ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 19.07.2024
Просмотров: 243
Скачиваний: 1

СОДЕРЖАНИЕ
1. Основные понятия и определения
Глава 2. Первичные преобразователи
6. Фотоэлектрические первичные
Глава 3. Усилители и стабилизаторы
Глава 4. Переключающие устройства и распределители
Глава 5. Задающие и исполнительные устройства
Глава 6. Общие сведения об измерении и контроле
Глава 8. Контроль давления и разрежения
Глава 9. Контроль расхода, количества и уровня
Глава 12. Автоматическая блокировка и защита в системах управления
Глава 13. Системы автоматического контроля и сигнализации
Глава 14. Системы автоматического
Глава 15. Объекты регулирования и их свойства
Глава 17. Конструкции и характеристики регуляторов
Глава 18. Общая характеристика
Глава 19. Математическое и программное обеспечение микроЭвм
Глава 20. Внешние устройства микроЭвм
Глава 21. Применение микропроцессорных систем
Глава 23. Конструкции промышленных роботов
Глава 25. Роботизация промышленного производства
Любое техническое устройство, воздействующее на объект управления в соответствии с алгоритмом управления, называют автоматическим управляющим устройством.
Совокупность автоматического управляющего устройства и объекта управления, связанных и взаимодействующих между собой в соответствии с алгоритмом управления, называют системой автоматического управления (САУ). В процессе работы система автоматического управления испытывает на себе различные внутренние и внешние воздействия. Внутренние воздействия — это такие, которые передаются от одной части автоматической системы к другой, образуя последовательную цепь воздействий, обеспечивающих нормальное протекание технологического процесса. Их называют управляющими воздействиями. Внешние воздействия подразделяются на два вида. Первые, необходимые для нормального протекания технологического процесса, подаются на вход системы в соответствии с алгоритмом функционирования. Их называют задающими воздействиями. Вторые поступают в систему (объект управления) из внешней среды. Они не планируются в работе системы, носят случайный характер и затрудняют управление. Поэтому их называют возмущающими воздействиями.
Значение управляемой величины, которое следует поддерживать в данный момент времени для правильного протекания технологического процесса, называют предписанным {заданным) значением, а фактическое, т. е. измеряемое значение, — действительным (текущим). Разницу между заданным и действительным значениями регулируемой величины называют рассогласованием.
Все виды литейного и термического оборудования должны работать в стационарном (установившемся) режиме. Однако в реальных эксплуатационных условиях установившийся режим постоянно нарушается в результате различных внешних возмущений, что приводит к изменению различных параметров технологического процесса. Поэтому необходимо управлять оборудованием (объектом управления), т. е. вырабатывать управляющее воздействие с таким расчетом, чтобы управляемая величина изменялась бы в соответствии с заданным законом (программой) независимо от влияния на объект возмущающего воздействия. Для плавильных и термических печей управляемая величина — температура, управляющее воздействие — напряжение на электродах или нагревательных элементах, а основным возмущающим воздействием является изменение тепловых потерь.
-
Классификация систем
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Классифицировать системы автоматического управления можно по методу управления и функциональному признаку (рис. 1).
По методу управления все системы делятся на два больших класса: обыкновенные (несамонастраивающиеся) и самонастраивающиеся (адаптивные).
Обыкновенные системы, относящиеся к категории простых, не изменяют своей структуры в процессе управления. Они наиболее разработаны и широко применяются в литейных и термических цехах. Обыкновенные САУ подразделяют на три подкласса: разомкнутые, замкнутые и комбинированные системы управления.
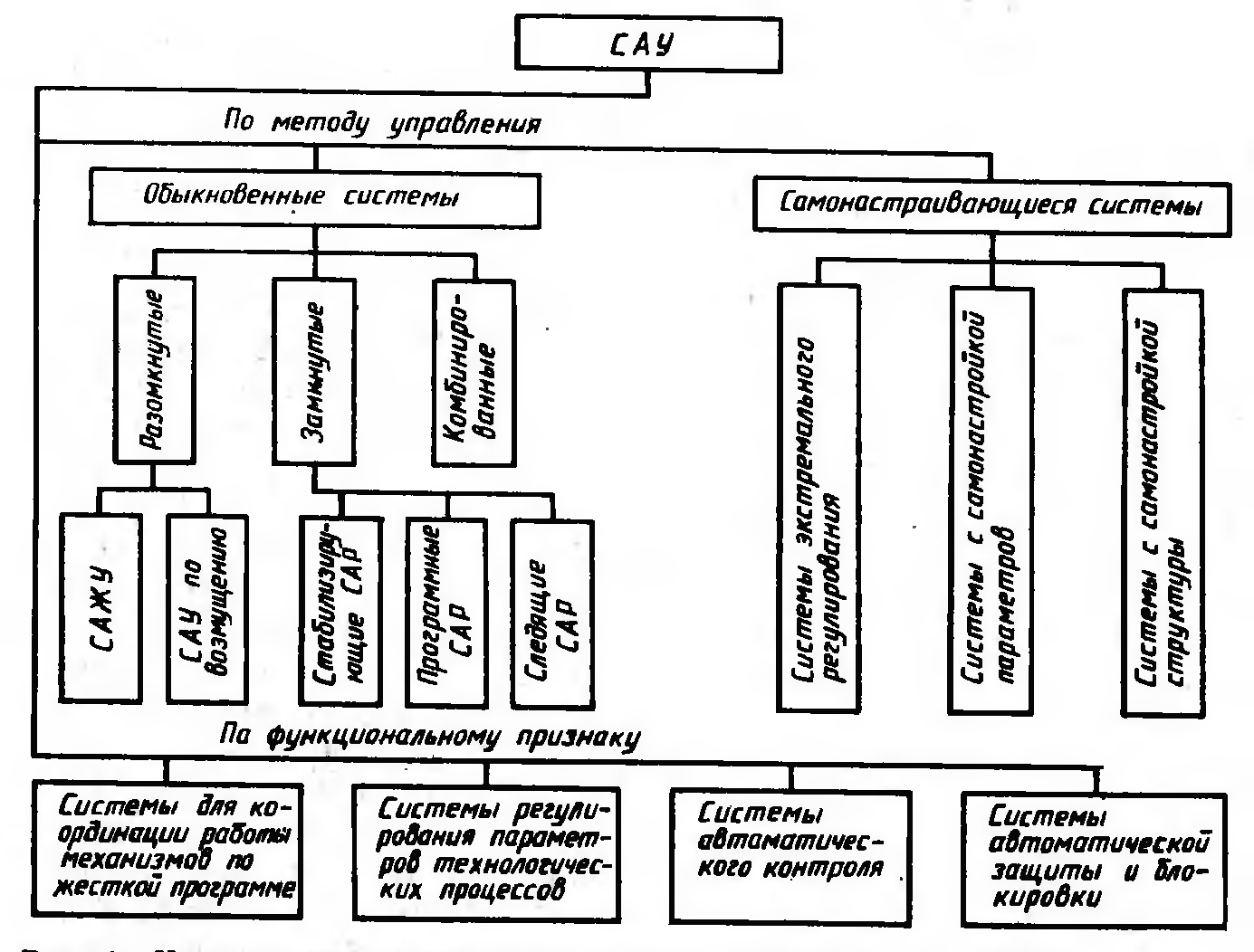
Рис. 1. Классификация систем автоматического управления (САУ)
Разомкнутые САУ в свою очередь делят на системы автоматического жесткого управления (САЖУ) и системы управления по возмущению.
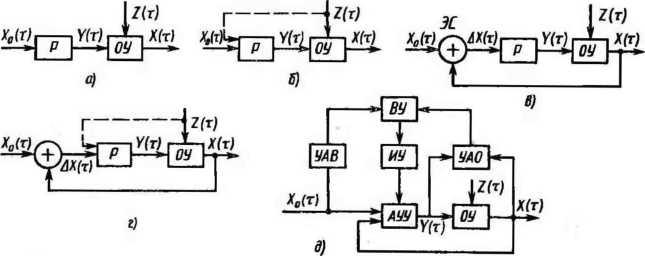
У первых систем регулятор Р (рис. 2, а) воздействует на объект управления ОУ независимо от полученного результата, т. е. значения регулируемой величины X (т) и внешнего возмущения 1 (т). Системы управления по возмущению (рис. 2, б) работают по принципу, когда управляющее воздействие У (т) вырабатывается в зависимости от внешнего возмущения 1 (г), оказывающего влияние на объект управления. В качестве примера можно рассмотреть систему отопления литейного или термического цеха. В этом случае расход горячей воды в теплотрассе цеха зависит от внешних погодных условий. Чем холоднее на улице, тем больше подается горячей воды в батареи отопления, и наоборот.
Замкнутые системы автоматического управления, работающие по принципу отклонения, называют также системами автоматического регулирования (САР). Их отличительной чертой является наличие замкнутого контура прохождения сигналов, т. е. наличие обратного канала, по которому информация о состоянии регулируемой величины X (т) передается на вход элемента сравнения ЭС (рис. 2, в).
Системы автоматического регулирования предназначены для решения трех задач: стабилизации регулируемой величины (стабилизирующая САР), изменения регулируемой величины по известной (программная САР) или неизвестной (следящая САР) программам.
В стабилизирующих САР заданное значение регулируемой величины постоянно. Примером такой системы может служить система регулирования температуры в рабочем пространстве термической печи. В программных САР значение регулируемой величины изменяется во времени по заранее разработанной (известной) программе. В следящих системах заданное значение регулируемой величины изменяется во времени по заранее неизвестной программе. Следящие и программные САР отличаются от стабилизирующих принципом обработки задающего сигнала. Наиболее типичным примером следящего регулирования является автоматическое поддержание заданного соотношения между расходами топлива и воздуха при регулировании процесса горения в топливных плавильных и нагревательных печах.
Комбинированные системы (рис. 2, г) сочетают в себе достоинства систем управления по отклонению и по возмущению, что повышает точность управления. Действие неучтенных возмущений в комбинированных системах компенсируется или ослабляется управлением по отклонению.
Самонастраивающиеся (адаптивные) системы (рис. 2, д) можио разделить на три подкласса: экстремальные системы, системы с самонастройкой параметров и системы с самонастройкой структуры.
Системами экстремального регулирования называют системы стабилизирующего, следящего или программного управления, у которых настройка, программа или закон воспроизведения авто-
Рис.
2. Схемы управления:
а
— разомкнутая; б
— разомкнутая по отклонению; « —
замкнутая; г
— комбинированная; о
— самонастраивающаяся; Р
— регулятор; ОУ
— объект управления; ЭС
— элемент сравнения; УАВ
— устройство анализа задающего
воздействия: ВУ
— вычислительное устройство; И
У -—
исполнительное устройство; АУУ
— автоматическое управляющее
устройство; У
АО —
устройство анализа объекта управления
математически изменяются в зависимости от изменения внешних условий или внутреннего состояния системы с целью создания наи выгоднейшего (оптимального) режима работы объекта управления. В таких системах вместо постоянной настройки или программы устанавливается устройство автоматического поиска, которое проводит анализ какой-либо характеристики объекта (коэффициента полезного действия, производительности, экономичности и т. п.) и в зависимости от полученного результата подает в управляющее устройство требуемое значение регулируемой величины так, чтобы данная характеристика получила экстремальное значение при непрерывном изменении различных возмущающих воздействий, оказывающих влияние на условия работы системы.
В системах с самонастройкой параметров при изменении внешних условий или характеристик объекта регулирования происходит автоматическое (не по заранее заданной программе) изменение варьируемых параметров управляющего устройства с целью обеспечения устойчивой работы системы и поддержания регулируемой величины на заданном или оптимальном уровне.
В системах с самонастройкой структуры при изменении внешних условий и характеристик объекта управления происходит переключение элементов в схеме соединений или введение в нее новых элементов. Целью таких изменений (отбора) структуры является достижение лучшего решения задачи управления. Отбор структуры осуществляется путем автоматического поиска с применением вычислительных и логических операций. Такие системы должны не только приспосабливаться ко всем изменениям внешних условий и характеристик объекта, но и функционировать нормально даже при наличии неполадок или отказов отдельных элементов, создавая новые цепи взамен нарушенных. Системы с самонастройкой структуры можно заставить самосовершенствоваться, «приобретать опыт» путем быстрого опробования нескольких вариантов, отбора и «запоминания» лучшего из них.
Согласно классификации по функциональному признаку все автоматические системы управления подразделяют на четыре класса: системы для координации работы механизмов; системы регулирования параметров технологических процессов; системы автоматического контроля; системы автоматической защиты и блокировки.
Системы, предназначенные для координации работы отдельных механизмов установки или установки в целом, являются системами автоматического жесткого управления (САЖУ). Системы автоматического регулирования (САР) технологических процессов обеспечивают поддержание регулируемой величины на заданном уровне или изменение ее по заданной программе. Системы автоматического контроля (САК) содержат средства и методы для получения информации о текущих значениях параметров технологических процессов (температуры, давления, запыленности или загазованности воздуха и др.) без непосредственного участия человека. Системы автоматической защиты (САЗ) и блокировки (САБ) предотвращают возникновение аварийных ситуаций в работе оборудования при установившемся режиме.

