Файл: Курсовая работа по дисциплине радиоавтоматика москва 2022 Цель работы Вариант 11, группа 5.docx
Добавлен: 04.05.2024
Просмотров: 72
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
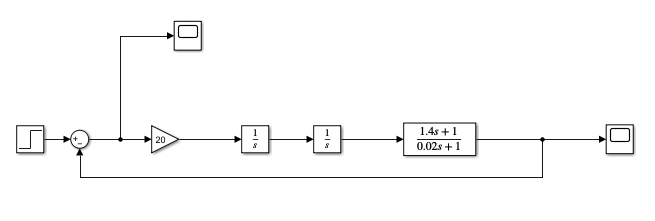
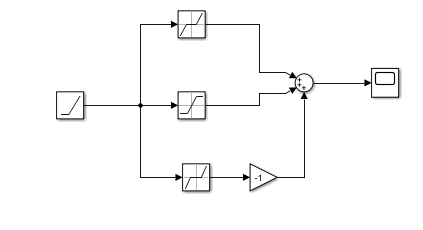
Инерционное звено с ООС
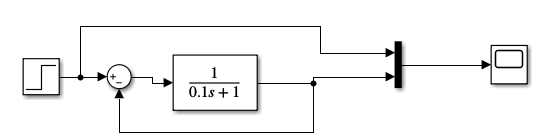
Рисунок 18 – Модель инерционного звена с ООС для переходной характеристики
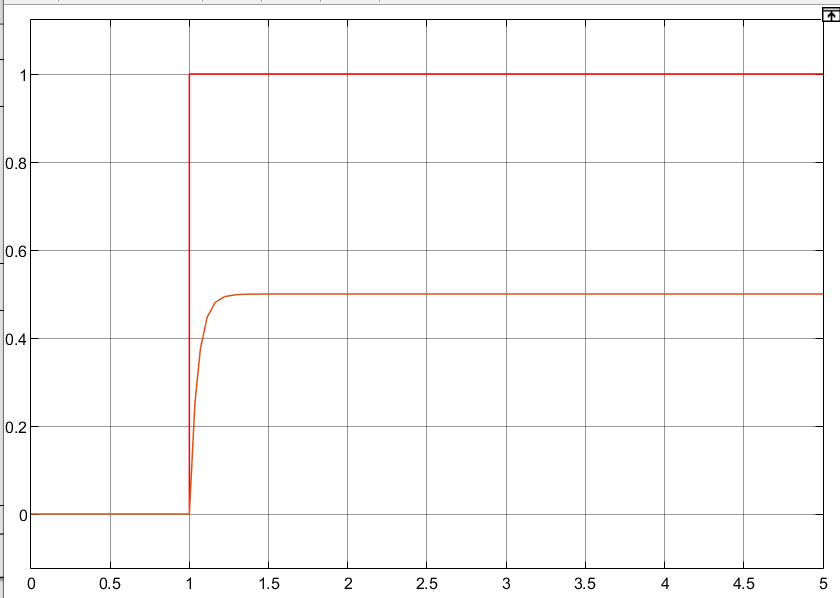
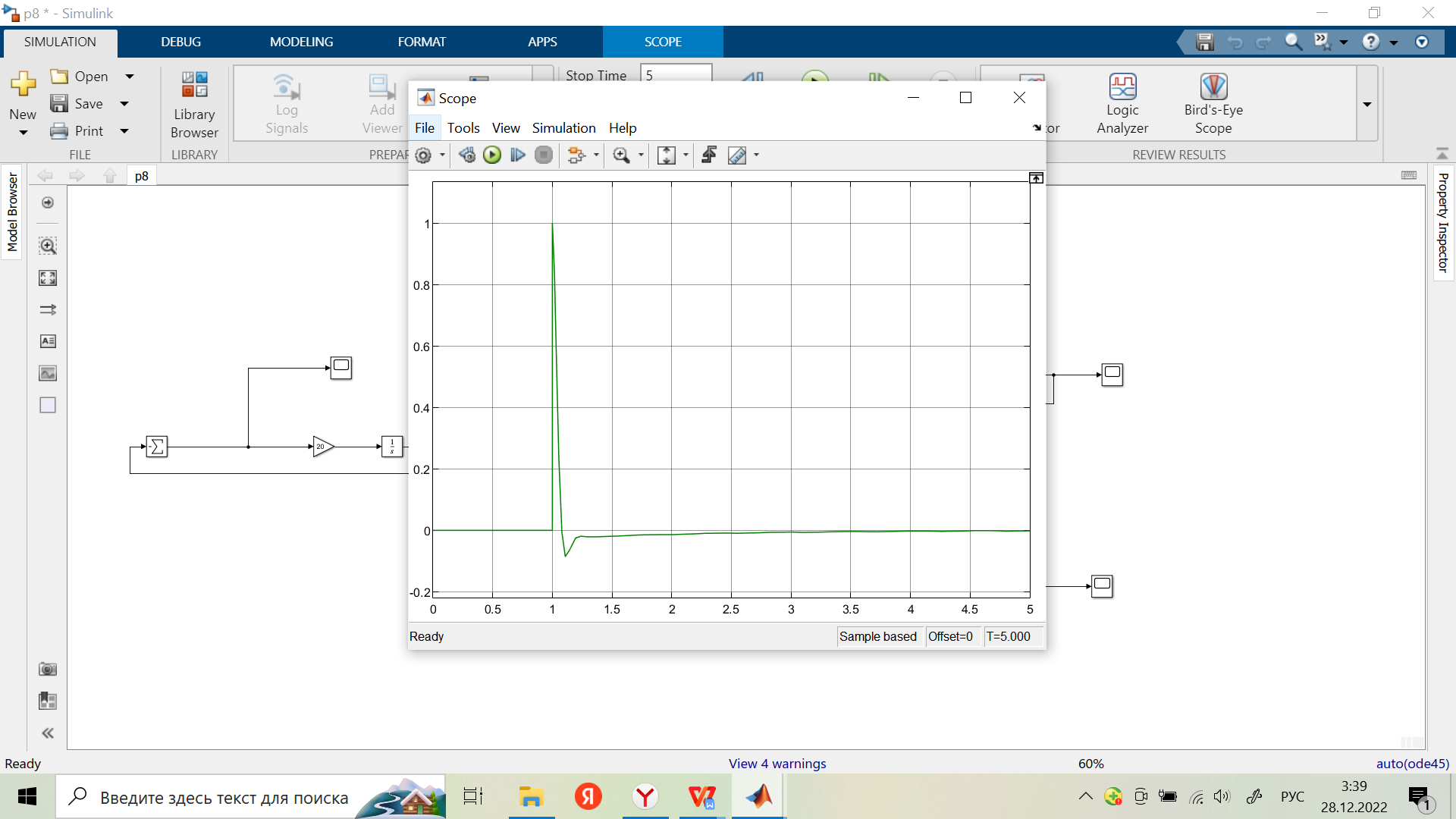
Рисунок 19 – Переходная характеристика h(t)
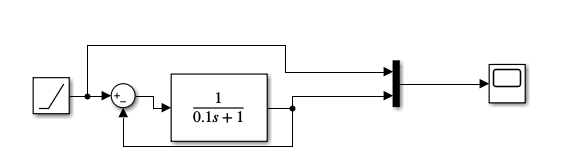
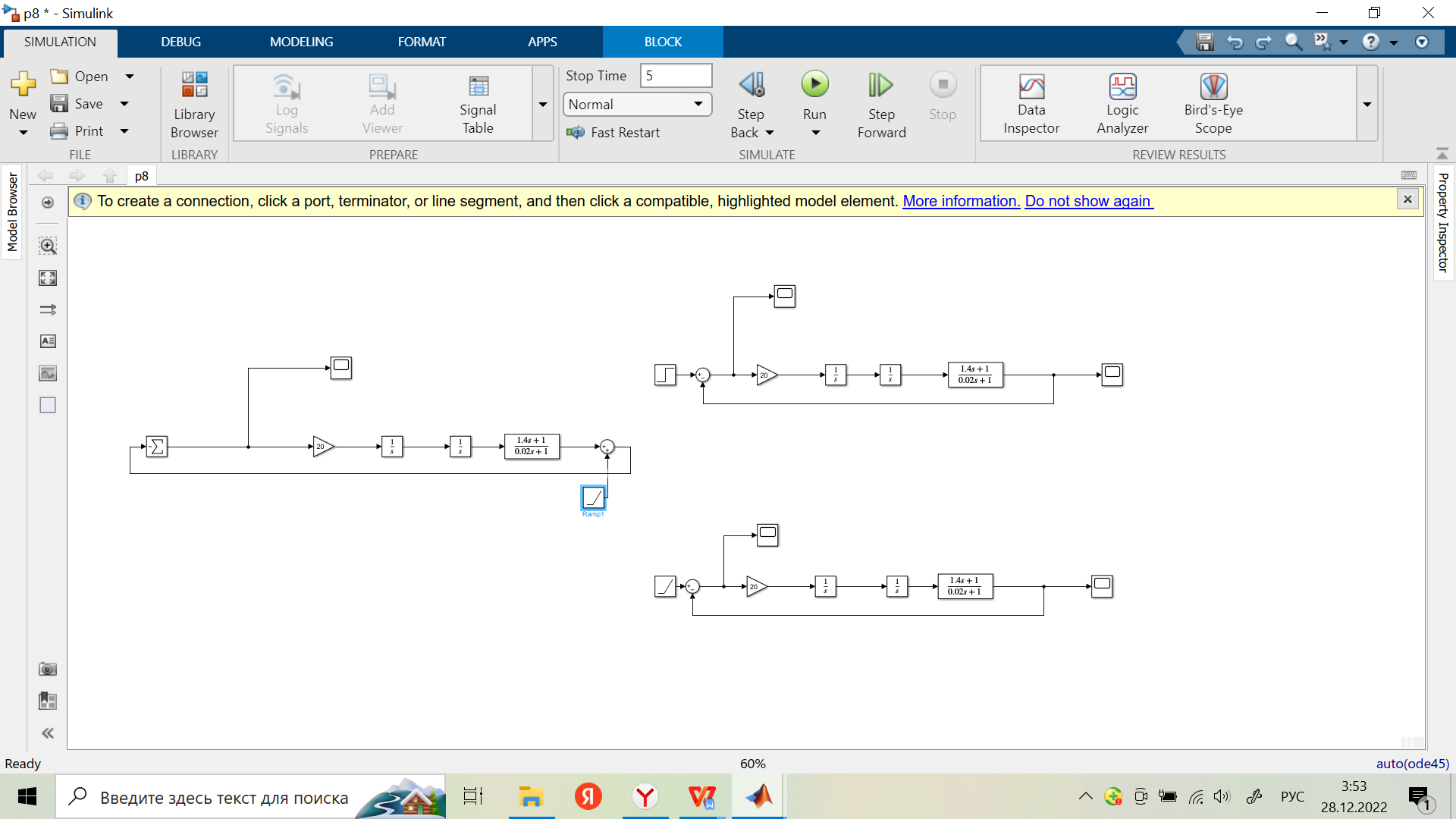
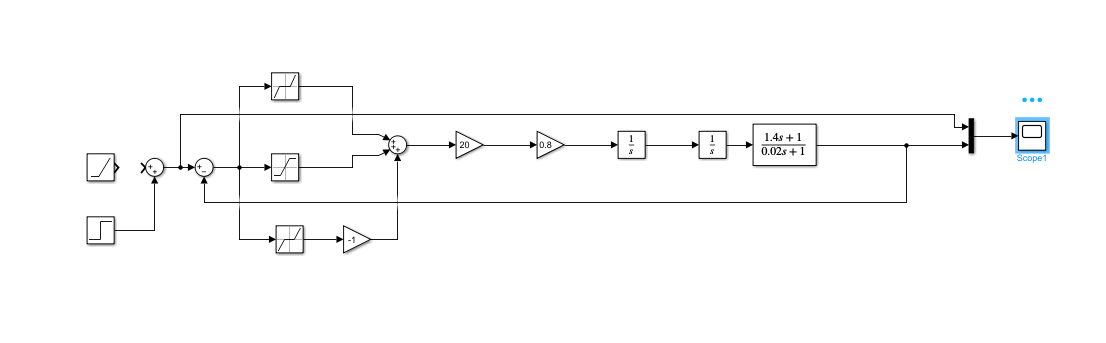
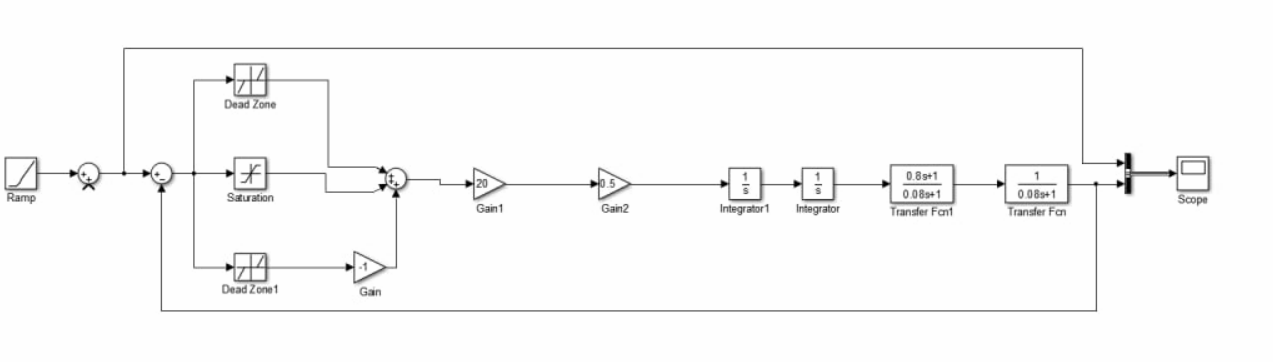
Рисунок 20 – Модель инерционного звена с ООС для реакции на линейно меняющееся воздействие

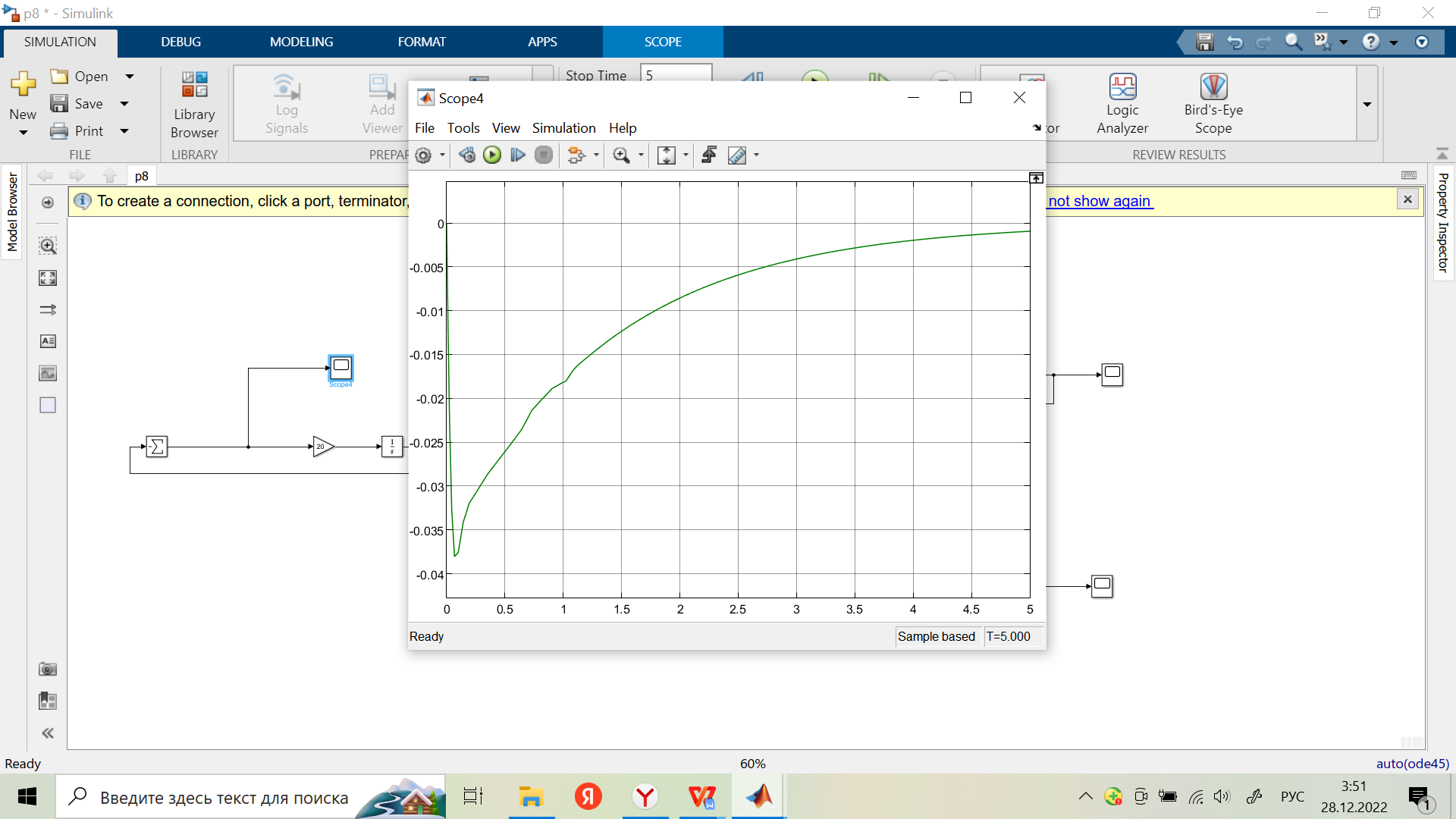
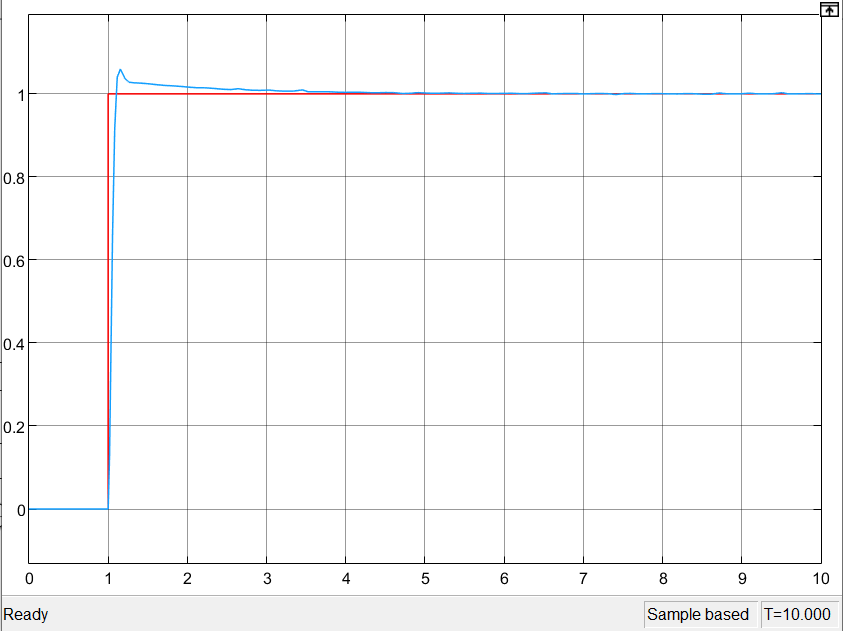
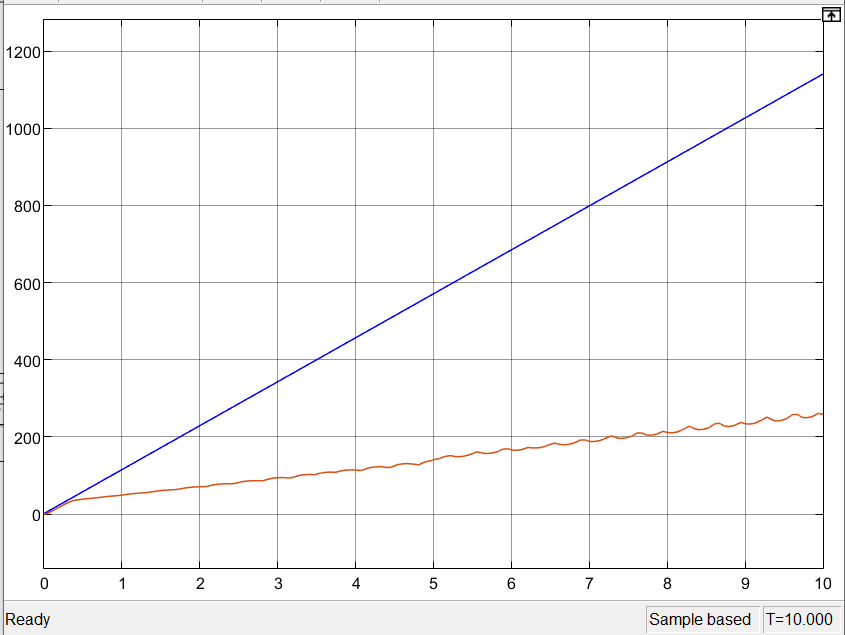
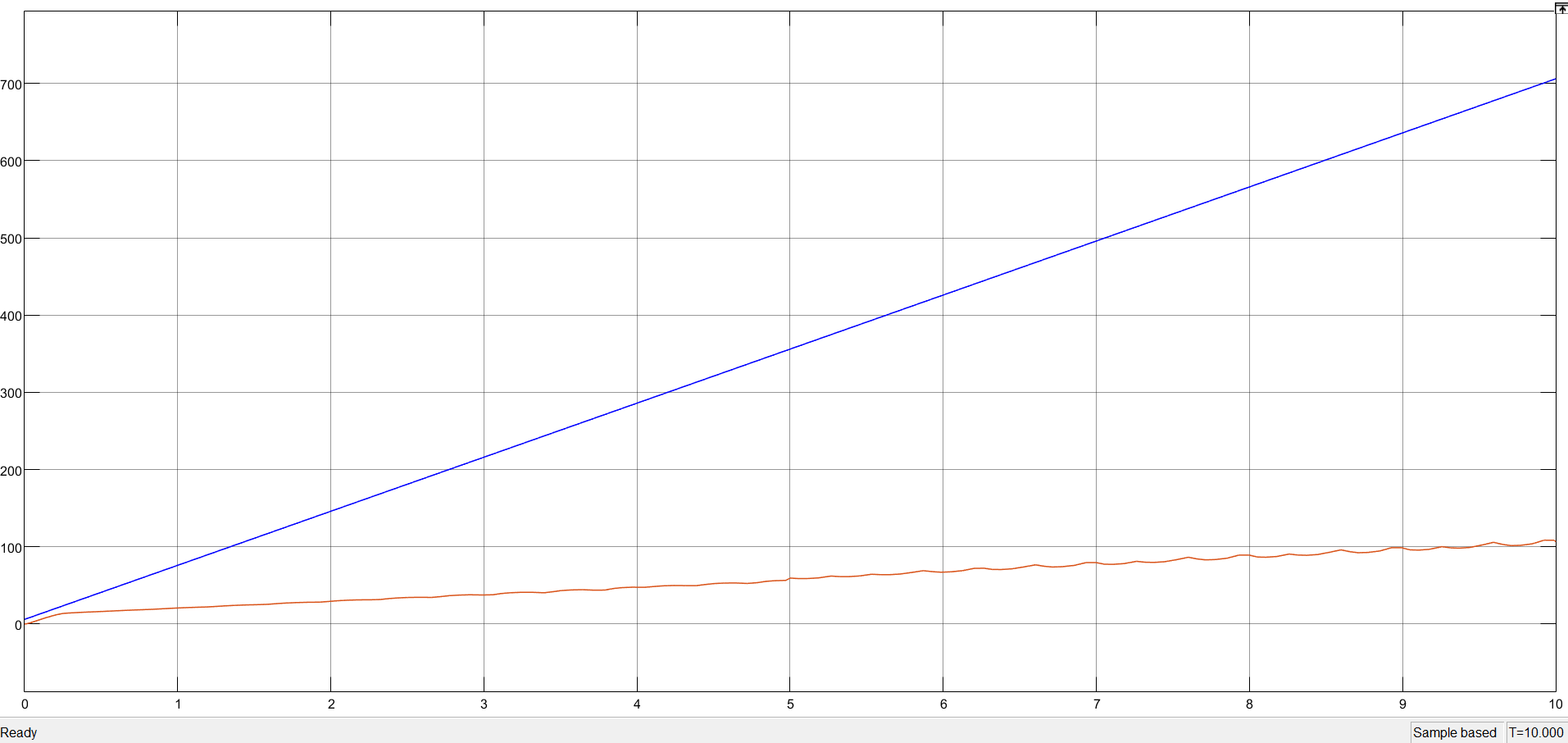
Рисунок 21 – Реакция на линейно меняющееся воздействие l(t)
6. Исследование нескорректированной замкнутой системы.
K=18
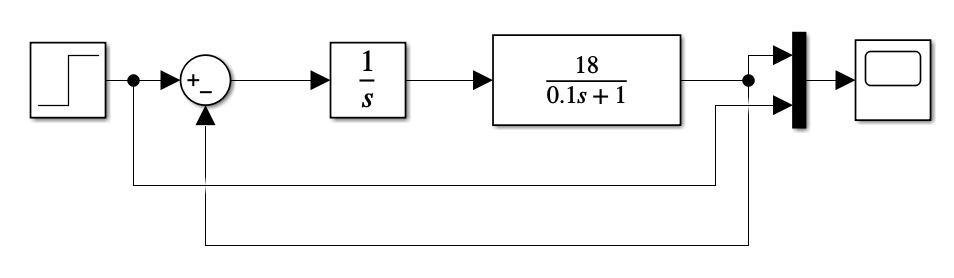
Рисунок 22
Переходная характеристика K=18
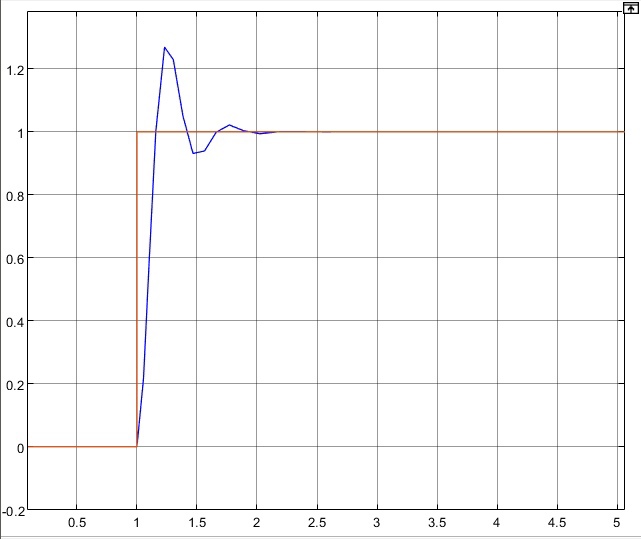
Рисунок 23
K=0.05
Рисунок 24
Переходная характеристика K=0.05
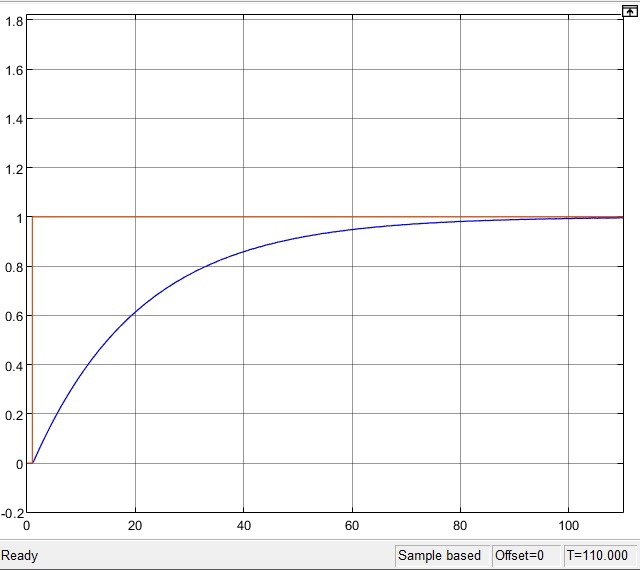
Рисунок 25
К=1

Рисунок 26
Переходная характеристика К=1
Рисунок 27
| K | 1 | 0.05 | 18 |
 | 6 | 0 | 24.5 |
 | 11.55 | 100 | 1.77 |
Кф=5,5
7. Определяем минимально допустимую величину порядка астатизма системы относительно задающего воздействие и её коэффициента усиления, а также частоту среза, обеспечивающее заданные показатели качества:
Определяем качество интегрирующих звеньев – порядок астатизма:
Xв
Параметры желаемой системы:
 =
=
Значения ошибок:
Xмв1(t)=0.04B; Xмв2(t)=2град; Кд=0,5В/град.
Хмв1(S)=0.04/S; Xмв2=2/s
1.
2.
Суммарная ошибка


 ds
ds ;
;


400*

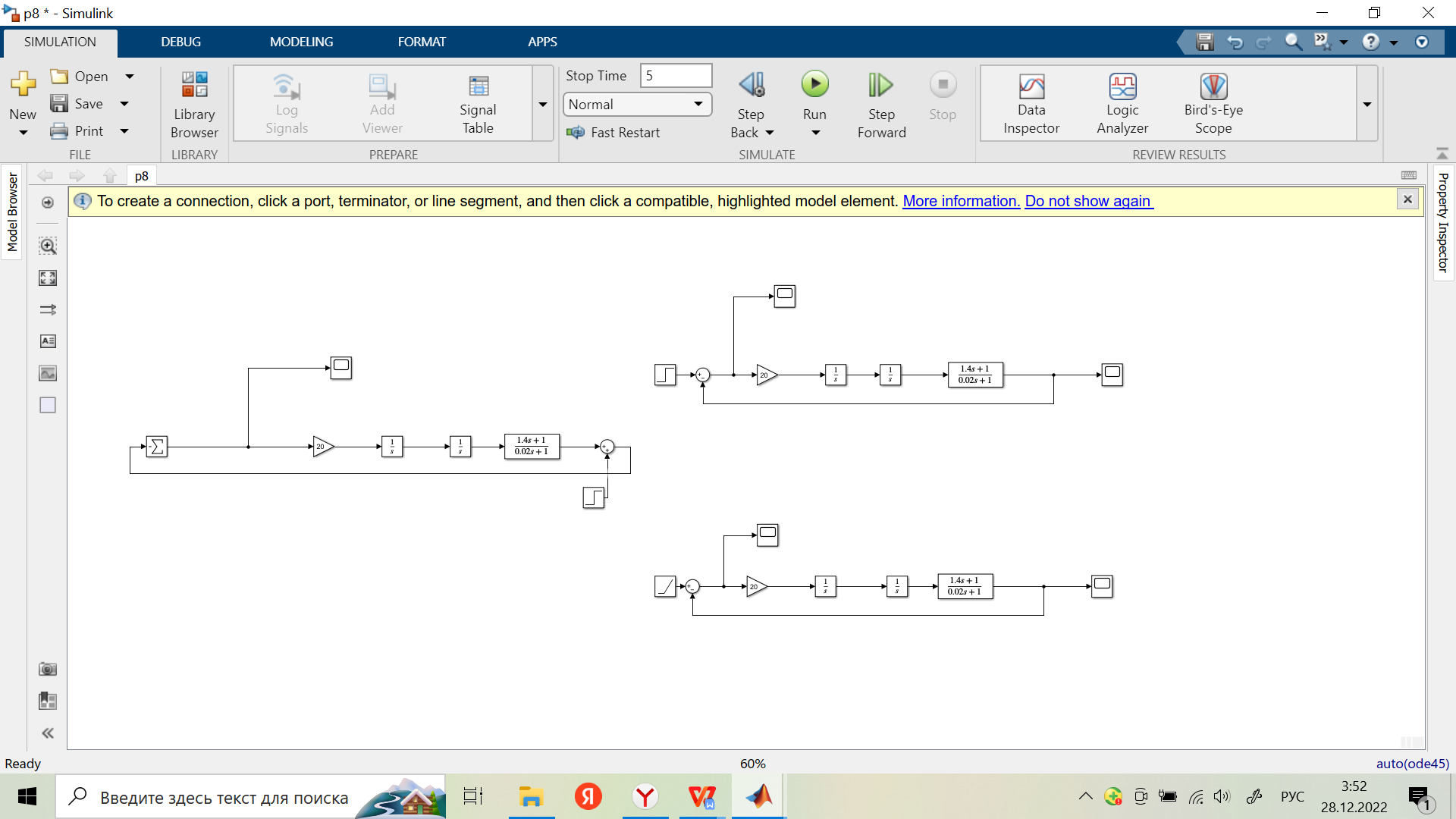
8. Исследование переходной характеристики системы при ступенчатом задающем воздействии:
-
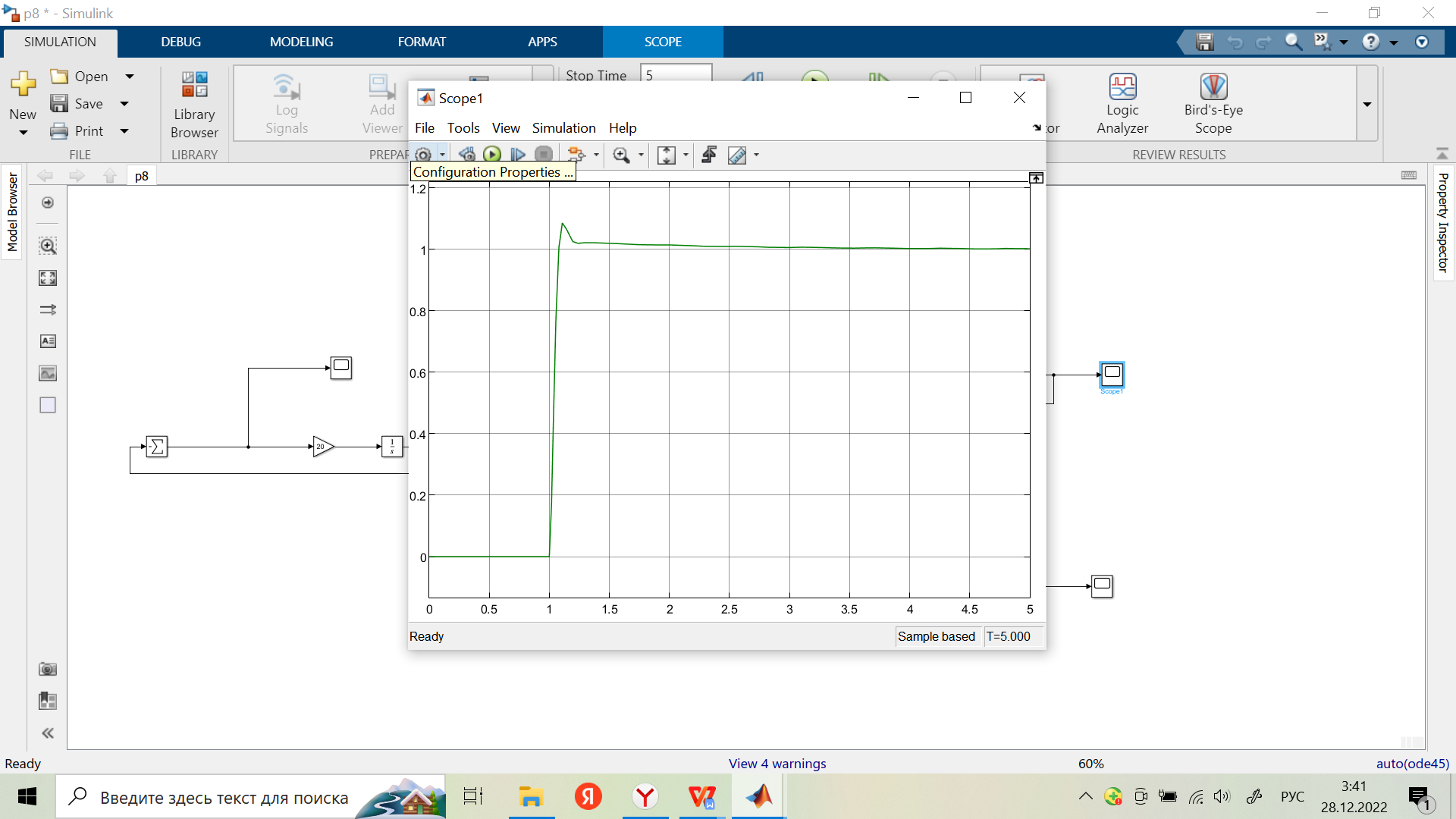
Скорректированная замкнутая система на ступенчатое воздействие:
Переходная характеристика:
Оценивание значения установившейся ошибки и получения переходной характеристики при реакции скорректированной системы на ступенчатое воздействие:
-
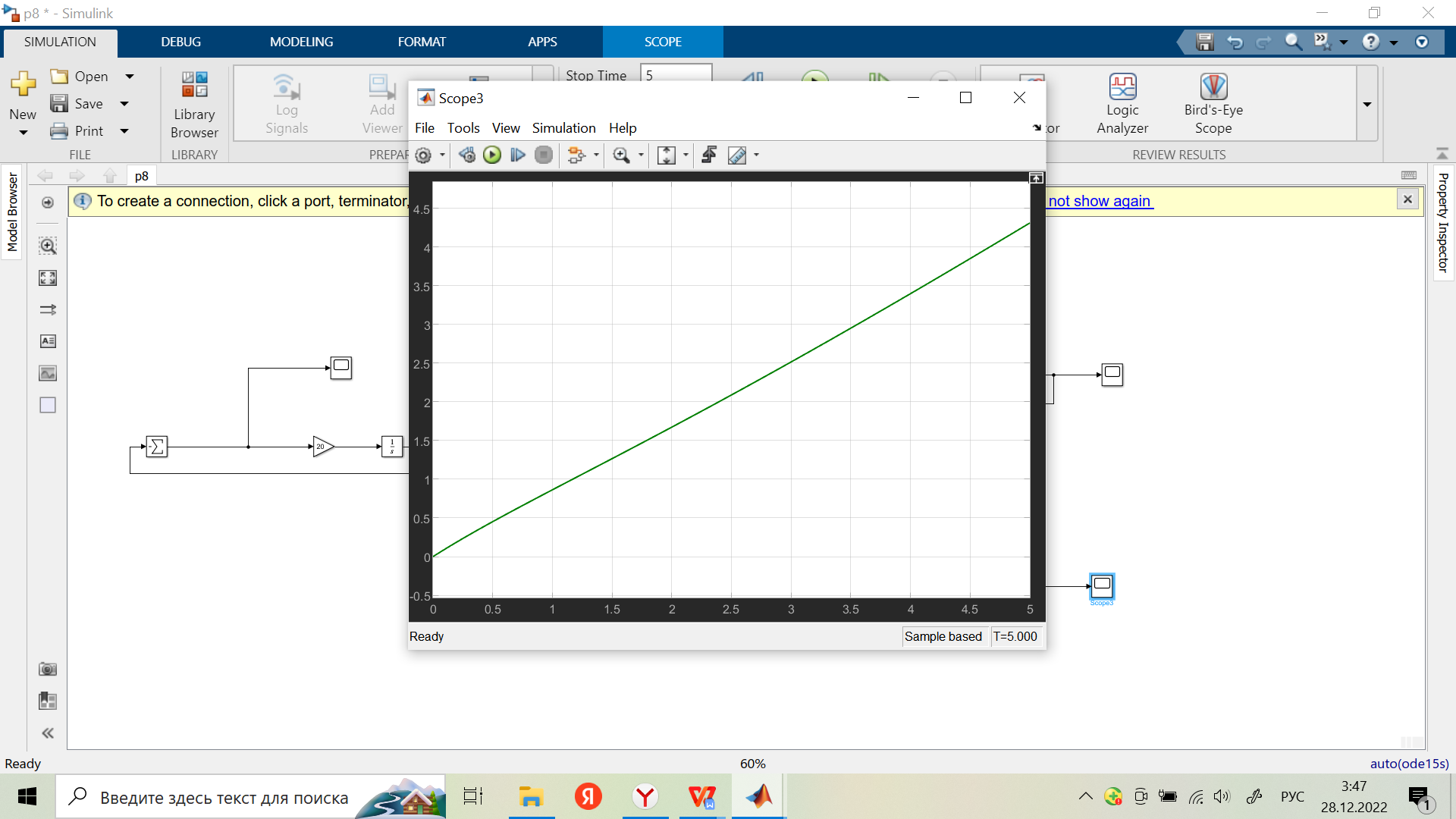
Скорректированная замкнутая система на линейно меняющееся воздействие:


Переходная характеристика:

Оценивание значения установившейся ошибки и получения переходной характеристики при реакции скорректированной системы на линейно меняющееся воздействие:
-
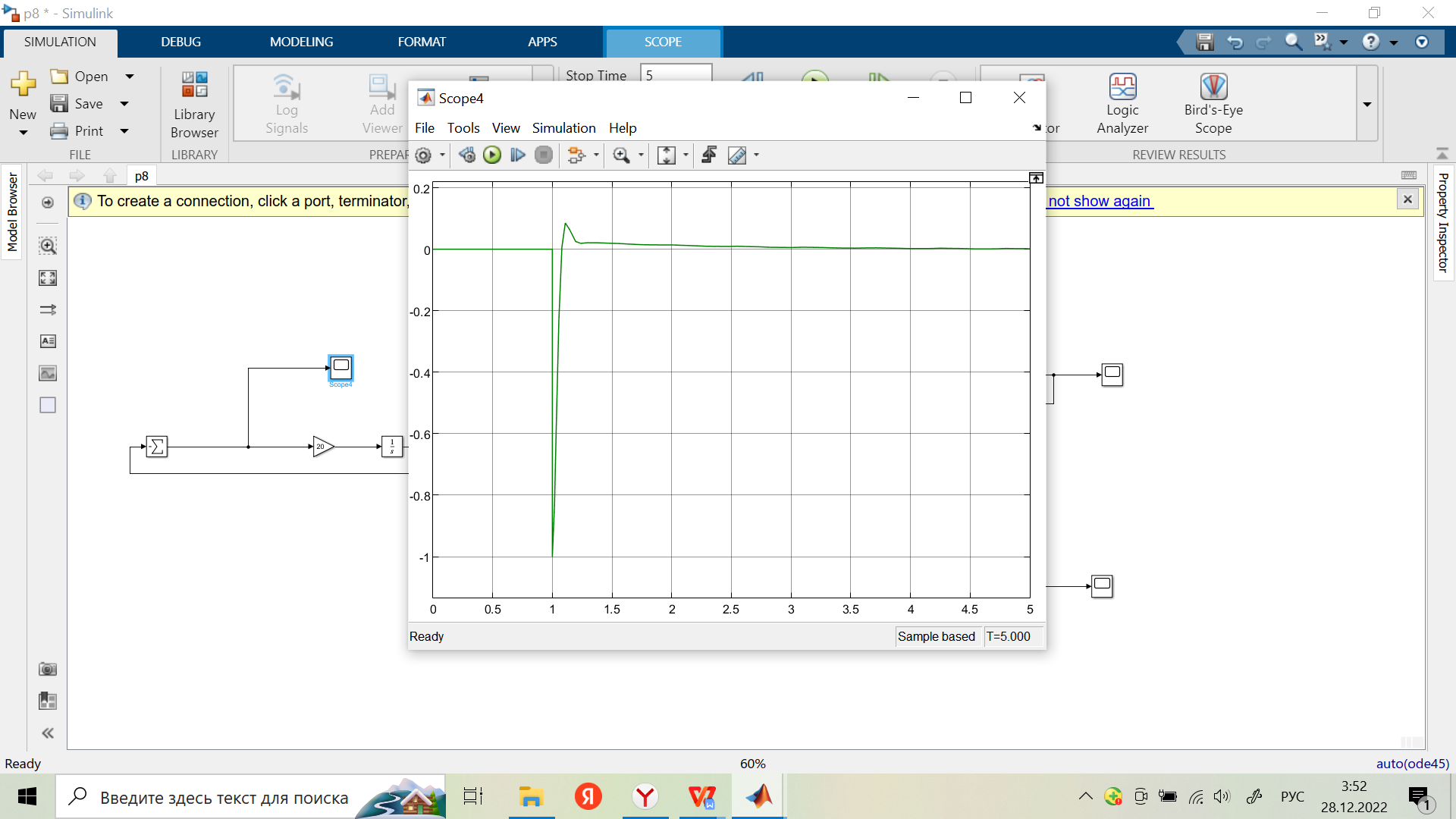
Скорректированная замкнутая система на ступенчатое воздействие при Хмв2(t), при Хвх.в(t)=0:
Переходная характеристика:
-
Скорректированная замкнутая система на линейно меняющееся воздействие при Хмв2(t), при Хвх.в(t)=0:
Переходная характеристика:
9. Рассмотрим скорректированную систему по варианту после включения в нее нелинейного звена как непрерывную и нелинейную:
Звено НЗ1:
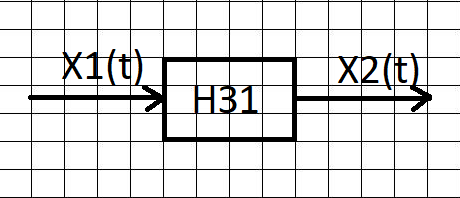
Рисунок 41
Представление звена НЗ1, как сумма простых звеньев:

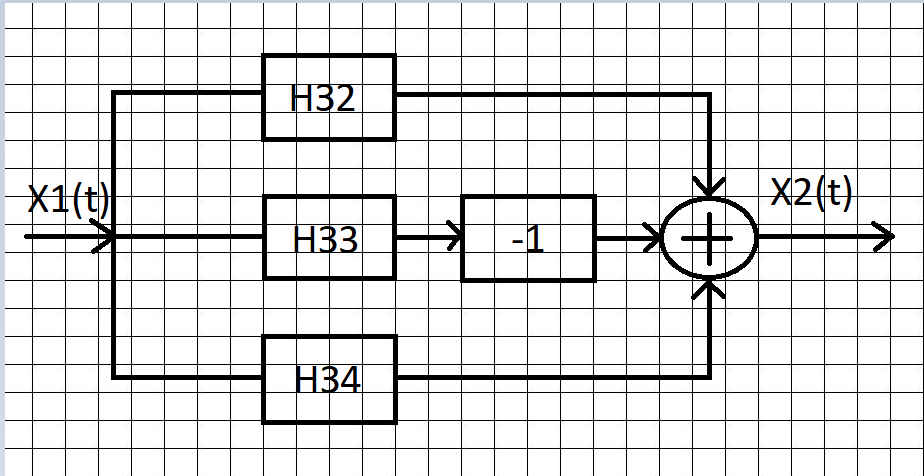
Рисунок 42

Статистические характеристики звеньев:
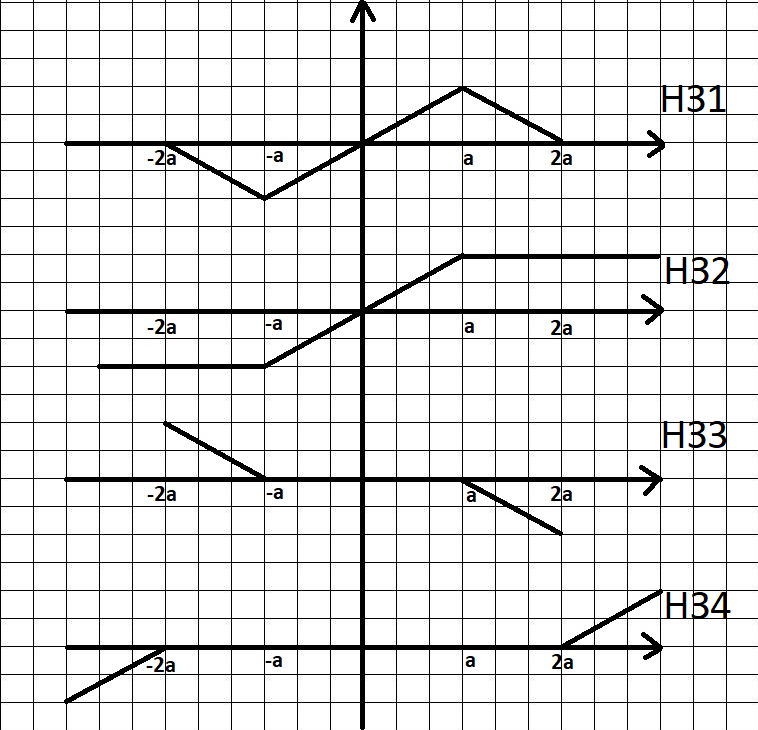
Рисунок 42

где



Таким образом,

Следовательно,

Построение зависимостей эквивалентных нормированных коэффициентов передачи от A/a.
Зависимость для первого звена – НЗ1:
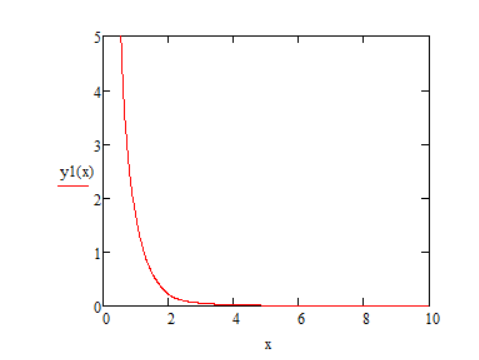
Рисунок 43
Зависимость коэффициента передачи первого звена –
 :
: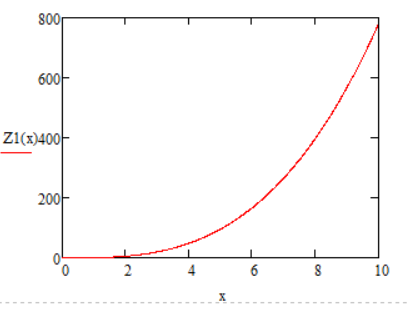
Рисунок 44
Зависимость логарифма коэффициента передачи первого звена –
 :
:
Рисунок 45
 Зависимость для второго звена – НЗ2:
Зависимость для второго звена – НЗ2: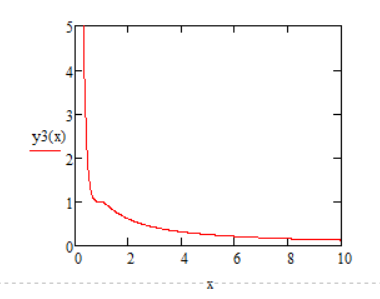
Рисунок 46
Зависимость коэффициента передачи второго звена –
 :
: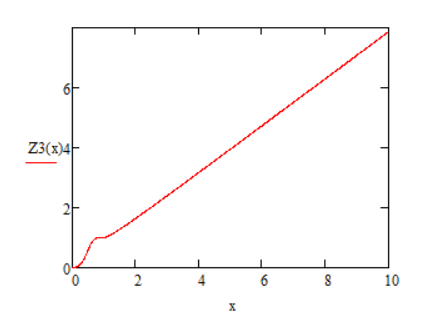
Рисунок 47
Зависимость логарифма коэффициента передачи второго звена –
 :
: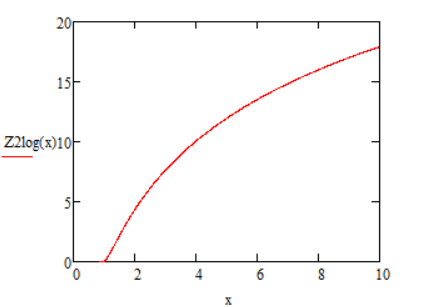
Рисунок 48
 Рассчитываем для системы с S-образной треугольной характеристикой предельные значения задающего воздействия.
Рассчитываем для системы с S-образной треугольной характеристикой предельные значения задающего воздействия.

10. Исследуем на лабораторной установке режим срыва слежения в замкнутой нелинейной системе по варианту и:
Схема собранной нелинейности и осцилограмма при подаче на нелинейность линйено возрастающиего воздействия:
Рисунок 49
Осциллограмма при подаче на нелинейность линейно возрастающего воздействия:
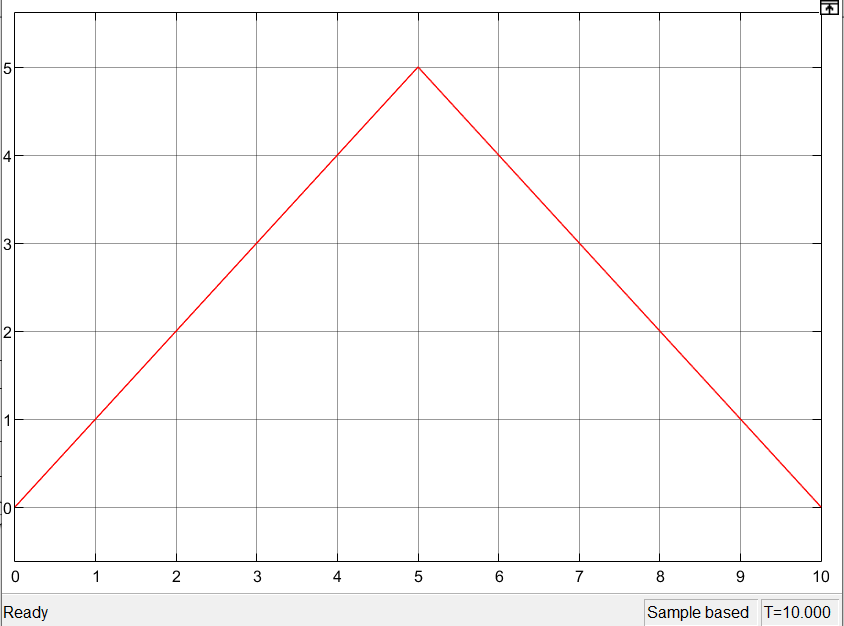
Схема замкнутой системы с нелинейной частью при ступенчатом воздействии:
Осциллограмма без изменения уровня ступенчатого воздействия:
Осциллограмма при срыве слежения при амплитуде блока Slop =10:

Схема замкнутой системы с нелинейной частью при линейном воздействии:
Осциллограмма без изменения угла наклона линейного воздействия:
О
 осциллограмма при срыве слежения угол наклона линейного воздействия Final Value =114:
осциллограмма при срыве слежения угол наклона линейного воздействия Final Value =114:Схема замкнутой системы с нелинейной частью при сумме ступенчатого и линейного воздействия:

Осциллограмма при параметрах Slope=70 и Final Value=5:
11. Составим импульсную систему, путем добавления к скорректированной системе импульсного П-образного элемента:
Непрерывная часть системы:

Передаточная функция формирующего элемента:
Передаточная функция желаемой системы: