Файл: Курсовая работа по дисциплине радиоавтоматика москва 2022 Цель работы Вариант 11, группа 5.docx
Добавлен: 04.05.2024
Просмотров: 68
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
МИНИСТЕРСТВО ЦИФРОВОГО РАЗВИТИЯ, СВЯЗИ И МАССОВЫХ КОММУНИКАЦИЙ РОССИЙСКОЙ ФЕДЕРАЦИИ
Ордена Трудового Красного Знамени
федеральное государственное бюджетное образовательное учреждение
высшего образования
«Московский технический университет связи и информатики»
________________________________________________________________________
Кафедра радиотехнических систем
Курсовая работа
по дисциплине
РАДИОАВТОМАТИКА
Выполнила:
Москва 2022
Цель работы

Вариант 11, группа 5
Исходные данные:
| Вид САР | W(S) неизменяемой части САР | Кд | Кн | Рт-61 постоянные времени | Хвх(t) | (Хош)уст от Хвх(t) | Ту | Хмв1 | Хмв2 | Sш(  )=S0 )=S0 | |
| | | В/град | 1/с | Тy3 | Тан | град/  | град | с | В | град | |
| АСН |  | 0,8 | 20 | 0 | 0,7 | 12 | 0,4 | 0,5 | 0,06 | 6 | 0,006 |
-
Принцип работы системы АСН, ее назначение и особенности.
(АСН) - системы автоматического сопровождения по направлению движущихся объектов. Система АСН осуществляет автоматическое измерение угловых координат движущегося объекта и одновременно пространственную селекцию этого объекта по угловым координатам.
Принцип работы:
Положение движущегося объекта в какой-либо системе координат определяется расстоянием от начала координат до этого объекта и направлением из начала координат на этот объект (рис. 1). Направление на объект определяется двумя угловыми координатами: азимутом и углом места.
Азимутом объекта называют угол а в горизонтальной (азимутальной) плоскости между прямой соединяющей начало координат с проекцией объекта на эту плоскость, и координатной осью
Углом места объекта называют угол в вертикальной (угломестной) плоскости между прямой соединяющей начало координат с проекцией объекта на плоскость и прямой, проходящей через начало координат и объекта.
Измерение угловых координат движущихся объектов осуществляется системой АСН. Система АСН (рис. 2) — это система радиоавтоматики, состоящая из приемопередающего устройства ППУ, антенны направленного действия А и двухканального следящего привода СП этой антенны, посредством которого осуществляется поворот антенны в двух плоскостях — азимутальной (горизонтальной) и угломестной (вертикальной).
Рис. 1
Рис. 2 Система АСН
2. Описание отдельных элементов системы АСД.
Таким образом, система АСН состоит из двух следящих систем, в каждой из которых входной величиной является соответствующая угловая координата (азимут или угол места) движущегося объекта, а выходной величиной — угол, определяющий положение равносигнального направления РСН в азимутальной или угломестной плоскости. Обычно такие радиотехнические системы работают в импульсном режиме, т. е. излучают в пространство короткие (длительностью 9 с и менее) радиоимпульсы с частотой повторений При этом антенна работает и на прием и на передачу: посредством антенного переключателя она подключается поочередно то к передатчику, та к приемнику.
Рис. 3 Функциональная схема одной из следящих систем, образующих систему АСН

На рис. 3 приведена функциональная схема одной из следящих систем, образующих систему АСН, состоящая из измерителя рассогласования, или углового дискриминатора УД , усилительного устройства У и исполнительного двигателя ИД с редуктором Р. Объектом управления ОУ является следящая антенна А системы АСН. Кроме того, для получения требуемых динамических характеристик следящей системы в ее состав введено корректирующее устройство КУ. Оно состоит из тахометрического моста, вырабатывающего напряжение, пропорциональное скорости вращения ротора исполнительного двигателя, и дифференцирующей цепи и представляет собой цепь гибкой обратной связи, или связи по ускорению, охватывающей усилитель и исполнительный двигатель следящей системы.
Возникающее в результате движения объекта рассогласование преобразуется угловым дискриминатором в напряжение ошибки которое поступает на вход усилителя следящей системы. Выходное напряжение усилителя подводится к цепи управления исполнительного двигателя. Под действием этого напряжения ротор двигателя начинает вращаться с угловой скоростью и через редуктор поворачивает антенну в соответствующей плоскости в сторону уменьшения рассогласования.
Для обеспечения поворота антенны в двух плоскостях выходные оси двигателей азимутальной и угломестной следящих систем соединены с антенной посредством карданного подвеса. Если с неподвижным основанием антенны совместить систему координат, то угловое положение антенны относительно этого основания определит азимут объекта в горизонтальной плоскости и угол места объекта — в вертикальной.
2. Описание отдельных элементов системы АСД.
Заметим, что исполнительный двигатель с редуктором совместно со следящей антенной представляют собой неизменяемую часть системы АСН с заданными динамическими характеристиками. Эти характеристики должны быть учтены при разработке управляющего устройства — усилителя с корректирующими цепями — для получения требуемых динамических характеристик всей системы. Поэтому в качестве объекта управления системы АСН целесообразно рассматривать не одну антенну, а антенну и исполнительный двигатель с редуктором как единое целое (в динамическом отношении). При этом динамические свойства антенны, характеризуемые ее
моментом инерции относительно выходной оси следящей системы учитывают при расчете постоянной времени исполнительного двигателя.
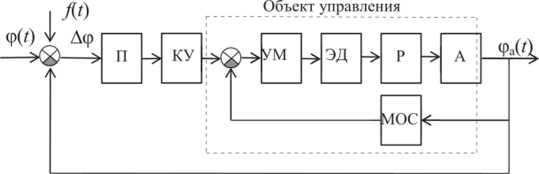
Рис. 4.Структурно-функциональная схема системы АСН
Напряжение с пеленгатора (П) через корректирующее устройство (КУ) подается на усилитель мощности (УМ), на который подступает и сигнал с местной обратной связи (МОС). Усилитель мощности вводится для обеспечения нормальной работы электрического двигателя (ЭД), который через редуктор (Р) поворачивает антенну (А) в направлении уменьшения сигнала рассогласования Дф, не превышающего в режиме сопровождения цели допустимого значения.
Цепочка элементов УМ, ЭД, Р и А, охваченных местной обратной связью, представляет в системе объект управления.
Система работает в условиях действия ряда возмущающих воздействий (помех), основными из которых являются следующие:
-
флуктуация отраженного от цели радиолокационного сигнала; -
угловой шум, обусловленный перемещением по цели центра отражения сигнала (блуждание блестящей точки); -
шум первых каскадов приемника.
Рис. 5. Антенна углового дискриминатора системы АСН
Антенна углового дискриминатора системы АСН с одновременным сравнением сигналов состоит из отражателя и четырех излучателей, расположенных симметрично относительно геометрической оси отражателя и формирующих четыре пространственных диаграммы направленности, как показано на рис. 5
Линия пересечения этих диаграмм, совпадающая с геометрической осью отражателя, является равносигнальным направлением антенны.
Если пересечь пространственную диаграмму направленности вертикальной плоскостью, проходящей через равносигнальную ось ОО’ то в плоскости сечения получим плоскую, угломестную диаграмму направленности, состоящую из двух лепестков.
3. Расчет динамических звеньев
I порядка системы АСН.
Рассчитываем и строим ЛАЧХ, ЛФЧХ, АФЧХ, переходную характеристику h(t) и реакцию l(t)на линейно меняющееся воздействие
Разбиваем передаточную функцию неизменяемой части системы на типовые динамические звенья первого порядка.
W1(S) =
 – интегрирующее звено
– интегрирующее звеноW2(S) =
 – второго звена нет
– второго звена нетW3(S) =
 – инерционное звено
– инерционное звеноРассчитываем и строим ЛАЧХ, ЛФЧХ, АФЧХ, переходную характеристику h(t) и реакцию l(t)на линейно меняющееся воздействие.


 :
: , следовательно
, следовательно
Λ(w) =
ЛФЧХ:
G(w)=-arctg(0.1w)
| w | 0.1 | 1 | 10 | 100 |
| U(w) | 0.999 | 0.990 | 0.5 | 0.099 |
| V(w) | -0.0099 | -0.097 | 0.5 | 0.099 |
| Λ(w) | -0.0004 | -0.096 | -3.0108 | -20.043 |
| G(w) | -0.0099 | -0.099 | -0.785 | -1.471 |
АФЧХ: