ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 19.07.2024
Просмотров: 407
Скачиваний: 1

СОДЕРЖАНИЕ
1. Основные понятия и определения
Глава 2. Первичные преобразователи
6. Фотоэлектрические первичные
Глава 3. Усилители и стабилизаторы
Глава 4. Переключающие устройства и распределители
Глава 5. Задающие и исполнительные устройства
Глава 6. Общие сведения об измерении и контроле
Глава 8. Контроль давления и разрежения
Глава 9. Контроль расхода, количества и уровня
Глава 12. Автоматическая блокировка и защита в системах управления
Глава 13. Системы автоматического контроля и сигнализации
Глава 14. Системы автоматического
Глава 15. Объекты регулирования и их свойства
Глава 17. Конструкции и характеристики регуляторов
Глава 18. Общая характеристика
Глава 19. Математическое и программное обеспечение микроЭвм
Глава 20. Внешние устройства микроЭвм
Глава 21. Применение микропроцессорных систем
Глава 23. Конструкции промышленных роботов
Глава 25. Роботизация промышленного производства
В)
—-чА
г)
Качество переходного процесса оценивается с помощью следующих параметров: длительности переходного процесса тцер, по истечении которого разность между заданным и текущим значениями регулируемой величины не превышает 5 %, и величины перерегулирования
а = (Хтах - Х0)/Х0, и.
где Х,ш,х и Х0 — максимальное и заданное значения регулируемой величины. Оптимальным считается, если а — 20 %, а число колебаний за время переходного процесса не превышает трех.
Существуют различные способы определения устойчивости системы: аналитический, экспериментальный и другие. оп
Аналитический способ заключается в решении уравнений, описывающих систему автоматического регулирования. Существуют три основных критерия устойчивости: критерий Рауса— Гурвица, критерий Михайлова и критерий Найквиста—Михайлова.
Критерий устойчивости Рауса—Гурвица позволяет судить об устойчивости системы по коэффициентам ее характеристического уравнения. Необходимым условием устойчивости систем автоматического регулирования является положительность всех коэффициентов характеристических уравнений этих систем.
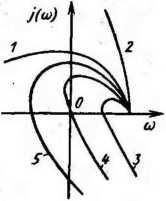
Рис. 125. Годографы замкнутых систем регулирования
Критерий устойчивости Михайлова — это
частотный критерий, основанный на построении по характеристическому уравнению системы характеристической кривой (или годографа), по виду которой судят по устойчивости систем автоматического регулирования.
Критерий Михайлова формулируется следующим образом: система устойчива, если годограф Михайлова / при изменении частоты © от 0 до +оо, начинаясь на положительной части вещественной полуоси, огибает против часовой стрелки начало координат, нигде не обращаясь в нуль, проходя последовательно такое количество квадрантов комплексной плоскости, какова степень Характеристического уравнения.
На рис. 125 годографы 1, 2, 5 характеризуют устойчивую, а годограф 3 — неустойчивую, 4 — «граничную» системы.
Критерий устойчивости Найквиста—Михайлова позволяет су- Дйть об устойчивости замкнутой системы регулирования по амплитудно-фазовой частотной характеристике разомкнутой системы, что дает возможность использовать для оценки устойчивости результаты исследований.
В целом качество регулирования характеризуется тремя показателями: затратой времени на затухание обнаруженного возмущения; максимальным отклонением регулируемой величины от заданного значения; статической ошибкой. Однако нормативы на эти виды показателей отсутствуют. Их оптимальное значение определяют опытным путем для каждого объекта; при. этом надо стремиться, чтобы сократить переходный период и уменьшить статическую ошибку.
Повысить качество регулирования можно увеличением устойчивости регулирования и применением так называемых дифференцирующих устройств, измеряющих скорость изменения регулируемой величины. Повышение устойчивости систем автоматического регулирования возможно за счет подбора скорости регулирования, чувствительности первичного преобразователя, уменьшения времени регулирования и т. д. и
Контрольные вопросы а задания
- -ь
к/ 1. Дайте определение системы автоматического регулирования. Какое регулирование называют ручным и какое автоматическим?
-
Расскажите о структурной схеме системы автоматического регулирования.
3 Какие элементы используются в системах автоматического регулирования?
-
Расскажите о видах обратной связи в системах регулирования? л 5. Расскажите о принципах регулирования.
-
Как классифицируются системы автоматического регулирования?
-
Расскажите о стабилизирующих система» автоматического регулирования.
-
Чем отличаются программные системы регулирования от стабилизирующих?
-
Изложите принцип действия следящих систем автоматического регулирования.
-
Изложите принципы действия кибернетических систем регулирования.
-
Перечислите качественные показатели систем автоматического регулирования и дайте им характеристики.
-
Дайте определение устойчивости системы автоматического регулирования.
-
Расскажите о способах определения устойчивости замкнутых систем.
-
Как определяется устойчивость разомкнутых систем?

Глава 15. Объекты регулирования и их свойства
-
ОБЩИЕ СВЕДЕНИЯ
Объект регулирования является основной частью системы автоматического регулирования, свойства которого оказывают влияние на качество регулирования и выбор типа регулятора.
К наиболее распространенным объектам регулирования в литейных и термических цехах относятся тепловые устройства (плавильные, нагревательные и сушильные печи), в которых требуется регулировать температуру, расход воздуха, топлива или электрической энергии; установки по приготовлению формовых и стержневых смесей; установки для получения контролируемых атмосфер, где необходимо регулировать одновременно температуру, влажность или состав газовой фазы, и т. д.
Любой объект регулирования характеризуется количеством энергии или вещества, проходящего через него. Режим работы объекта определяется протекающими внутренними процессами, на характер которых влияют внешние воздействия. В системе автоматического регулирования часть внешних воздействий дает ей информацию о задачах регулирования. Поэтому их называют полезными (регулирующими) воздействиями. Они либо вырабатываются регулятором, либо задаются оператором. Воздействия на объект, не связанные с задачей регулирования, называют возмущениями. Именно из-за существования возмущений возникает необходимость регулирования. Природа возмущений всегда носит случайный характер. Например, это может быть понижение температуры нагревательной или плавильной печей из-за случайного открытия дверки, увеличение запыленности воздуха из-за открытия въездных ворот и т. п.
Если объект имеет одну регулируемую величину, то он относится к простым, или одномерным-, при наличии нескольких регулируемых величин его называют многомерным.
Различают два вида объектов регулирования: стационарные, у которых характеристики не изменяются во времени или изменяются незначительно, и нестационарные, характеристики которых изменяются во времени.
В качестве примера объекта регулирования рассмотрим лабораторную нагревательную печь, у которой регулируемой величиной является температура рабочего пространства. К числу внешних возмущений этого объекта относится масса загруженных образцов, частота открытия загрузочной дверки, колебания напряжения электропечи.
Следовательно, объект регулирования — это устройство, заданный режим которого должен поддерживаться регулирующими воздействиями регулятора извне. Для создания системы регулирования необходимы четкие представления о свойствах объекта. Знание этих свойств необходимо также и для выбора технических средств измерения контролируемых и регулируемых величин, элементов регуляторов и их настроек.
-
ПАРАМЕТРЫ ОБЪЕКТОВ РЕГУЛИРОВАНИЯ
К основным параметрам, определяющим свойства объектов регулирования, относятся: нагрузка, емкость, самовырав- н'ивание, инерционность и запаздывание, время разгона и постоянная времени объекта.
Нагрузка. Любой объект регулирования характеризуется нагрузкой, т. е. количеством энергии или вещества, которое расходуется в этом объекте для проведения заданного технологического процесса, например количеством топлива, подаваемого К горелкам печей, количеством электроэнергии, подводимой к электродам дуговых плавильных печей, и т. п.
Нагрузка характеризует производительность или пропускную способность объекта при установившемся состоянии контролируемого процесса.
Значительные колебания нагрузки вызывают изменения регулируемой величины. Однако для процесса регулирования имеет значение не абсолютное значение нагрузки, а.диапазон и характер ее изменения во времени. Чем медленнее изменяется нагрузка и ■ чем меньше ее диапазон, тем легче регулировать объект, и наоборот.
Емкость. Подавляющее большинство видов оборудования литейных и термических цехов (плавильные и нагревательные печи, охлаждающие баки, сушильные установки и т. д.) способны накапливать (аккумулировать) энергию и вещество. Такое накопление возможно благодаря тому, что в каждом объекте имеется сопротивление выходу энергии и вещества (кладка печи, заслонка и шибер и т. д.).
Емкостью регулируемого объекта называют запас накопленной энергии или вещества. Так, например, при. регулировании температуры плавильной печи ее емкость по отношению к регулируемой величине (температуре) будет характеризоваться количеством тепла, накопленном в кладке, в жидком металле и в газах, заполняющих рабочее пространство печи.
Емкость объекта зависит от его размеров. Так, например, при регулировании уровня жидкости в закалочном баке емкость объекта зависит от вместимости бака. Чем больше вместимость бака, тем медленнее будет изменяться уровень при нарушении соответствия между приходом и расходом жидкости. В объекте с большей емкостью регулируемая величина при возмущении медленнее изменяет свое значение, и регулирование протекает более устойчиво.