Файл: Курсовая работа по дисциплине радиоавтоматика москва 2022 Цель работы Вариант 11, группа 5.docx
Добавлен: 04.05.2024
Просмотров: 73
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
Приведенная непрерывная часть системы будет иметь следующую передаточную функцию:
Представим в виде суммы элементарных дробей
в виде суммы элементарных дробей

Составим систему уравнений, чтобы определить коэффициенты A, B, C, D, F:

 ;
;  ;
;  ; D=0,01104;
; D=0,01104;
Воспользовавшись таблицей преобразования W находим для преобразование:

Найдём для 2-х значений передаточные функции с W преобразованием.
передаточные функции с W преобразованием.
где
Используя математический пакет Mathcad, найдем корни в числителе.

 ;
;  ;
;  ;
;  23;
23;
Построим графики ЛАЧХ и ЛФЧХ.
 1
1

 033
033

Далее произведем Z преобразование.
Воспользовавшись таблицей преобразования Z находим для (64) преобразование:

Раскроем скобки и подставим значения .
При и запишем передаточную функцию.



Тогда:

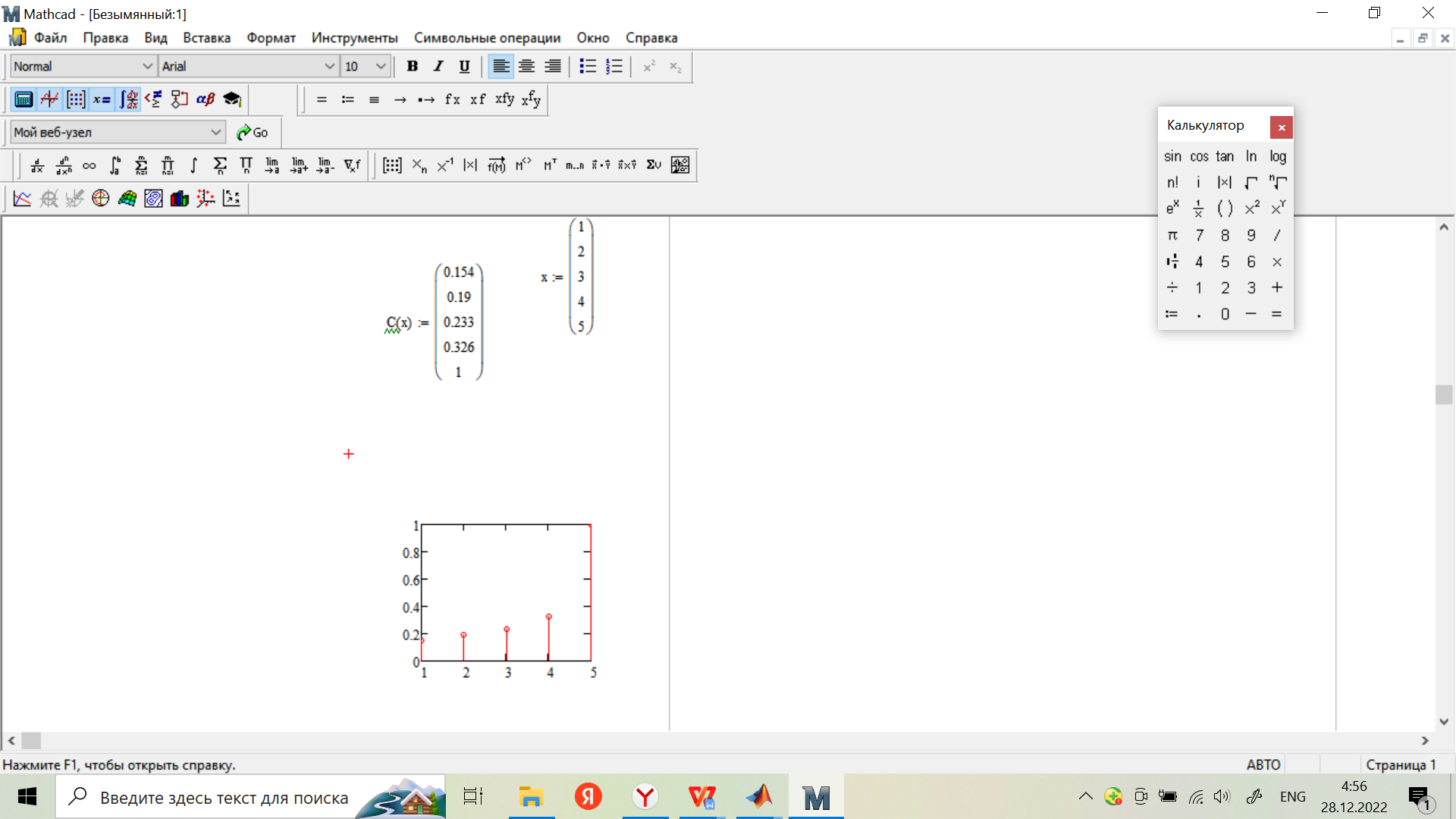
Рассчитаем переходный процесс и построим импульсную характеристику.
Поделив числитель на знаменатель для каждой передаточной функции, получим коэффициенты C.
При

12. Собрать на лабораторной установке дискретную систему и:
а) снять переходную характеристику h(t);
б) определить реакцию l(t);
в) изучить ЛАЧХ, ЛФЧХ, АФЧХ системы.
Незамкнутые системы

Рисунок 60 - Дискретная система с единичным скачком

Рисунок 61 - Переходная характеристика дискретной системы
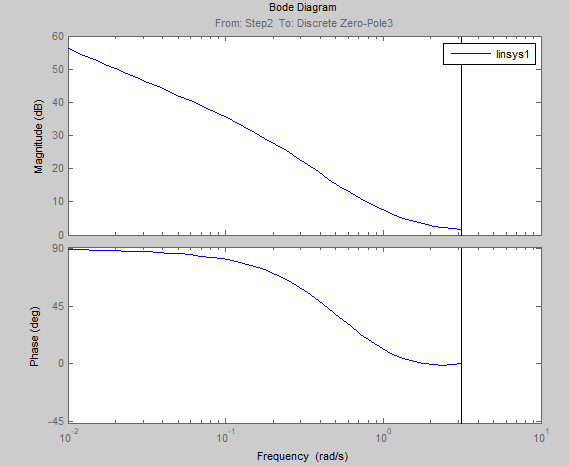
Рисунок 62 – АЧХ и ФЧХ
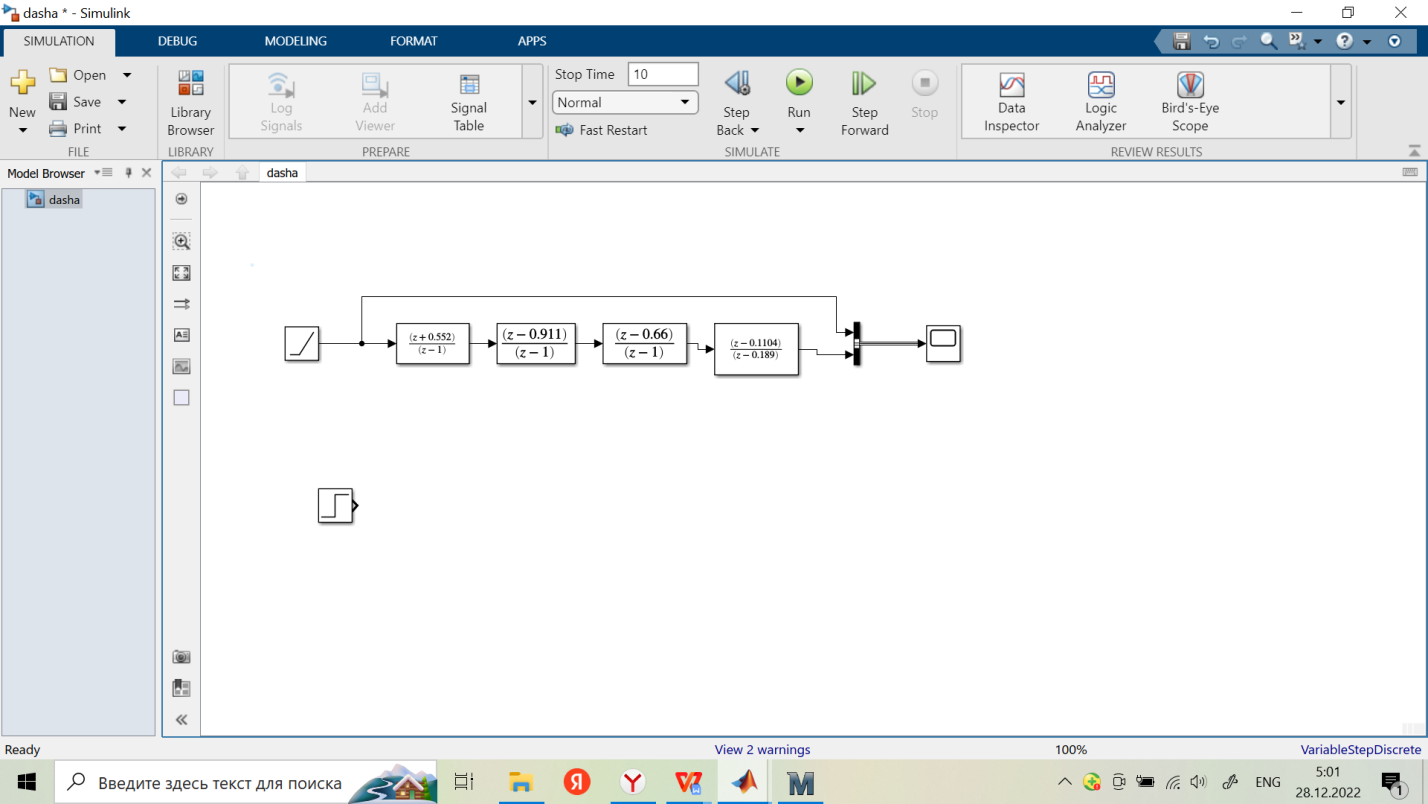
Рисунок 63 - Дискретная система с линейно меняющемся воздействием
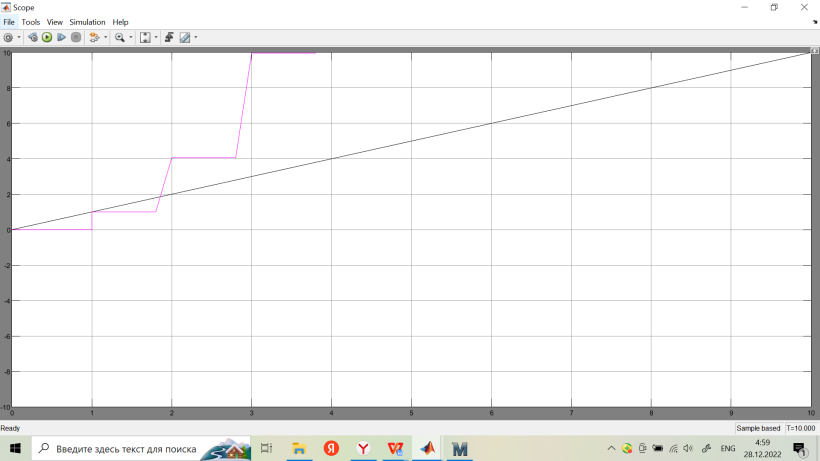
Рисунок 64 - Реакция на линейно меняющееся воздействие дискретной системы
Замкнутые системы
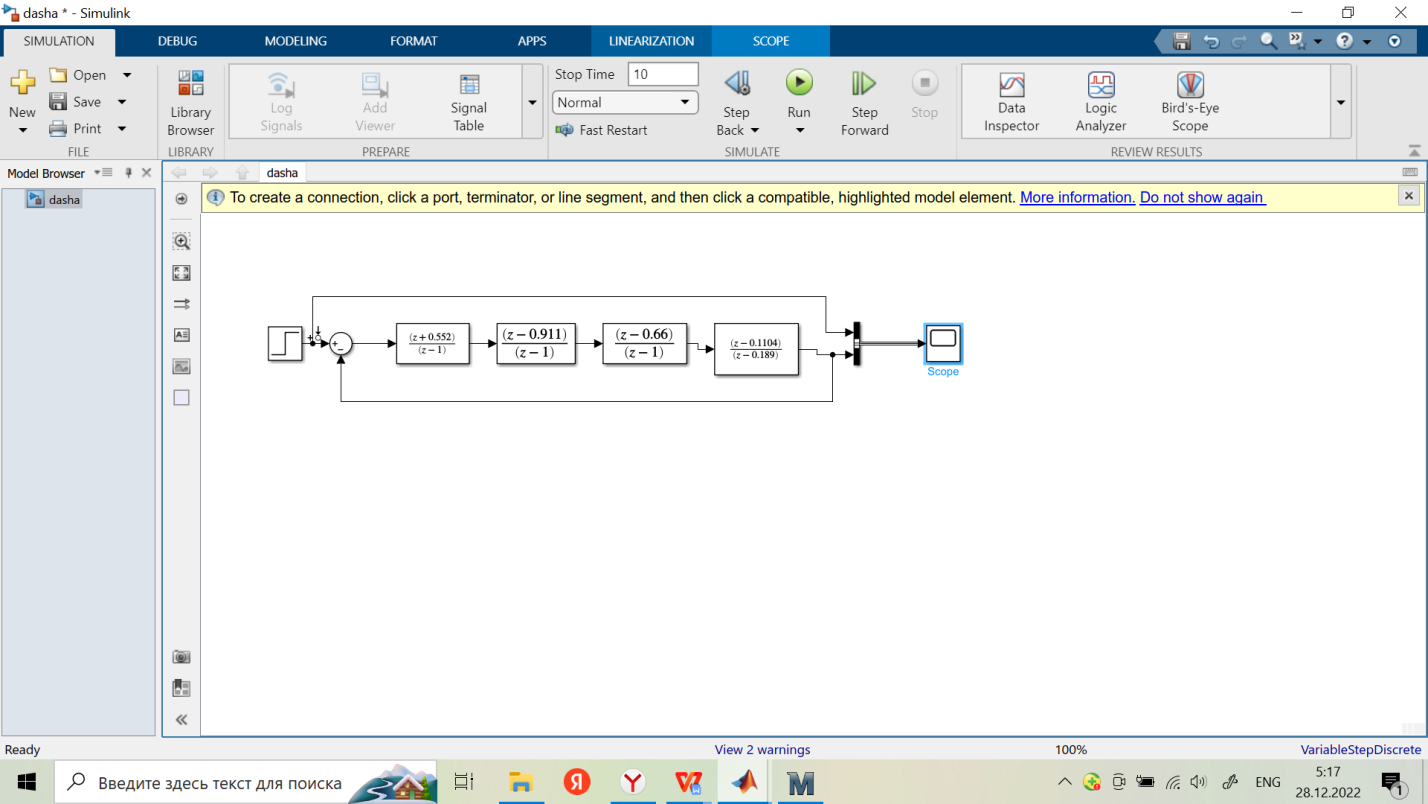
Рисунок 65 - Дискретная система с единичным скачком
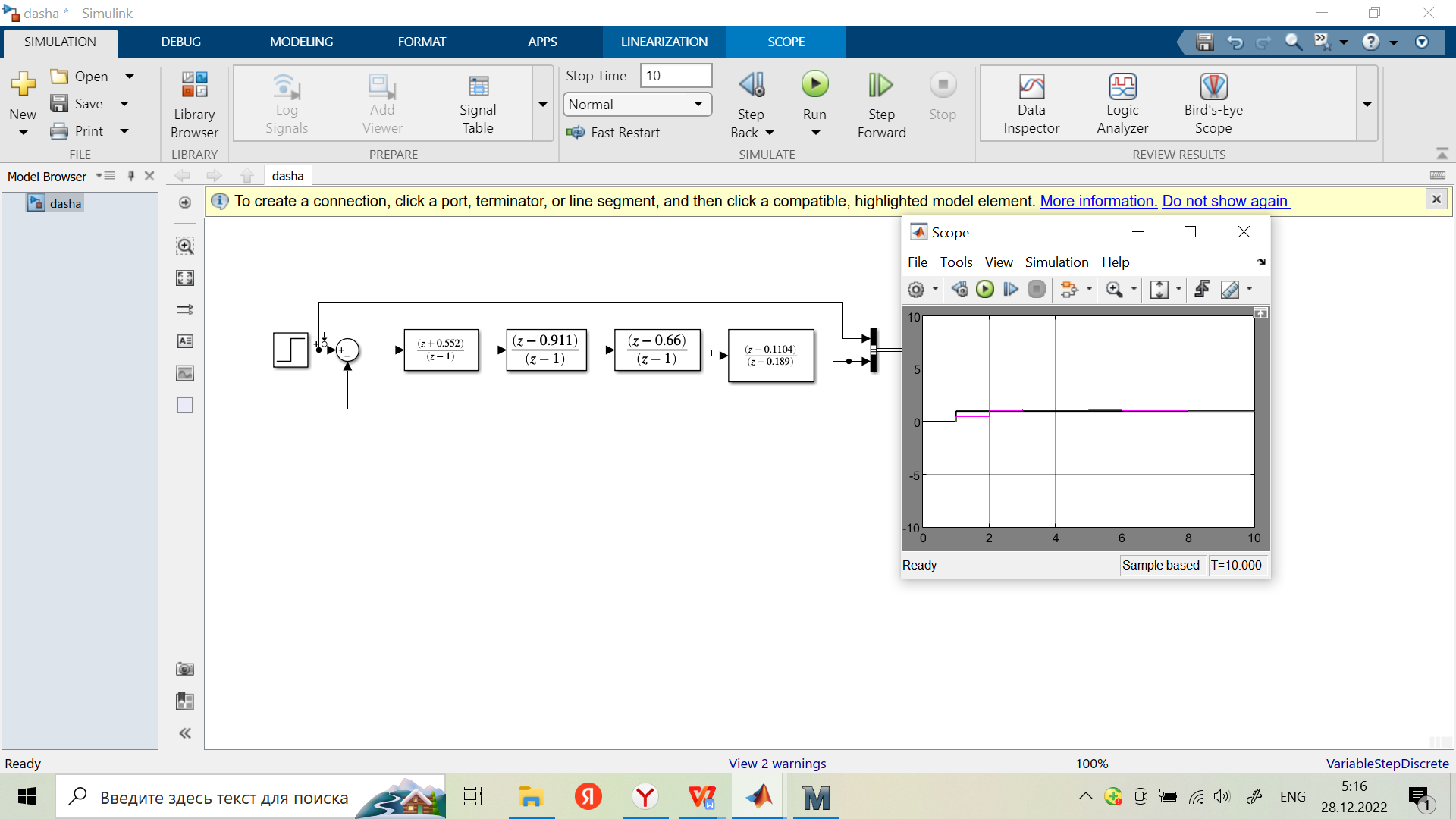
Рисунок 66 - Переходная характеристика дискретной системы
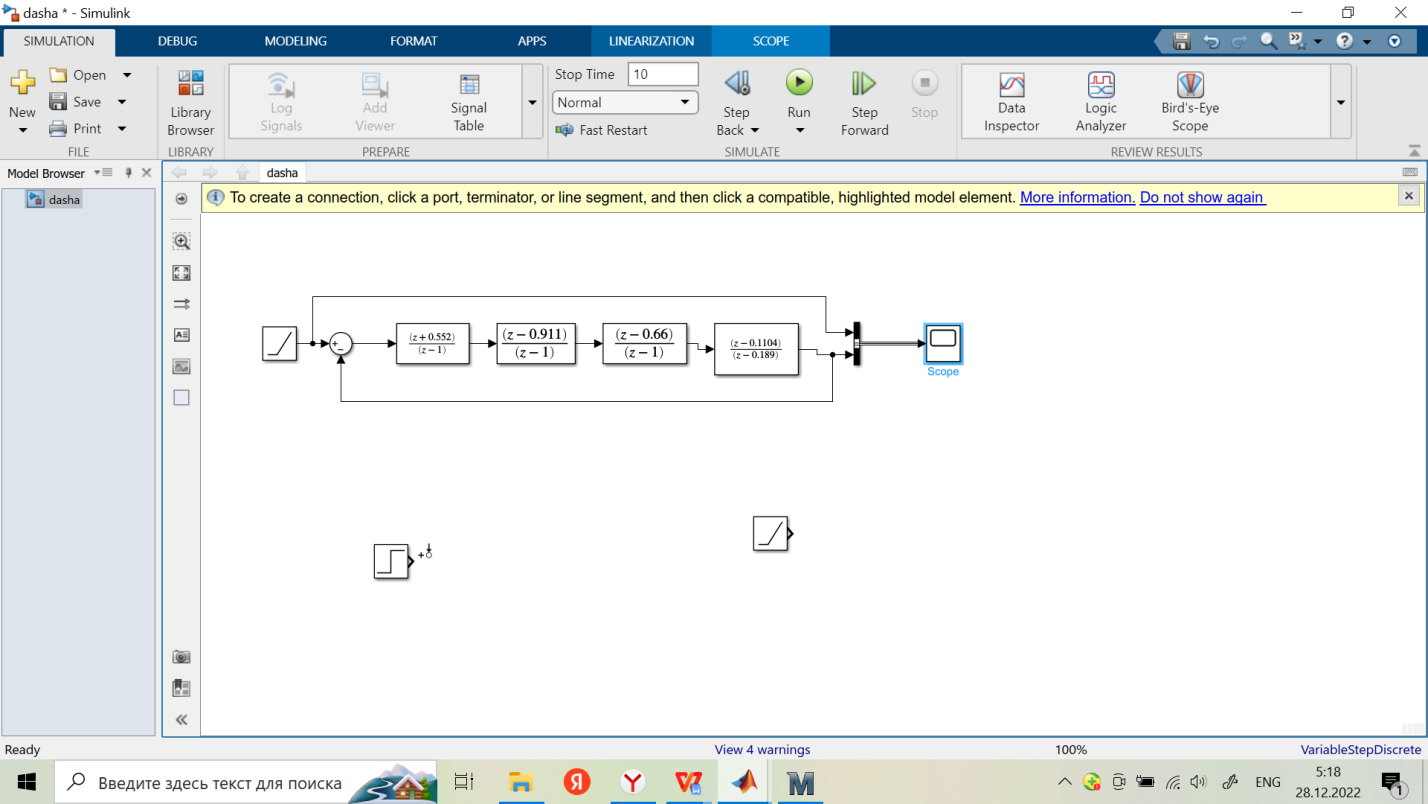
Рисунок 67 - Дискретная система с линейно меняющемся воздействием


Рисунок 68 - Реакция на линейно меняющееся воздействие дискретной системы
Вывод:
На первом этапе я ознакомилась с назначением и особенностями проектируемой радиоавтоматической системы и исследовала ее динамические свойства при заданных исходных параметрах ее элементов и установила, что исходная система отвечает предъявляемым к ней техническим требованиям. Позже я осуществила коррекцию исходной системы путем включения в систему динамических звеньев коррекции, а также исследовала влияние на работоспособность и динамические свойства скорректированной системы имеющихся в ее составе нелинейных звеньев.
Список литературы:
Представим
в виде суммы элементарных дробей Составим систему уравнений, чтобы определить коэффициенты A, B, C, D, F:
; ; ; D=0,01104; Воспользовавшись таблицей преобразования W находим для
преобразование: Найдём для 2-х значений
передаточные функции с W преобразованием.где
Используя математический пакет Mathcad, найдем корни в числителе.
; ; ; 23;Построим графики ЛАЧХ и ЛФЧХ.
1 033 Далее произведем Z преобразование.
Воспользовавшись таблицей преобразования Z находим для
(64) преобразование: Раскроем скобки и подставим значения
.При
и запишем передаточную функцию. Тогда:
Рассчитаем переходный процесс и построим импульсную характеристику.
Поделив числитель на знаменатель для каждой передаточной функции, получим коэффициенты C.
При
12. Собрать на лабораторной установке дискретную систему и:
а) снять переходную характеристику h(t);
б) определить реакцию l(t);
в) изучить ЛАЧХ, ЛФЧХ, АФЧХ системы.
Незамкнутые системы
Рисунок 60 - Дискретная система с единичным скачком
Рисунок 61 - Переходная характеристика дискретной системы
Рисунок 62 – АЧХ и ФЧХ
Рисунок 63 - Дискретная система с линейно меняющемся воздействием
Рисунок 64 - Реакция на линейно меняющееся воздействие дискретной системы
Замкнутые системы
Рисунок 65 - Дискретная система с единичным скачком
Рисунок 66 - Переходная характеристика дискретной системы
Рисунок 67 - Дискретная система с линейно меняющемся воздействием
Рисунок 68 - Реакция на линейно меняющееся воздействие дискретной системы
Вывод:
На первом этапе я ознакомилась с назначением и особенностями проектируемой радиоавтоматической системы и исследовала ее динамические свойства при заданных исходных параметрах ее элементов и установила, что исходная система отвечает предъявляемым к ней техническим требованиям. Позже я осуществила коррекцию исходной системы путем включения в систему динамических звеньев коррекции, а также исследовала влияние на работоспособность и динамические свойства скорректированной системы имеющихся в ее составе нелинейных звеньев.
Список литературы:
-
Минаева О.Н., Горячева Л.Я. «Методические указания по дисциплине Радиоавтоматика с использованием программного обеспечентя Matlab с расширением Simulink.» -
Иодко Е.К. «Основы автоматики и телемеханики» М. – Связь 1986 г. -
Конспект лекций -
Методические указания по нелинейным и импульсным системам.