ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 19.07.2024
Просмотров: 417
Скачиваний: 1

СОДЕРЖАНИЕ
1. Основные понятия и определения
Глава 2. Первичные преобразователи
6. Фотоэлектрические первичные
Глава 3. Усилители и стабилизаторы
Глава 4. Переключающие устройства и распределители
Глава 5. Задающие и исполнительные устройства
Глава 6. Общие сведения об измерении и контроле
Глава 8. Контроль давления и разрежения
Глава 9. Контроль расхода, количества и уровня
Глава 12. Автоматическая блокировка и защита в системах управления
Глава 13. Системы автоматического контроля и сигнализации
Глава 14. Системы автоматического
Глава 15. Объекты регулирования и их свойства
Глава 17. Конструкции и характеристики регуляторов
Глава 18. Общая характеристика
Глава 19. Математическое и программное обеспечение микроЭвм
Глава 20. Внешние устройства микроЭвм
Глава 21. Применение микропроцессорных систем
Глава 23. Конструкции промышленных роботов
Глава 25. Роботизация промышленного производства
-
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Управление, сопровождающееся непрерывным контролем, называют регулированием, а параметр, которым необходимо управлять, т. е. регулировать, — регулируемой величиной. Например, если уровень жидкости в закалочном баке снижается, то необходимо увеличивать подачу воды в бак до тех пор, пока уровень не достигнет заданного значения. В данном примере уровень жидкости является регулируемой величиной, а закалочный бак, в котором регулируется уровень, — объектом регулирования. Следовательно, операция поддержания равенства регулируемой величины ее заданному значению является регулированием. Регулирование может осуществляться вручную и автр- матически.
Рассмотрим принцип работы лабораторной нагревательной печи, подключенной к электросети через автотрансформатор. Пусть для измерения температуры в печи установлен термоэлектрический преобразователь (термопара), подключённый к милливольтметру. Лаборант, наблюдая за показаниями милливольтметра, регулирует напряжение на нагревательных элементах печи. Если температура в печи оказывается ниже заданной, он увеличивает напряжение на нагревательных элементах, отчего температура повышается; и наоборот, если температура повышается, то лаборант уменьшает напряжение на нагревательных элементах. Таким образом, лаборант, изменяя напряжение на нагревательных элементах, регулирует температуру. Такое регулирование называют ручным регулированием.
Для автоматизации процесса регулирования необходимо, чтобы какое-либо устройство непрерывно или периодически измеряло значение регулируемой величины, сравнивало с заданным значением и в случае несоответствия с помощью регулирующего органа корректировало технологический процесс, поддерживая заданное значение регулируемой величины. Такое регулирование, при котором управление осуществляется различными устрой-, ствами без вмешательства человека, называют автоматическим регулированием, а совокупность устройств, состоящих из измерительного элемента (первичного преобразователя), исполнительного механизма и регулирующего органа, называют автоматическим регулятором.
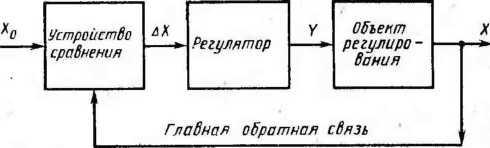
Система автоматического регулирования (рис. 119) представляет собой совокупность отдельных элементов, направленно воздействующих друг на друга. В сравнивающем устройстве происходит сравнение текущего значения регулируемой величины X, которое поступает по главной обратной связи, с ее заданным значением Х0.
Рис.
119. Схема системы автоматического
регулирования

Глава 14. Системы автоматического
РЕГУЛИРОВАНИЯ
В цепи главной обратной связи имеется инвертор, изменяющий знак сигнала X. В случае неравенства величин, поступающих на сравнивающее устройство, т. е. в случае рассогласования, на выходе задающего устройства появляется сигнал АХ =
-
Х0 — X, пропорциональный рассогласованию. Этот сигнал подается на вход регулятора. В регуляторе сигнал АХ преобразуется и усиливается по мощности до уровня, необходимого для управления исполнительным устройством. Исполнительное устройство в свою очередь воздействует на объект регулирования. При этом регулируемая величина X в результате регулирующего воздействия У изменяется в сторону уменьшения отклонения АХ.
Рассмотрим несколько подробнее основные элементы системы автоматического регулирования.
Для установления текущего значения регулируемой величины X в системе имеются специальные элементы получения информации, которые называются измерительными элементами. Основная функция измерительного элемента — измерение регулируемой величины (температуры, давления, запыленности и т. п.) и ее преобразование в электрический, пневматический или гидравлический сигналы, удобные для подачи последующим элементам системы. Измерительными элементами, как правило, являются первичные преобразователи аналогового или дискретного действия.
Сигналы задающих органов (органов настройки), как и выходные величины измерительных элементов, могут иметь различную физическую природу. В связи с этим задающие органы могут быть электрическими, механическими, пневматическими и т. п. В, электрических регуляторах, где выходным является электрический сигнал, задающие органы выполняются в виде резисторов, реостатов или потенциометров. В механических, гидравлических и пневматических регуляторах задающие органы выполняются в виде винтов, пружин или неподвижных опор.
Элементы сравнения могут иметь различные схемы, определяемые природой сравниваемых сигналов. Например, при сравнении электрических сигналов используются такие элементы, как резисторы, конденсаторы и другие элементы, а при сравнении меха
нических величин — рычажные устройства. Заметим, что сигнал рассогласования характеризуется не только величиной, но и знаком.
В большинстве регуляторов сигнал рассогласования обладает небольшой мощностью, и поэтому его усиливают до значения, позволяющего управлять или приводить в действие исполнительный механизм.
Усиление сигнала, осуществляемое в усилительных элементах,
достигается изменением потока вспомогательной энергии, поступающей от усилителя к исполнительному механизму в соответствии со знаком и значением рассогласования.
Элементы автоматических устройств, использующие информацию о сигнале рассогласования (исполнительные элементы), предназначены для оказания регулирующего воздействия на объект регулирования с целью уменьшить рассогласования между текущими и заданными значениями регулируемой величины. В одних случаях это приводит к изменению потока энергии или топлива к регулируемому объекту (печи), в других — к изменению потока жидкости (закалочные баки), пара, воздуха, газа и т. п. Исполнительные элементы состоят из исполнительных механизмов и регулирующих органов.
Для улучшения характера переходных процессов системы автоматического регулирования и повышения качества регулирования в систему регулирования могут вводиться стабилизирующие элементы (дополнительная обратная связь). Введение этих элементов обусловлено тем, что регулируемая величина обычно не сразу достигает заданного значения, и, если не принимать специальных мер, регулирование затягивается, сопровождаясь колебаниями регулируемой величины относительно заданного значения. В отличие от главной обратной связи, которая связывает регулируемую величину с задающим устройством, дополнительные обратные связи передают воздействия с выхода какого- либо звена системы автоматического регулирования на вход любого предыдущего звена. Сигнал дополнительной обратной связи, подаваемый на вход, может либо складываться с входным сигналом (положительная дополнительная обратная связь), либо вычитаться из входного сигнала (отрицательная дополнительная обратная связь). В системах автоматического регулирования чаще всего используют отрицательную дополнительную связь.
В зависимости от характера воздействия дополнительная обратная связь подразделяется на жесткую и гибкую. Жесткая дополнительная обратная связь характеризуется передачей по ней на вход части полной выходной величины на протяжении всего времени регулирования.
Гибкая (упругая) дополнительная обратная связь (изодром) характеризуется передачей по ней на вход первой или второй производной от измерения выходной величины по времени. У гибкой дополнительной обратной связи сигнал на выходе суще-
ствует только тогда, когда сигнал изменяется во времени. Таким образом, гибкая дополнительная обратная связь позволяет осуществлять регулирование входной величины по скорости и уско
2. ОБЫКНОВЕННЫЕ СИСТЕМЫ РЕГУЛИРОВАНИЯ
рению и тем самым значительно ускоряет процесс регулирования и улучшает его качество. Гибкая обратная связь начинает действовать только при изменении выходной величины, и ее действие прекращается после возвращения системы к установившемуся состоянию. В связи с этим иногда ее называют «исчезающей» обратной связью.
Системы автоматического регулирования могут основываться на трех принципах: регулирования по отклонению, регулирования по возмущению и комбинированном принципе регулирования, когда совмещаются принципы регулирования по отклонению и возмущению.
Принцип регулирования по отклонению заключается в том, что процесс регулирования осуществляется по значению регулируемой величины, которое сравнивается с заданным ее значением. При наличии сигнала рассогласования регулятор воздействует на объект, чтобы привести к равновесию регулируемую и заданные величины.
Принцип регулирования по возмущению состоит в том, что из нескольких возмущений, воздействующих на объект, выбирается одно и определяется его влияние на регулируемую величину. Возмущение воздействует с помощью управляющего устройства на регулирующий орган объекта управления. В системах регулирования по возмущению вместо измерения рассогласования в измерительном элементе регулятора измеряется возмущение. Недостатком подобной системы является то, что она компенсирует влияние только одного основного возмущения и не может предотвратить влияние на регулируемую величину других возмущающих воздействий, чаще всего неконтролируемых.
Комбинированные системы сочетают в себе оба рассмотренных принципа.
Системы автоматического регулирования классифицируются по разным признакам.
По виду применяемой энергии — электрические, пневматические, гидравлические и механические.
По виду структуры — обыкновенные и самонастраивающиеся.
По виду функциональной связи между входными и выходными величинами элементов, входящих в системы автоматического регулирования, последние делят на системы непрерывного и прерывистого действия. В системах непрерывного действия непрерывному изменению входных величин всех элементов соответствует непрерывное изменение выходных величин этих элементов.