Файл: Методические указания по изучению разделов и тем курса Исполнительные механизмы систем управления.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 04.05.2024
Просмотров: 53
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

и максимальному угловому ускорению входной оси
 (3.20)
(3.20)

В этом случае требуемая мощность электродвигателя с некоторым запасом подсчитывается по формуле
 (3.21)
(3.21)
Оптимальное передаточное число редуктора и минимальный вращающий момент соответственно равны:
35
 (3.22)
(3.22)
 (3.23)
(3.23)
Выбор электродвигателя и передаточного числа редуктора производят в той же последовательности, что и в предыдущем случае. Далее выполняют расчет кинематики редуктора, т.е. определяют число пар зацеплений и и передаточное число каждой пары.
Из инженерной практики известно, что
Проверку на нагрев шаговых двигателей не производят, т.к. они рассчитаны на длительный режим отработки импульсов, следующих с частотой приемистости.
В простейших случаях преобразователи реализуются аппаратным способом на дискретных или интегральных элементах для каждого конкретного режима. На рисунке 5.7,а показана схема преобразователя, позволяющего реализовать закон нарастания частоты импульсов при разгоне, приведенный на рисунке 5.7,6. Преобразователь реализован на линиях задержки Л31-Л34, причем времена задержки а значение соответствует частоте приемистости. Генератор импульсов ГИ формирует импульсы заданной предельной частоты.
а значение соответствует частоте приемистости. Генератор импульсов ГИ формирует импульсы заданной предельной частоты.
В современных электроприводах с различными сочетаниями режимов работы на отдельных участках технологического процесса многорежимные аппаратные преобразователи получаются очень сложными. Поэтому все чаще задачу преобразователей выполняют микроконтроллеры с заложенными в них программами реализации требуемых режимов. В целом ряде случаев контроллеры берут на себя и часть функций распределителя импульсов.
5.4 Выбор шагового двигателя
Принцип действия и вытекающие из него особенности работы шаговых двигателей определяют и особенности выбора этих двигателей для систем автоматики. Особенно жесткие условия согласования двигателя и нагрузки предъявляются в разомкнутых системах автоматического привода, когда пропуск двигателем одного импульса приводит к ошибке в слежении, которую система исправить не в состоянии.
Выбор шагового двигателя проводят так же, как и выбор двигателей с непрерывным управлением методом последовательных приближений.
1. По известным из каталога шагу а и номинальной частоте приеми-
Iстости двигателя определяют необходимое передаточное отношение ре
дуктора

где - максимальная необходимая скорость вращения выходного вала.
- максимальная необходимая скорость вращения выходного вала.
Проверяют, обеспечит ли это передаточное отношение заданную точность отработки углов поворота выходного вала системы , т. е. удовлетворяется ли условие
2. Производят выбор типа редуктора, распределяют общее iредмежду
ступенями и оценивают КПД nред, а также момент инерции редуктора, при
веденный к валу двигателя
56
4 ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ НА БАЗЕ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА
Асинхронной машиной называется машина переменного тока, у которой угловая скорость ротора не равна угловой скорости магнитного поля статора. Угловая скорость ротора зависит от нагрузки, в режиме двигателя нагрузкой является механический момент сопротивления на валу машины.
Классификация основных типов асинхронных двигателей приведена на рисунке 4.1.
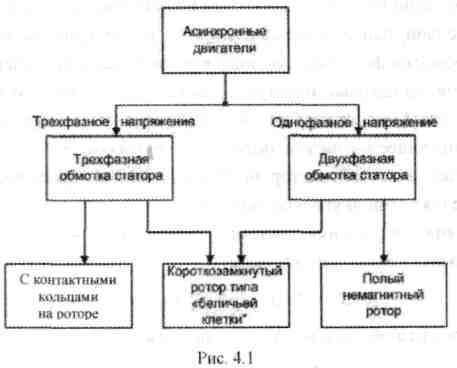
У асинхронных машин большой, средней и малой мощности на статоре практически всегда расположена трехфазная обмотка, т.е. обмотка, состоящая из трех отдельных электрических цепей, сдвинутых в пространстве на 120°, асинхронные микромашины выпускаются в основном с двухфазной обмоткой статора со сдвигом обмоток фаз на 90°.
4.1 Конструкция, принцип работы и характеристики трехфазного асинхронного двигателя
Конструкция. Магнитопроводы статора и ротора трехфазной машины обычно неявнополюсные (см. рисунок 1.5). Трехфазная обмотка статора обычно выполняется распределенной. На внешнюю панель выводов либо выходят все 6 выводов, либо обмотки фаз соединяются внутри машины пс
37
схеме «звезда» или «треугольник» и на панель выходят 3 вывода. Обмотка статора предназначена для создания вращающегося магнитного поля машины. Обмотка ротора типа «беличьей клетки» состоит из неизолированных алюминиевых или медных стержней, расположенных в пазах и замкнутых накоротко с торцов двумя кольцами.
Принцип действия. Принцип работы асинхронных машин связан с понятием вращающегося магнитного поля. Обмотка, создающая вращающееся поле, представляет собой N-фазную систему, т.е. состоит из N обмоток, которые сдвинуты друг относительно друга в пространстве и по которым протекают токи, сдвинутые во времени. Каждая из обмоток фаз созда
ет пульсирующий поток (неподвижный в пространстве и изменяющийся во времени), сдвинутый относительно других в пространстве и во времени. Если все обмотки фаз имеют одинаковое число витков и сдвинуты в пространстве на одинаковый пространственный угол у, токи имеют одинаковую амплитуду и частоту и сдвинуты во времени на одинаковый угол , то результирующее магнитное поле будет круговым. Это означает, что поток представляет собой вектор постоянной длины, вращающийся в пространстве с постоянной угловой скоростью.
Условия образования кругового магнитного поля в общем случае можно записать следующим образом:
 (4.1)
(4.1)
и в трехфазной машине они примут вид
они примут вид

Угловая скорость магнитного поля, называемая синхронной скоростью машины переменного тока, будет равна
\ (4.2)
(4.2)
где - число пар полюсов обмотки. Синхронная скорость вращения (об/мин)

Если изменить порядок чередования любых двух обмоток фаз, то вектор магнитного поля будет вращаться в противоположную сторону.
Асинхронная машина, как и электрические машины других типов, является обратимой. Принцип действия асинхронной машины основан на электромагнитном взаимодействии вращающегося магнитного поля статора с токами, наведенными этим полем в роторе. Поскольку наведение ЭДС
38

Реверсивные распределители при управлении однополярными импульсами имеют два входных канала: «Вперед» и «Назад». В первый канат командные импульсы поступают при повороте ротора вперед, во второй канал - при повороте назад.
Логику работы нереверсивного распределителя импульсов проанализируем на примере четырехтактной однополярной схемы управления четы-рехфазным ШД. На рисунке 5.6,а показана временная диаграмма однока-нальных командных импульсов периоды их следования обозначены
периоды их следования обозначены
римскими цифрами I, II, III и т.д. При поступлении каждого командного импульса РИ изменяет напряжения управления на входах усилите-
на входах усилите-
лей мощности УМ1-УМ4 таким образом, чтобы на обмотки управления ШД через УМ1-УМ4 поступали соответствующие силовые импульсы.

Распределители импульсов бывают аппаратные (исторически появились раньше) и программные. Аппаратные распределители обычно реализуются на базе дискретных полупроводниковых элементов или интегральных микросхем в виде сдвигающих регистров или счетчиков с дешифратором. На рисунке 5.6,6 показана схема распределителя импульсов, выполненного в виде сдвигающего регистра на двух -триггерах и позволяющего реализовать временную диаграмму импульсов, представленную на рисунке 5.6,а.
-триггерах и позволяющего реализовать временную диаграмму импульсов, представленную на рисунке 5.6,а.
Усилители мощности УМ, питающие обмотки управления ШД силовыми импульсами напряжения (тока), реализуются на транзисторах или запираемых тиристорах.
Преобразователь. Преобразователь служит для реализации требуемого закона управления приводом. Примерами таких характерных режимов являются следующие:
В этом случае требуемая мощность электродвигателя с некоторым запасом подсчитывается по формуле
Оптимальное передаточное число редуктора и минимальный вращающий момент соответственно равны:
35
Выбор электродвигателя и передаточного числа редуктора производят в той же последовательности, что и в предыдущем случае. Далее выполняют расчет кинематики редуктора, т.е. определяют число пар зацеплений и и передаточное число каждой пары.
Из инженерной практики известно, что
-
если ,то
,то ;
; -
если , то
, то ;
; -
если , то
, то ;
; -
если , то
, то
-
Определяют момент сопротивления, приведенный к валу двигателя: и по нему выбирают двигатель, номинальный момент которого близок к
и по нему выбирают двигатель, номинальный момент которого близок к
-
Не менее важным, чем момент сопротивления, является момент инерции нагрузки, приведенный к валу двигателя . Выбранный двигатель обеспечит работу без пропуска импульсов, если суммарный момент инерции нагрузки и редуктора, приведенный к валу двигателя, не превышает номинальной допустимой величины, указанной в каталоге.
. Выбранный двигатель обеспечит работу без пропуска импульсов, если суммарный момент инерции нагрузки и редуктора, приведенный к валу двигателя, не превышает номинальной допустимой величины, указанной в каталоге. -
Если суммарный момент превышает номинальный и момент сопротивления отличается от номинального значения, то следует проверить, не превысит ли частота подачи импульсов, необходимая для обеспечения максимальной скорости вращения, допустимую при этой нагрузке частоту по динамическим характеристикам двигателя.
превышает номинальный и момент сопротивления отличается от номинального значения, то следует проверить, не превысит ли частота подачи импульсов, необходимая для обеспечения максимальной скорости вращения, допустимую при этой нагрузке частоту по динамическим характеристикам двигателя.
Проверку на нагрев шаговых двигателей не производят, т.к. они рассчитаны на длительный режим отработки импульсов, следующих с частотой приемистости.
В простейших случаях преобразователи реализуются аппаратным способом на дискретных или интегральных элементах для каждого конкретного режима. На рисунке 5.7,а показана схема преобразователя, позволяющего реализовать закон нарастания частоты импульсов при разгоне, приведенный на рисунке 5.7,6. Преобразователь реализован на линиях задержки Л31-Л34, причем времена задержки
В современных электроприводах с различными сочетаниями режимов работы на отдельных участках технологического процесса многорежимные аппаратные преобразователи получаются очень сложными. Поэтому все чаще задачу преобразователей выполняют микроконтроллеры с заложенными в них программами реализации требуемых режимов. В целом ряде случаев контроллеры берут на себя и часть функций распределителя импульсов.
5.4 Выбор шагового двигателя
Принцип действия и вытекающие из него особенности работы шаговых двигателей определяют и особенности выбора этих двигателей для систем автоматики. Особенно жесткие условия согласования двигателя и нагрузки предъявляются в разомкнутых системах автоматического привода, когда пропуск двигателем одного импульса приводит к ошибке в слежении, которую система исправить не в состоянии.
Выбор шагового двигателя проводят так же, как и выбор двигателей с непрерывным управлением методом последовательных приближений.
1. По известным из каталога шагу а и номинальной частоте приеми-
Iстости двигателя определяют необходимое передаточное отношение ре
дуктора
где
Проверяют, обеспечит ли это передаточное отношение заданную точность отработки углов поворота выходного вала системы , т. е. удовлетворяется ли условие
2. Производят выбор типа редуктора, распределяют общее iредмежду
ступенями и оценивают КПД nред, а также момент инерции редуктора, при
веденный к валу двигателя
56
4 ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ НА БАЗЕ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА
Асинхронной машиной называется машина переменного тока, у которой угловая скорость ротора не равна угловой скорости магнитного поля статора. Угловая скорость ротора зависит от нагрузки, в режиме двигателя нагрузкой является механический момент сопротивления на валу машины.
Классификация основных типов асинхронных двигателей приведена на рисунке 4.1.
У асинхронных машин большой, средней и малой мощности на статоре практически всегда расположена трехфазная обмотка, т.е. обмотка, состоящая из трех отдельных электрических цепей, сдвинутых в пространстве на 120°, асинхронные микромашины выпускаются в основном с двухфазной обмоткой статора со сдвигом обмоток фаз на 90°.
4.1 Конструкция, принцип работы и характеристики трехфазного асинхронного двигателя
Конструкция. Магнитопроводы статора и ротора трехфазной машины обычно неявнополюсные (см. рисунок 1.5). Трехфазная обмотка статора обычно выполняется распределенной. На внешнюю панель выводов либо выходят все 6 выводов, либо обмотки фаз соединяются внутри машины пс
37
схеме «звезда» или «треугольник» и на панель выходят 3 вывода. Обмотка статора предназначена для создания вращающегося магнитного поля машины. Обмотка ротора типа «беличьей клетки» состоит из неизолированных алюминиевых или медных стержней, расположенных в пазах и замкнутых накоротко с торцов двумя кольцами.
Принцип действия. Принцип работы асинхронных машин связан с понятием вращающегося магнитного поля. Обмотка, создающая вращающееся поле, представляет собой N-фазную систему, т.е. состоит из N обмоток, которые сдвинуты друг относительно друга в пространстве и по которым протекают токи, сдвинутые во времени. Каждая из обмоток фаз созда
ет пульсирующий поток (неподвижный в пространстве и изменяющийся во времени), сдвинутый относительно других в пространстве и во времени. Если все обмотки фаз имеют одинаковое число витков и сдвинуты в пространстве на одинаковый пространственный угол у, токи имеют одинаковую амплитуду и частоту и сдвинуты во времени на одинаковый угол , то результирующее магнитное поле будет круговым. Это означает, что поток представляет собой вектор постоянной длины, вращающийся в пространстве с постоянной угловой скоростью.
Условия образования кругового магнитного поля в общем случае можно записать следующим образом:
и в трехфазной машине
Угловая скорость магнитного поля, называемая синхронной скоростью машины переменного тока, будет равна
\
где - число пар полюсов обмотки. Синхронная скорость вращения (об/мин)
Если изменить порядок чередования любых двух обмоток фаз, то вектор магнитного поля будет вращаться в противоположную сторону.
Асинхронная машина, как и электрические машины других типов, является обратимой. Принцип действия асинхронной машины основан на электромагнитном взаимодействии вращающегося магнитного поля статора с токами, наведенными этим полем в роторе. Поскольку наведение ЭДС
38
-

55
искусственное дробление (уменьшение) шага, достигаемое за счет ступенчатой модуляции тока в обмотках управления ШД в пределах основного шага; -
программный разгон и торможение, обеспечивающие работу привода в переходных режимах без потери шагов; достигается за счет изменения частоты управляющих импульсов по требуемым законам; -
старт-стопный режим, обеспечивающий минимальную динамическую ошибку в процессе отработки шага; достигается за счет перевода привода в режим торможения противовключением на отдельных отрезках времени отработки шага (одного, двух, трех).
Реверсивные распределители при управлении однополярными импульсами имеют два входных канала: «Вперед» и «Назад». В первый канат командные импульсы поступают при повороте ротора вперед, во второй канал - при повороте назад.
Логику работы нереверсивного распределителя импульсов проанализируем на примере четырехтактной однополярной схемы управления четы-рехфазным ШД. На рисунке 5.6,а показана временная диаграмма однока-нальных командных импульсов
римскими цифрами I, II, III и т.д. При поступлении каждого командного импульса РИ изменяет напряжения управления
лей мощности УМ1-УМ4 таким образом, чтобы на обмотки управления ШД через УМ1-УМ4 поступали соответствующие силовые импульсы.
Распределители импульсов бывают аппаратные (исторически появились раньше) и программные. Аппаратные распределители обычно реализуются на базе дискретных полупроводниковых элементов или интегральных микросхем в виде сдвигающих регистров или счетчиков с дешифратором. На рисунке 5.6,6 показана схема распределителя импульсов, выполненного в виде сдвигающего регистра на двух
Усилители мощности УМ, питающие обмотки управления ШД силовыми импульсами напряжения (тока), реализуются на транзисторах или запираемых тиристорах.
Преобразователь. Преобразователь служит для реализации требуемого закона управления приводом. Примерами таких характерных режимов являются следующие:

