=

Для средних расстояний до ориентиров 8÷12 миль и mu = 0°,5 погрешность линии положения составит 0.09 мили.
Произведем расчет ожидаемой погрешности точной обсервации по двум пеленгам при мили в зависимости от угла пересечения линий положения.
| Θ | 20° | 30° | 40° | 50° | 60° | 70° | 80° | 90° |
| Мо | 0.37 | 0.25 | 0.20 | 0.16 | 0.15 | 0.14 | 0.13 | 0.12 |
При определении места по трем пеленгам точность обсервации составляет Mo = 0.1 мили.
-
По круговым р/маякам.
При среднем расстоянии до радиомаяков в 50 миль погрешность обсервации по трем р/маякам составит
Млп=
 =
= =1,3 мили,
=1,3 мили,М0=1,2mлспр=1,6 мили
При среднем расстоянии до р/маяков в 100 миль погрешность обсервации составляет:
Mлп=
Мо=1,2Млпср=3,1 мили