ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 19.07.2024
Просмотров: 415
Скачиваний: 1

СОДЕРЖАНИЕ
1. Основные понятия и определения
Глава 2. Первичные преобразователи
6. Фотоэлектрические первичные
Глава 3. Усилители и стабилизаторы
Глава 4. Переключающие устройства и распределители
Глава 5. Задающие и исполнительные устройства
Глава 6. Общие сведения об измерении и контроле
Глава 8. Контроль давления и разрежения
Глава 9. Контроль расхода, количества и уровня
Глава 12. Автоматическая блокировка и защита в системах управления
Глава 13. Системы автоматического контроля и сигнализации
Глава 14. Системы автоматического
Глава 15. Объекты регулирования и их свойства
Глава 17. Конструкции и характеристики регуляторов
Глава 18. Общая характеристика
Глава 19. Математическое и программное обеспечение микроЭвм
Глава 20. Внешние устройства микроЭвм
Глава 21. Применение микропроцессорных систем
Глава 23. Конструкции промышленных роботов
Глава 25. Роботизация промышленного производства
Преимуществом этой системы управления является отсутствие блокировки (так как команды на начало работы подаются только после окончания предыдущей операции), а недостатком — то, что многочисленные первичные преобразователи, работающие в рабочей зоне, нередко выходят из строя вследствие попадания брызг жидкого металла, пыли и масла; кроме того, из-за закорачивания или обрыва электрических цепей могут подаваться неправильные команды.
Смешанные программные системы управления содержат ко- мандоаппарат, а также устройство параллельного контроля исполнения очередных команд. При нормальном протекании цикла вал командоаппарата вращается непрерывно, однако, если очередная команда не будет выполнена, то он останавливается. Несмотря на то, что смешанные системы обладают некоторыми недостатками двух систем, они имеют большие перспективы, как более гибкие и универсальные.
По виду программоносителя, т. е. устройства, содержащего законы движения управляемых механизмов, системы управления бывают: с распределительным валом (командоаппаратом); с упорами и копирами; с числовым программным управлением. В последней системе программа может быть записана на перфолентах, магнитных лентах, дисках и картах.
В настоящее время создана теория электрических схем, элементы которой будут изложены в последующих параграфах. Эта теория позволяет разрабатывать научные и практические приемы построения схем и их анализа и из множества вариантов схем выбирать наиболее оптимальный. Существуют два метода разработки схем управления: интуитивный и аналитический. При использовании как первого, так и второго за основу берется анализ работы механизма, схему управления которым необходимо разработать.
-
ИНТУИТИВНЫЙ МЕТОД РАЗРАБОТКИ СХЕМ УПРАВЛЕНИЯ
Интуитивный метод — метод разработки схем управления, основанный на опыте, накопленном в различных проектных организациях при автоматизации разнообразных механиз-
мов. Он базируется на инженерной интуиции проектанта. В совершенстве владеть этим методом может только тот, кто впитал в себя весь предыдущий опыт и имеет определенные способности в отношении составления схем, кто может абстрактно мыслить и логично рассуждать. Однако, несмотря на его сложность, большинство разработчиков схем широко использует интуитивный метод.
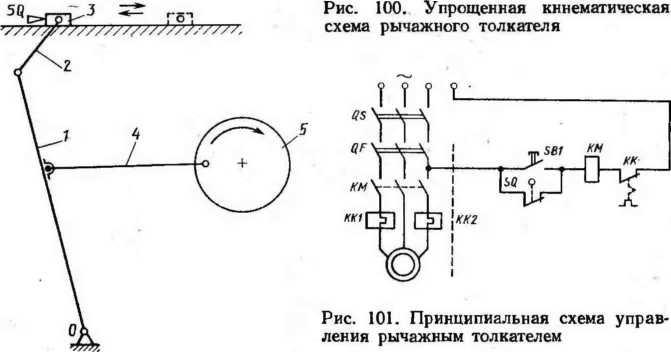
Для примера рассмотрим упрощенную кинематическую схему рычажного толкателя (рис. 100). При вращении колеса 5 по часовой стрелке рычаг 4 поворачивает рычаг 1 вокруг оси О, заставляя тем самым башмак 3 с помощью рычага 2 совершать поступательное движение. При дальнейшем вращении колеса 5 изменяется направление движения рычага /, и башмак возвращается в исходное положение, после чего двигатель должен остановиться. Рассмотренный механизм является типичным представителем двухтактного устройства. В первом такте механизм включен и работает. Во втором такте он не работает. Такт, в котором механизм не работает, называют нулевым. Хотя башмак полностью совершает возвратно-поступательное движение (вперед-назад), для привода можно использовать нереверсивный электродвигатель.
Схема управления электродвигателем рычажного толкателя (рис. 10.1) состоит из двух частей (на рис. 101 они разделены штриховой линией): силовой схемы и схемы управления.
Рассмотрим назначение элементов силовой цепи. Трехфазный ток поступает на выключатель ОБ, обеспечивающий отключение питания электродвигателя в случае ремонта или выхода из строя магнитного пускателя. Далее ток проходит через автоматический выключатель, расцепитель С?/7 которого показан на схеме. Он предназначен для защиты и отключения питания привода при токах короткого замыкания. Главные контакты магнитного пускателя КМ включают или отключают обмотку электродвигателя М.
Тепловые реле КК1 и КК2, нагревательные элементы которых показаны в силовых цепях, предназначены для защиты электродвигателя от длительных перегрузок.'
Схема управления работает следующим образом. При нажатии на пусковую кнопку 5В/ возбуждается катушка магнитного пускателя КМ и, следовательно, замыкаются контакты КМ силовой цепи, и в обмотку двигателя поступает электрический ток. Ротор двигателя приводится1 во вращение, и башмак толкателя начинает свое движение вперед. При этом он отходит от рычага конечного выключателя Б(2, и контакты его замыкаются. Когда пусковая кнопка БВ1 будет отпущена и ее контакты разомкнутся, катушка КМ магнитного пускателя будет получать питание электрическим током через контакты конечного выключателя БС}. Совершив движение вперед и затем назад, башмак толкателя нажмет на рычаг конечного выключателя 3(2, контакты его разомкнутся, и катушка КМ обесточится. Это приведет к размыканию контактов КМ в силовой це'пи и остановке электродвигателя.

Рассмотренная схема содержит силовые цепи и цепи управления. В дальнейшем будут рассматриваться только схемы управления. 1
По функции, т. е. по назначению, Все элементы, участвующие в работе схемы, можно разделить на +ри группы: управляющие контакты, промежуточные элементы й: исполнительные элементы.
Управляющими контактами называются элементы, с помощью которых подаются команды (кнопки управления, переключатели, конечные выключатели, первичные преобразователи, контакты реле и др.).
Само название промежуточные элёменты говорит о том, что они занимают промежуточное положение между управляющими и исполнительными элементами. В релейно-контактных схемах к ним относятся реле времени и промежуточные реле, а в бесконтактных схемах — логические элементы.
Исполнительные элементы — это исполнительные механизмы. Однако при разработке схем управления используются не сами исполнительные механизмы (электродвигатели или нагревательные элементы), а включающие их устройства, т. е. магнитные пускатели, контакторы и т. п.
Все управляющие контакты по их функциональному принципу делятся на пять видов: пусковой контакт кратковременного действия (ПК); пусковой контакт длительного действия (ПД); остановочный контакт кратковременного действия (ОК); остановочный контакт длительного действия (ОД); контакт пуск — остановка (ПО). Эти контакты называют основными.
Циклограммы работы всех типовых контактов при управлении циклическими механизмами приведены на рис. 102. Каждый из пяти контактов начинает работу (замыкаегся) и заканчивает ее (размыкается) в определенные моменты времени. Так, пусковые контакты начинают свою работу вместе с началом рабочего хода,
Рис. 102. Циклограмма работы управляющих контактов
но контакт ПЬС заканчивает свою работу во время рабочего хода, ПД — во время паузы, т. е. они отличаются друг от друга только моментами выключения (размыкания). Остановочные контакты, которые в отличие от пусковых заканчивают свою работу одновременно с концом рабочего хода, различаются моментами включения (замыкания). Остановочный контакт О К начинает свою работу во время рабочего хода, а контакт ОД — в период паузы. Только контакт ПО начинает свою работу вместе с началом рабочего хода и заканчивает с его концом.
С помощью рассмотренных пяти основных контактов можно получить четыре схемы управления исполнительными и промежуточными элементами, которые получили название типовых схем (рис. 103).
Первая типовая схема (рис. 103, а) имеет только один управляющий контакт ПО. Если он замкнут, то через исполнительный элемент X протекает электрический ток, а если разомкнут, то ток отсутствует. Контакт ПО имеет свое самостоятельное значение, а все остальные контакты должны быть использованы парами (пусковой и остановочный).
Вторая типовая схема имеет два управляющих контакта
длительного действия: ПД и ОД (рис. 103, б).
Третья типовая схема состоит из пускового контакта ПК
и остановочного контакта ОД; кроме управляющих контактов
в эту схему обязательно должен быть включен блокировочный контакт х, через который исполнительный элемент X будет продолжать получать питание после размыкания пускового контакта ПК (рис. 103, в).
Ч етвертая
типовая схема базируется на двух
контактах кратковременного действия:
пусковом ПК
и остановочном ОК,
включенных параллельно (рис. 103, г).
етвертая
типовая схема базируется на двух
контактах кратковременного действия:
пусковом ПК
и остановочном ОК,
включенных параллельно (рис. 103, г).
Рис. 103. Типовые схемы управление исполнительными и промежуточными схемами
Приведенные четыре типовые схемы позволяют (как бы из кубиков) составлять сложные параллельно-последовательные контактные схемы управления. Так, например, рассмотренная схема управления рычажным толкателем (см. рис. 101) основана на четвертой типовой схеме. В ней в качестве пускового контакта кратковременного действия используют пусковые кнопки БВ1, а в качестве остановочного контакта кратковременного действия — конечный выключатель Б(2.
При составлении схемы управления интуитивным методом необходимо правильно определить тип управляющего контакта, т. е. длительность его действия.
Рассмотрим пример разработки интуитивным методом схемы управления с помощью типовых схем.
Пусть требуется разработать полуавтомат для управления индуктором и спреерным устройством установки, предназначенной для нагрева изделия токами высокой частоты и последующего его охлаждения струями воды. Время нагрева изделия в индукторе 12 с, а время охлаждения 8 ч. Изделие устанавливают в индуктор вручную.
Сначала проведем анализ работы полуавтомата и определим все исполнительные и промежуточные элементы. Рабочий вручную устанавливает изделие в индуктор и нажимает на пусковую кнопку. В этот момент включается индуктор и начинается нагрев изделия. Одновременно должно включиться и реле времени, отсчитывающее время нагрева (12 с). Это реле времени (точнее, его контакты) выключает индуктор и включает спреерное устройство, подающее воду для закалки. Одновременно должно включиться второе реле, отсчитывающее время охлаждения, т. е. отключающее спреерное устройство. Таким образом, необходимо управлять четырьмя элементами: индуктором, спреерным устройством и двумя реле времени. Индуктор включается и выключается с помощью контактора, следовательно, необходимо управлять последним. Спреерное устройство управляется электромагнитным краном. Обозначим катушку (обмотку) контактора КМ1, катушку электромагнитного крана КМ2, а катушки реле времени соответственно КТ1 и КТ2. Таким образом, мы имеем два исполнительных элемента: КМ1 и К М2, и два промежуточных элемента: КТ1 и КТ2.
Из проведенного анализа следует, что сначала должен начаться нагрев, т. е. возбудится катушка КМ1. В качестве пускового контакта используется пусковая кнопка Б В (кратковременного действия). Таким образом, применима либо третья, либо четвертая типовая схема. Пусть индуктор выключается контактами реле времени КТ 1.1, которые в данном случае являются контактами длительного действия. Поэтому выбираем третью типовую схему. Одновременно с катушкой магнитного пускателя КМ1 необходимо включить реле времени КТ1, что очень просто сделать, соединив их параллельно.
Рис.
104. Схемы управления:
а
— индуктором и реле времени нагрева;
б
— спреериым устройством и реле времена
охлаждения; е
установки в целом
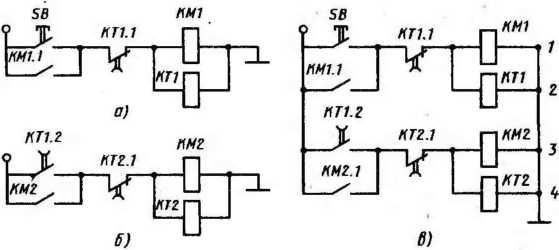
Рассмотрим работу полученной схемы (рис. 104, а). При нажатии на пусковую кнопку 5В возбуждается катушка контактора КМ1, т. е. начинается нагрев изделия. Одновременно возбуждается катушка реле времени КТ1 и начинается отсчет времени нагрева. С помощью блокировочного контакта КМ 1.1 напряжение на катушке КМ1 будет удерживаться и после отпускания пусковой кнопки БВ, т. е. после размыкания ее контактов. По истечении времени нагрева сработает реле времени КТ1, его контакт КТ1.1 разомкнется. Это приведет к обесточиванию катушки КМ1 (нагрев изделия закончится). Теперь необходимо включить спре- ерное устройство. Его включить может реле времени КТ1 путем замыкания контакта. Включив спреерное устройство, реле времени КТ1 отключается. Следовательно, замыкающий контакт КТ 1.1 будет являться контактом кратковременного действия. Поэтому вновь воспользуемся третьей типовой схемой.