ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 28.04.2024
Просмотров: 69
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

СОДЕРЖАНИЕ
Лабораторная работа «Исследование устойчивости и качества линейных систем управления».
Лабораторная работа «Исследование влияние нулей и полюсов передаточной функции на свойства системы».
Лабораторная работа «Исследование дискретных линейных систем»
Лабораторная работа «Исследование адаптивной системы управления»
Лабораторная работа «Исследование оптимальных по быстродействию процессов»
Лабораторная работа «Исследование системы экстремального управления».
-
Комбинируя знаки обратных связей и значения коэффициентов k1,k2, получить шесть различных видов свободных движений, соответствующих следующим видам особых точек на фазовой плоскости: центр, устойчивый фокус, неустойчивый фокус, устойчивый узел, неустойчивый узел, седло. Для каждого вида получить фазовые траектории и графики х1(t). Свободные движения в системе возбуждаются ненулевыми начальными условиями x1(0), x2(0). Для того чтобы задать ненулевые начальные условия для блока Integrator, необходимо открыть свойства этого блока и в поле Initial condition при Initial condition source = internal задать соответствующее значение. -
Собрать структурную схему, как показано на рисунке 3.1.3
-
-
Рисунок 3.1.3 – Структурная схема нелинейной системы -
-
В системе MatLab она может выглядеть следующим образом
-
-
-
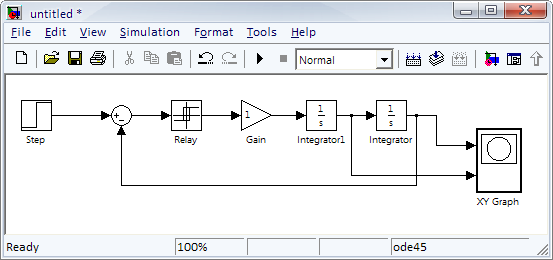
Рисунок 3.1.4 - Схема исследования в системе MatLab
-
Установить начальные условия х1(0)=2 -
Исследовать влияние К на характер процессов х1(t) и вид фазовых траекторий.
-
Список контрольных вопросов
-
-
Что такое фазовая траектория? -
Назовите основные виды фазовых портретов, как они выглядят? -
Для каждого фазового портрета укажите положение корней. -
Чем отличаются фазовые траектории линейных систем от фазовых траекторий нелинейных? -
Изобразите разновидности фазовых портретов нелинейных систем.
-
Содержание отчета
-
-
Структурные схемы исследуемых систем. -
Фазовые траектории и переходные процессы х1(t) для всех характерных случаев. -
Траектории корней линейной системы для различных видов фазовых траекторий. -
Выводы.
-
- 1 ... 4 5 6 7 8 9 10 11 12
Адаптивные системы
-
Лабораторная работа «Исследование комбинированных систем»
-
-
Цель работы: Исследование принципов построения комбинированных систем инвариантных к возмущающим и управляющим воздействиям. -
Теоретическая часть
-
Комбинированной называется система, в которой кроме принципа управления по отклонению применяется принцип управления по возмущению или управляющему воздействию. Это предполагает введению в систему дополнительных цепей, предназначенных для компенсации динамических ошибок, обусловленных возмущающими или управляющими воздействиями, и открывает дополнительные возможности повышения точности. -
Если ошибка от возмущения или управляющего воздействия при введении цепи компенсации обращается в нуль, то говорят, что система называется инвариантной по возмущению (или управляющему воздействию). -
Рассмотрим один из возможных путей осуществления инвариантности. Изображение ошибки в системе имеет вид: -
-
-
-
В последних выражениях Eg(p) и Ef(p) - изображения ошибок вызванных соответственно задающим и возмущающим воздействиями, Фg(p) и Фf(p) - передаточные функции системы по задающему и возмущающему воздействию, характеризующие инвариантную систему управления. -
Очевидно, что если то
то  и система инвариантна относительно возмущения f. Если
и система инвариантна относительно возмущения f. Если  , то
, то  и система инвариантна относительно задающего воздействия g. Для выполнения этих условий необходимо, чтобы полиномы в числителях передаточных функций обращались в нуль.
и система инвариантна относительно задающего воздействия g. Для выполнения этих условий необходимо, чтобы полиномы в числителях передаточных функций обращались в нуль. -
Таким образом, если , то , и если
, то , и если  , то .
, то . -
Для вычисления этих условий необходимо ввести дополнительные компенсирующие каналы передачи f или g. -
В качестве примера комбинированной системы рассмотрим структурную схему рисунок 4.1.1.
-
-
-
Рисунок 4.1.1 – Структурная схема комбинированной системы -
-
Компенсирующая цепь с передаточной функцией предназначена для измерения и компенсации возмущения f.
предназначена для измерения и компенсации возмущения f. -
Передаточная функция системы относительно f будет: -
-
Полная инвариантность относительно f достигается, если
-
Рассмотрим пример комбинированной следящей системы, инвариантной относительно задающего воздействия g рисунок 4.1.2. -
-
-
Рисунок 4.1.2 – Структурная схема следящей системы -
-
Передаточная функция системы относительно ошибки от задающего воздействия g будет:
-
Полная инвариантность выполняется при условии -

-
Полная инвариантность в обоих случаях обычно не выполняется из-за физической не реализуемости компенсирующих цепей Wk(p). Однако применение этих принципов позволяет достигнуть хорошей компенсации возмущающего или задающего воздействий. -
Порядок выполнения работы
-
-
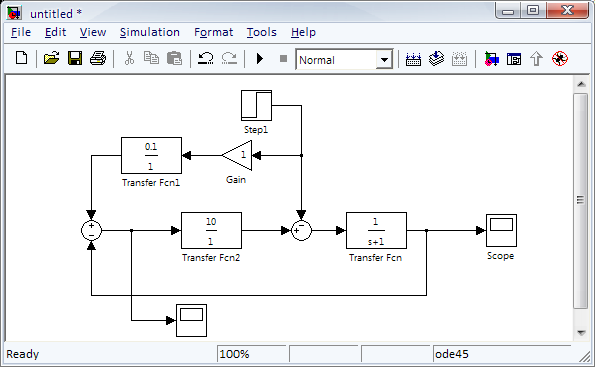
Собрать структурную схему, исследуемой системы как на рисунке 4.1.3
-
-
-
Рисунок 4.1.3 – Структурная схема исследования в MatLab
-
Получить и зарисовать x(t) при включенной и выключенной цепи компенсации Wк(p). -
Повторить п.п.2 при
-
.Повторить п.п. 2-3, приняв
-
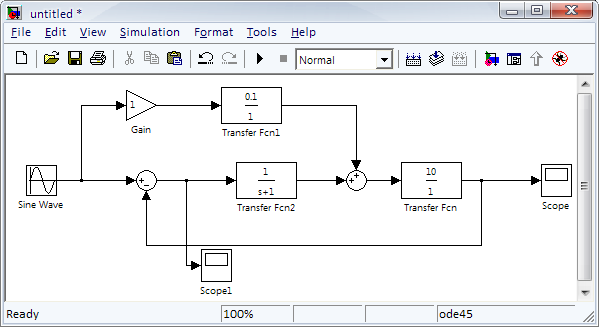
Собрать структурную схему, как показано на рисунке 4.1.4.
-
-
-
Рисунок 4.1.4 – Схема исследования в MatLab
-
Причем:
-
Получить и зарисовать ε(t) при включенной и выключенной цепи Wк(p). -
Повторить п.6, приняв
-
-
Контрольные вопросы
-
-
Что такое комбинированная система? -
Какие виды инвариантных систем существуют, в чем их суть? -
Каким образом введение дополнительного регулирования по задающему воздействию влияет на переходной процесс? -
В чем заключается условие полной инвариантности? -
Возможна ли полная инвариантность. Если да, то в каких системах, если нет-почему?
-
Содержание отчета
-
-
Отчет должен содержать экспериментальные графики переходных процессов с необходимыми пояснениями, а также теоретические расчеты x(t) и ε(t) для всех случаев и сравнение их с экспериментальными.
- 1 ... 4 5 6 7 8 9 10 11 12
Лабораторная работа «Исследование адаптивной системы управления»
-
-
Цель работы: Целью работы является изучение принципов построения адаптивных систем управления с эталонной моделью и исследование их динамических свойств. -
Теоретическая часть
-
-
Для нестационарных объектов, параметры которых в процессе работы могут меняться непредвиденным образом, применение обычных систем управления может не обеспечить требуемого качества управления, а иногда и устойчивости. В силу этого желательно создать такую систему, в которой организовано дополнительное получение информации об изменении динамических свойств в процессе работы и использование этой информации для надлежащего управления. -
Именно это и является отличительной чертой адаптивных систем. -
Адаптивные системы классифицируются в соответствии с различными принципами их построения. Одним из принципов является использование эталонной модели, которая реализует желаемые динамические характеристики основной системы и включается параллельно адаптивному контуру (рисунок 4.2.1)
-
-
-
Рисунок 4.2.1 – Адаптивная система с эталонной моделью
-
1- эталонная модель -
2- цепь настройки -
3- изменение параметров основного контура -
4- нестационарный объект управления -
-
Основной задачей синтеза системы является получение структуры цепи настройки, обеспечивающей выполнение задачи адаптации. -
В теории адаптивных систем можно выделить два основных метода решения задачи: -
-
Градиентный метод, базирующийся на основе теории чувствительности; -
Прямой метод Ляпунова, обеспечивающий априорно устойчивость процессов адаптации.
-
Рассмотрим градиентный метод на примере системы управления первого порядка (Рисунок 4.2.2)
-
-
Рисунок 4.2.2 – Система управления первого порядка -
-
Пусть для компенсации изменения a=a(t) коэффициент k сделан перестраиваемым. Передаточная функция замкнутой системы имеет вид: -
-
В качестве модели выберем звено с передаточной функцией -
-
где Xm - выходная координата модели -
a0, k0 - жесткие желаемые значения коэффициентов -
Мерой рассогласования движения системы и модели выберем функцию от ошибки в виде
в виде 
-
Величина I называется критерием качества, и зависит от входного воздействия g(t), начального рассогласования координат системы и модели, а также от изменяющегося а и перестраиваемого k. -
Сущность метода заключается в организации такого алгоритма перестройки k, чтобы в каждый момент времени его изменение было направлено на уменьшение I как функции k, т.е. в соответствии с выражением -
-
в свою очередь -
-
Величина может быть получена из следующих выражений
может быть получена из следующих выражений -
-
Величина называется функцией чувствительности координаты х по коэффициенту k
называется функцией чувствительности координаты х по коэффициенту k -
-
Из предыдущего уравнения видно, что величину можно получить как выход некоторого фильтра с передаточной функцией  при подаче на его вход входную величину системы и модели g.
при подаче на его вход входную величину системы и модели g. -
Для рассматриваемой системы имеем -
-
-
-
Передаточная функция Фф(р) упрощается, если фильтр работает не от входного, а от выходного сигнала х -
-
-
Строго говоря, параметры фильтра должны изменятся в соответствии с изменениями параметров системы а и k. Однако, в целях упрощения параметры фильтра можно сделать постоянными а0 и k0, соответствующим параметрам модели

