ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 28.04.2024
Просмотров: 66
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

СОДЕРЖАНИЕ
Лабораторная работа «Исследование устойчивости и качества линейных систем управления».
Лабораторная работа «Исследование влияние нулей и полюсов передаточной функции на свойства системы».
Лабораторная работа «Исследование дискретных линейных систем»
Лабораторная работа «Исследование адаптивной системы управления»
Лабораторная работа «Исследование оптимальных по быстродействию процессов»
Лабораторная работа «Исследование системы экстремального управления».
-
-
-
В итоге алгоритм подстройки коэффициента к имеет следующий вид
-
-
-
-
При этом структура адаптивной системы будет иметь следующий вид (рисунок 4.2.3)
-
-
Рисунок 4.2.3 – Структурная схема адаптивной системы -
-
Перестройка k осуществляется блоком умножения в цепи обратной связи основного контура.-
Порядок выполнения работы
-
Варианты заданий: -
№
варианта
a0+ k0
a
f
λ
А
1
-
1
-
[1;0.1;1.5]
-
0.1
-
[1;1;5]
-
1
2
-
2
-
[2.5;0.1;3]
-
0.5
-
[-1;1;3]
-
0.1
3
-
0.5
-
[1.5;0.2;2.5]
-
0.1
-
[2;0.5;4.5]
-
0.5
4
-
4.5
-
[1;0.5;3]
-
0.8
-
[20;5;40]
-
1
5
-
3
-
[2.5;0.3;4]
-
0.5
-
[7;2;14]
-
0.7
6
-
3.5
-
[-1;0.1;-1.5]
-
0.3
-
[0.1;0.7;3]
-
1
7
-
1
-
[0.1;0.2;1]
-
0.8
-
[1.5;0.1;2]
-
0.5
8
-
1
-
[1.1;0.1;1.6]
-
0.1
-
[-5;2;3]
-
0.1
9
-
2.5
-
[-2;0.5;2]
-
1
-
[0.1;1;5]
-
0.2
10
-
4
-
[2;0.5;5]
-
0.4
-
[3;1.5;7]
-
1
-
-
-
-
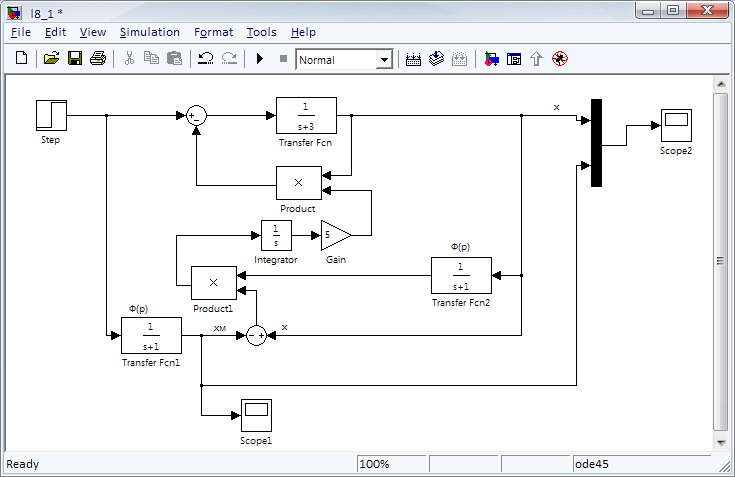
Собрать структурную схему, как показано на рисунке 4.2.4
-
-
-
Рисунок 4.2.4 – Структурная схема исследования -
-
В работе исследуются процессы стабилизации динамических характеристик системы при изменении ее параметров. Основными параметрами будем считать:
-
Время настройки параметров (при скачкообразном их изменении), -
Диапазон допустимых отклонений параметров, -
Устойчивость процессов настройки, -
Устойчивость процессов настройки при разных входных сигналах, -
Точность системы, которая оценивается по степени отклонения х от хм, т.е. .
.
-
При выполнении работы необходимо оценить указанные показатели при подаче на вход сигналов g(t)=1(t); g(t)=Asin(ωt) (при различных ω, А) по построенным графикам переходных процессов в системе.-
-
Список контрольных вопросов
-
-
-
Что такое адаптивные системы -
В каких случаях целесообразно использовать адаптивное управление? -
Какие классы адаптивных систем вам известны? -
Что такое эталонная модель? -
В чем сущность прямого метода Ляпунова?
-
Содержание отчета
-
-
Краткое описание и структура схемы исследуемой системы. -
Графики переходных процессов с необходимыми пояснениями. -
Краткие выводы.
-
- 1 ... 4 5 6 7 8 9 10 11 12
-
Лабораторная работа «Исследование оптимальных по быстродействию процессов»
-
-
Цель работы: Изучение характера и закономерностей, оптимальных по быстродействию процессов в системах второго порядка на фазовой плоскости. -
Теоретическая часть
-
Задача оптимального по быстродействию управления объектом с одномерным входом состоит в определении управления u(t) и траектории x(t), минимизирующих функционал при соблюдении ограничения вида
при соблюдении ограничения вида  , примем в дальнейшем Umax=1.
, примем в дальнейшем Umax=1. -
Для линейного объекта второго порядка, например, с передаточной функцией на основании теоремы об n интервалах оптимальное управление включает в себя не более двух интервалов, на одном из которых U=Umax.
на основании теоремы об n интервалах оптимальное управление включает в себя не более двух интервалов, на одном из которых U=Umax. -
Уравнения объекта в соответствии с передаточной функцией имеют вид: -
-
Целью управления является перевод фазовых координат х1 и х2 в начало координат при заданных начальных условиях x10 -
-
Рисунок 4.3.1 – Фазовая плоскость -
-
Нетрудно доказать, что фазовые траектории для данного объекта и управления имеют вид парабол: -
-
При этом уравнение линии, состоящее из кусков парабол, ведущих в начало координат, имеет вид: (1 на рисунке 4.3.1) -
-
Эту линию называют линией переключения. -
Введем в рассмотрение функцию переключения U, определяемую уравнением . Очевидно, что оптимальное управление будет равно
. Очевидно, что оптимальное управление будет равно  , т.е.
, т.е.  .
. -
Таким образом, оптимальное управление реализуется с помощью идеального двухпозиционного реле, переключение которого происходит при смене знака функции v. -
Для построения оптимального регулятора, т.е. для реализации функции необходимо проконтролировать входную величину х1, ее производную х2, произвести операции возведения в квадрат, умножения, сложения. -
При этом управление будет оптимальным при любых начальных условиях. Упростить построение оптимального регулятора можно введением жестоких обратных связей по выходной координате х1 и ее производной х2. При этом имеем единичную линейную отрицательную обратную связь по х1 и нелинейную по х2 в соответствии с выражением , которая обеспечивает линию подключения 1 (рисунок 4.3.1). Структурная схема приведена на рисунке 4.3.2.
, которая обеспечивает линию подключения 1 (рисунок 4.3.1). Структурная схема приведена на рисунке 4.3.2. -
-
Рисунок 4.3.2 – Структурная схема регулятора -
-
Введение нелинейной обратной связи обеспечивает оптимальное управление для произвольных начальных условий. -
В ряде случаев начальные условия являются фиксированными. В этом случае нелинейную обратную связь F(x2) можно заменить линейной k , которую может перестраивать в зависимости от начальных условий x10. -
Рассмотрим процессы в системе, в которой нелинейная обратная связь заменена линейной. -
Допустим, что для некоторого значения x10 траектория является оптимальной 0Аx10. Кривая 1 является линией переключения. Замена нелинейной обратной связи линейной означает замену линии 1 прямой 2, наклон которой (т.е. значение k) выбирается так, чтобы она прошла через точку А. Момент переключения определяется теперь пересечением фазовой траектории с прямой 2, а уравнение функции переключения имеет вид .
. -
При переключение произойдет в точке
переключение произойдет в точке  т.е. после линии переключения 1, поэтому процесс будет неоптимальным с пере регулированием.
т.е. после линии переключения 1, поэтому процесс будет неоптимальным с пере регулированием. -
Если , то переключение будет в точке
, то переключение будет в точке , т.е. до линии 1, поэтому при движении к началу координат будут наблюдаться дополнительные переключения на прямой 2, так называемый скользящий режим начала координат по прямой 2.
, т.е. до линии 1, поэтому при движении к началу координат будут наблюдаться дополнительные переключения на прямой 2, так называемый скользящий режим начала координат по прямой 2. -
Следовательно, оптимальный процесс будет иметь место только при одном значении х10. При изменении начальных условий для получения оптимального процесса следует перестраивать коэффициент обратной связи k. -
Функцию, определяющую линию оптимальной системы, можно построить экспериментально. Для этого задаем ряд начальных условий х10 и подстройкой коэффициента k добиваемся оптимального процесса. Получившиеся при этом точки переключения на фазовой плоскости являются точками линии переключения. -
Порядок выполнения работы
-
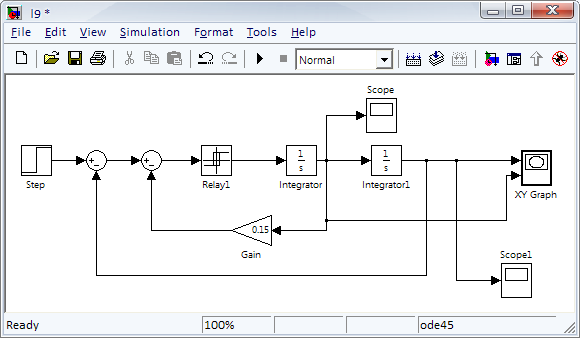
Собрать схему исследования, как показано на рисунке 6.3.3
-
-
Рисунок 4.3.3 – структурная схема исследования -
-
Собранная модель исследуемой системы на базе нелинейного и линейных блоков соответствует структурной схеме рисунке 6.3.2. При этом F(x2)=k. С помощью нелинейного блока сформировано двух полярное безынерционное реле.
-
Задать начальные условия -
Выбором k получить и зарисовать оптимальный процесс, скользящий режим и режим с перерегулированием на фазовой плоскости. -
Получить изрисовать указанные процессы х1(t) во временной области. Сравнить время переходных процессов. -
Задаваясь различными х10 и выбирая соответствующие для них значения k для оптимального процесса экспериментально оценить кривую переключения по 4-6 точкам переключения.
-
Список контрольных вопросов
-
Что такое скользящий режим? -
Каковы характерные особенности оптимальной по быстродействию системы управления линейными объектами? -
Что такое линия переключения? -
Какими способами можно реализовать оптимальное по быстродействию управление? -
Способы физической реализации линии переключения.
-
Содержание отчета
-
Структурная схема исследуемой системы. -
Результаты исследования влияния К на свойства системы. -
Результаты, расчеты экспериментальной линии переключения и сравнения ее с расчетной. -
Выводы.
-
- 1 ... 4 5 6 7 8 9 10 11 12
-
Лабораторная работа «Исследование системы экстремального управления».
-
-
Цель работы: Изучение характера и основных закономерностей процессов управления объектами с экстремальными характеристиками, ознакомление с принципом построения экстремального регулятора. -
Теоретическая часть
-
-
Под системой экстремального управления понимается система, в которой решение поставленной задачи осуществляется путем достижения экстремума некоторой функции и ее поддержания в условиях дрейфа. -
Отличительным признаком таких систем является наличие у объекта управления статической характеристики, с явно выраженным экстремумом, достигаемым при определенных значениях входных сигналов. Эта характеристика во времени не остается неизменной. Под действием различных причин может поменяться ее профиль, положение экстремума, экстремальное значение. Однако неизменным остается сам факт наличия экстремума. Система экстремального управления должна по мере изменения статических свойств объекта или ухода выходной величины объекта из зоны экстремума, изменять входные величины таким образом, чтобы они соответствовали экстремальной точке и обеспечивали работу объекта в экстремальном режиме. -
В основу синтеза одномерных экстремальных систем закладываются разнообразные методы. -
Для всех методов характерно то, что нарастание или убывание входного сигнала изменяется всякий раз, когда при поиске минимума выходной сигнал x(t) начинает возрастать и при поиске максимума убывать. Очевидно, что для организации такого характера изменения входного сигнала необходимо знание градиента производной функции . При этом реверс исполнительного механизма (ИМ), который вызывает изменение u(t) осуществляется каждый раз при изменении знака этой производной. Производную можно определить методом синхронного детектирования, который заключается в следующем.
. При этом реверс исполнительного механизма (ИМ), который вызывает изменение u(t) осуществляется каждый раз при изменении знака этой производной. Производную можно определить методом синхронного детектирования, который заключается в следующем. -
Пусть имеется функция x(u). Допустим, что ее аргумент получает малое приращение . В результате получим функции
. В результате получим функции  .Умножим эту функцию на приращение . Тогда получим величину
.Умножим эту функцию на приращение . Тогда получим величину  . Разложим Z в ряд Тейлора в окрестности точки u=u1 и воспользовавшись малостью ограничим разложение квадратичными членами:
. Разложим Z в ряд Тейлора в окрестности точки u=u1 и воспользовавшись малостью ограничим разложение квадратичными членами: -
 (*)
(*) -
Найдем среднее значение величины Z. С этой целью процесс Z можно подать на устройство (фильтр), выполняющее операцию усреднения -
 (**)
(**) -
где Т - время усреднения. -
Так как аргумент u является постоянным, то после подстановки (*) в (**), получим -

-
В качестве приращения , которое называется поисковым сигналом выберем гармонический процесс вида 
-
При этом .
. -
В результате имеем -
-
Т.е. среднее значение процесса Z пропорционально искомой производной. Схему принципа синхронного детектирования можно увидеть на рисунке 4.4.1 -

-
Рисунок 4.4.1 - Схема синхронного детектирования -
-
Если объект является многомерным, т.е. то искомые составляющие градиента этой функции
то искомые составляющие градиента этой функции  можно определить поставив на выходе объекта управления параллельно m синхронных детекторов СД.
можно определить поставив на выходе объекта управления параллельно m синхронных детекторов СД. -
Схему одномерной экстремальной системы, построенную по принципу синхронного детектирования можно представить в виде рисунка 4.4.2. -
-
-
-
Рисунок 4.4.2 – Одномерная экстремальная система -
-
В данном случае экстремальный регулятор реагирует на знак с помощью релейного элемента РЭ, выдающего сигнал на исполнительный механизм, обеспечивающий изменение u(t) с постоянной скоростью в сторону достижения экстремума x(u). -
Если РЭ отсутствует, то будем иметь классическую схему движения к экстремуму по методу градиента. В этом случае оказывается возможным убрать усредняющий фильтр Ф и возможность его функции на ИМ, который в силу своей природы реализует операцию интегрирования и вследствие этого выполняет функции фильтра высоких частот. -
Анализ изложенных принципов одномерного экстремального управления показывает, что в процессе работы выходной сигнал u(t) совершает периодические изменения от Umin до Umax относительно экстремального значения. При этом Тк - период колебаний. -
Качество работы экстремальной системы характеризуют тремя показателями: наибольшим отклонением входного сигнала от его экстремального значения, (амплитуда колебаний на выходе аm ) периодом колебаний входного сигнала и средним значением отклонения выходного сигнала объекта x(t) от его экстремального значения, называется потерями на рысканье (поиск) P. -
-
При инерционных объектах управления в их составе условно выделяют безынерционную часть с экстремальной (статической) характеристикой x(t) и линейное звено, отражающее инерционные свойства объекта рисунок 4.4.3 -
-

-
-
Рисунок 4.4.3 – линейное звено -
-
Процесс g(t) на входе нелинейного звена существенно отличается по форме от процесса u(t) в безынерционном случае. Процесс движения к экстремуму с инерционным объектом оказывается более сложным по сравнению с безынерционным. При этом деформации и временные запаздывания процессов могут привести к нарушению устойчивости поиска экстремума. -
В работе исследуются процессы, происходящие в экстремальной системе с безынерционным и инерционным объектом рисунок 4.4.4 (а, б). Имитация дрейфа осуществляется подачей сигнала g(t). -
а)
-
б)
-
-
Рисунок 4.4.4 – Экстремальные системы (а – безынерционная, б - инерционная) -
-
Порядок выполнения работы
-

