ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 19.07.2024
Просмотров: 257
Скачиваний: 1

СОДЕРЖАНИЕ
1. Основные понятия и определения
Глава 2. Первичные преобразователи
6. Фотоэлектрические первичные
Глава 3. Усилители и стабилизаторы
Глава 4. Переключающие устройства и распределители
Глава 5. Задающие и исполнительные устройства
Глава 6. Общие сведения об измерении и контроле
Глава 8. Контроль давления и разрежения
Глава 9. Контроль расхода, количества и уровня
Глава 12. Автоматическая блокировка и защита в системах управления
Глава 13. Системы автоматического контроля и сигнализации
Глава 14. Системы автоматического
Глава 15. Объекты регулирования и их свойства
Глава 17. Конструкции и характеристики регуляторов
Глава 18. Общая характеристика
Глава 19. Математическое и программное обеспечение микроЭвм
Глава 20. Внешние устройства микроЭвм
Глава 21. Применение микропроцессорных систем
Глава 23. Конструкции промышленных роботов
Глава 25. Роботизация промышленного производства
-
Потенциометрические первичные
ПРЕОБРАЗОВАТЕЛИ
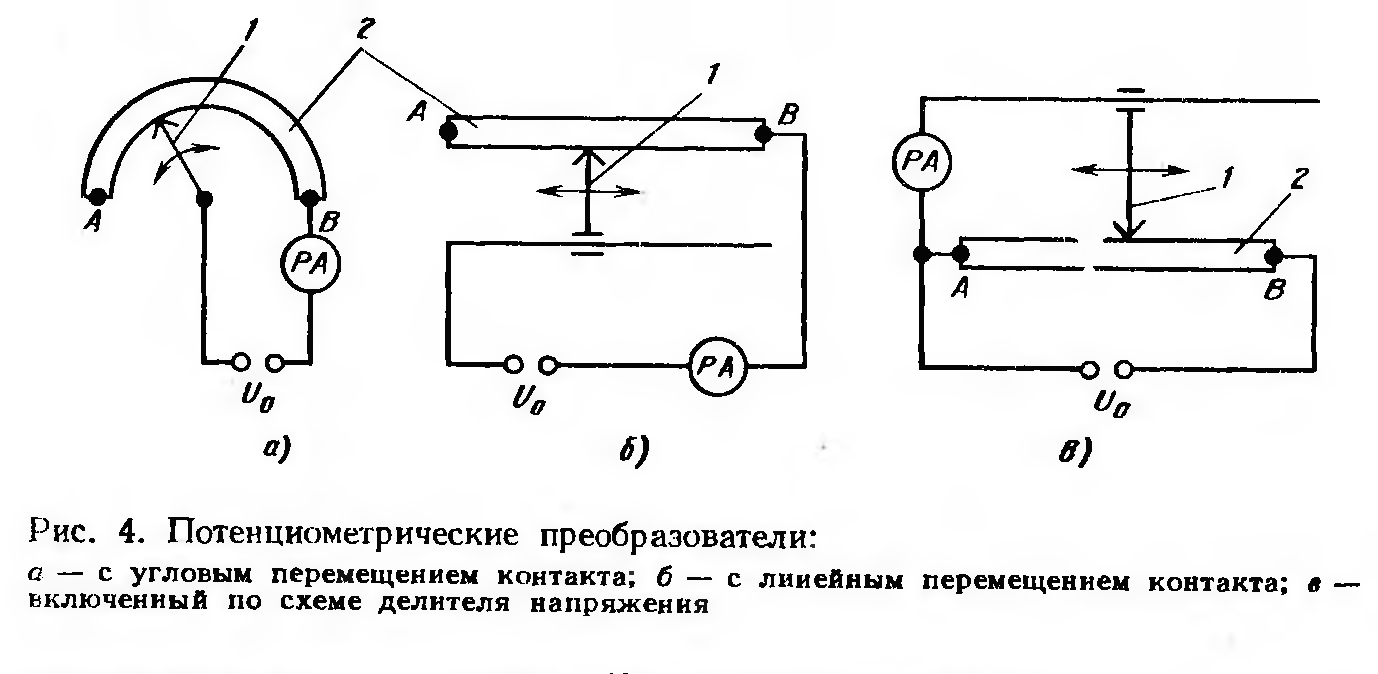
Потенциометрический преобразователь преобразует перемещение чувствительного элемента (подвижного контакта) в постоянный или переменный ток вследствие изменения своего элек-
 трического
сопротивления. Различают преобразователи
с угловым (рис. 4, а)
и линейным (рис 4, б) перемещением
подвижного контакта. Потенциометрический
преобразователь состоит из реохорда
2
и подвижного контакта 1.
При различных положениях подвижного
контакта сопротивление между ним и
точкой В
изменяется, что вызывает изменение
напряжения (У0, подаваемого от
источника питания на клеммы измерительного
прибора.
трического
сопротивления. Различают преобразователи
с угловым (рис. 4, а)
и линейным (рис 4, б) перемещением
подвижного контакта. Потенциометрический
преобразователь состоит из реохорда
2
и подвижного контакта 1.
При различных положениях подвижного
контакта сопротивление между ним и
точкой В
изменяется, что вызывает изменение
напряжения (У0, подаваемого от
источника питания на клеммы измерительного
прибора.
Реохорд датчика представляет собой каркас из изоляционного материала с намотанным на него в один ряд проводом. Для намотки используют проволоку без изоляции из константана, нихрома, фехраля и других сплавов с высоким омическим сопротивлением. По поверхности намотки скользит подвижный контакт.
В зависимости от конструкции реохорда различают два типа потенциометрических преобразователей: линейные и функциональные.
Линейные потенциометрические преобразователи имеют постоянные сечения каркаса, диаметр проволоки и шаг намотки.
Напряжение питания и длина намотки являются постоянными величинами, поэтому выходные напряжения прямо пропорциональны значению перемещения подвижного контакта.
Функциональные потенциометрические преобразователи обладают нелинейной характеристикой, что обеспечивается намоткой проволоки на каркасы с переменным сечением. Такой преобразователь представляет собой как бы несколько включенных последовательно линейных преобразователей. Нелинейность характеристики может быть достигнута также путем шунтирования резисторами отдельных участков намотки линейных потенциометрических преобразователей. Если у линейного потенциометрического преобразователя сделать отвод от середины обмотки, то он будет характеризовать наряду со значением перемещения движка и его направление.
Потенциометрические преобразователи деогут включаться по схеме реостата (рис. 4, а и б) или потенциометра (рис. 4, в) (делителя напряжения). В зависимости от схемы включения перемещение подвижного контакта преобразуется в изменение тока (при последовательном соединении) или напряжения (при включении по схеме делителя). Первая схема применяется довольно редко, так как она не обеспечивает достаточной точности преобразования, на величину которой оказывают влияние сопротивление соединительных проводов и переходного сопротивления между контактом и обмоткой реохорда.
Потенциометрические преобразователи выполняют с 20 %-ной или 100 %-ной зоной пропорциональности. Последние получили большее распространение, так как они охватывают всю шкалу измерительного прибора.
К недостаткам потенциометрических преобразователей можно отнести наличие подвижного контакта и трудности получения линейной характеристики. Однако простота конструкции и возможность отказа от усилителя компенсируют отмеченные недостатки. Потенциометрические преобразователи получили широкое распространение в схемах автоматики для преобразования механических перемещений. В литейном производстве они могут быть использованы для определения высоты встряхивания на встряхивающих формовочных машинах.
-
Индуктивные первичные преобразователи
Индуктивные преобразователи применяют для преобразования малых линейных или угловых перемещений в электрические сигналы. Принцип их действия основан на зависимости индуктивного сопротивления катушки от изменения зазора в магнито проводе, от перемещения магнито провода в катушке или от изменения площади зазора.
Индуктивный преобразователь с подвижным якорем (изменяющимся зазором) представляет собой катушку индуктивности 3 с магнитопроводом 2 и подвижным якорем / (рис. 5, а). Катушка индуктивности с магнитопроводом, называемая статором, закрепляется неподвижно, а якорь механически соединяется с подвижной частью объекта управления, перемещение которого необходимо преобразовать в электрический сигнал. Перемещение якоря изменяет воздушный зазор 6 (входная величина преобразователя), вызывает изменение индуктивного сопротивления катушки и, как следствие этого, выходной величины тока I при постоянном напряжении и0.
Чувствительность индуктивных преобразователей с изменяющимся воздушным зазором уменьшается с увеличением зазора 6, поэтому их используют для измерения и контроля очень малых перемещений (до 2 мм). В таком диапазоне рабочих перемещений их чувствительность не превышает 2 мкм.
Индуктивные преобразователи с перемещающимся магнитопроводом (рис. 5, б) способны измерять большие перемещения (до 50 мм).
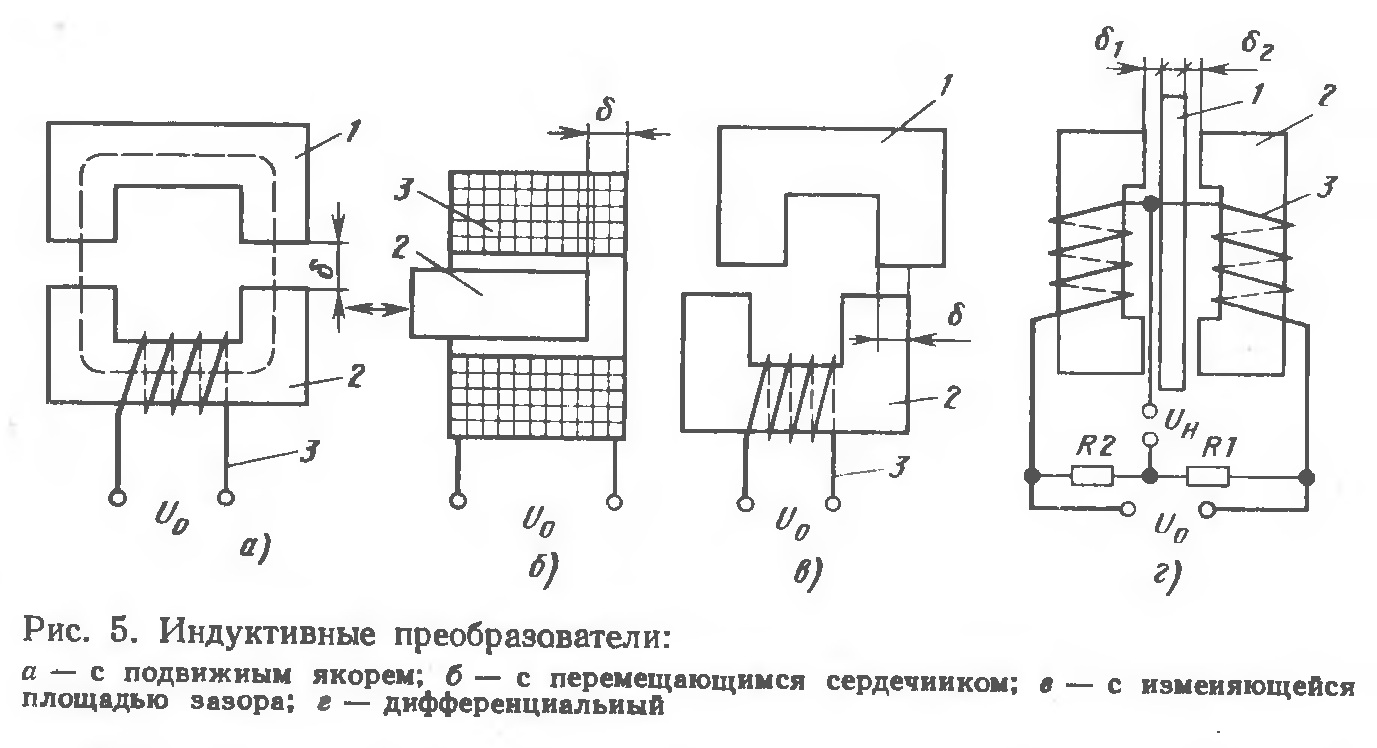
У индуктивных преобразователей с изменяющейся площадью воздушного зазора (рис. 5, в) статическая характеристика линейна только на определенном участке. Линейность нарушается, когда активное сопротивление становится сравнимым с индуктивным. Диапазоны перемещения якоря больше (до 8 мм), чем у преобразователей с изменяющимся воздушным зазором, однако чувствительность ниже.
Все перечисленные выше виды индуктивных преобразователей обладают высокой надежностью, имеют практически неограниченный срок службы и большую мощность выходного сигнала (до нескольких ватт). К недостаткам можно отнести нереверсив- ность статической характеристики, небольшой диапазон перемещения якоря, наличие тока холостого хода и влияние колебаний амплитуды и частоты напряжения питания. Эти недостатки практически полностью отсутствуют у дифференциальных индуктивных преобразователей.
Дифференциальный индуктивный преобразователь (рис. 5, г) имеет два статора 2 с катушками индуктивности 3 и один подвижный якорь 1. При отклонении якоря от среднего положения происходит изменение индуктивного сопротивления обеих катушек и на выходе преобразователя появляется напряжение С/и. Катушки индуктивности включаются либо в дифференциальную измерительную схему, либо как смежные плечи мостовой измерительной схемы.
Дифференциальные индуктивные преобразователи по сравнению с ранее рассмотренными конструкциями обладают более высокими точностью и чувствительностью. Их статическая характеристика линейна и реверсивная. Поэтому они получили наибольшее распространение.
Трансформаторные преобразователи являются разновидностью индуктивных. Они представляют собой трансформаторы с переменным коэффициентом трансформации за счет изменения коэффициента взаимоиндуктивности между обмотками. Трансформаторные преобразователи применяют для преобразования небольших линейных и угловых перемещений в электрический сигнал (напряжение переменного тока).
Первичная обмотка 2 (рис. 6) дифференциального трансформаторного преобразователя с угловым перемещением якоря намотана на центральном стержне 1 магнитопровода, а две совершенно одинаковые вторичные обмотки 3 располагаются на крайних стержнях. Они соединены последовательно и имеют встречную намотку. При симметричном положении якоря 4 по отношению к стержню 1 во вторичных обмотках будут индуцироваться одинаковые по значению и противоположные по фазе ЭДС, а напряжение на выходе преобразователя будет равно нулю. При повороте якоря, механически связанного с подвижной частью объекта управления, изменяется значение магнитных потоков и в соответствии с этим значение ЭДС, т. е. на выходе появляется напряжение, амплитуда которого равна разности амплитуд ЭДС вторичных обмоток. Статическая характеристика рассмотренного преобразователя линейна и реверсивна. Реверсивность означает изменение в знаке выходного сигнала при изменении знака входного сигнала. Чувствительность преобразователя в 2 раза выше чувствительности обычных индуктивных преобразователей.
Интересна конструкция ферродинамического преобразователя, предназначенного для преобразования угловых перемещений в электрические сигналы.
Ферродинамический преобразователь (рис. 7) имеет магнито- провод, состоящий из плунжера /, шихтованного ярма 2 и сердечника 3. На сердечнике 3 укреплены агатовые подпятники (на схеме не показаны), в которых на кернах установлена поворотная рамка 4, механически соединенная с подвижной частью объекта
Рис.
6. Дифференциальный трансфор- Рис.
7 Ферродинамический преобра-
маторный
преобразователь зователь

управления. Концы обмотки подвижной рамки подсоединяются с помощью спиральных пружин и проводов. Принцип работы преобразователя заключается в следующем. При подаче переменного тока на обмотку возбуждения 5 в магнитопроводе возникает магнитный поток. Если рамка 4 расположена по нейтрали ММ, то значение наведенной ЭДС равно нулю. При повороте рамки на некоторый угол а в ней индуцируется ЭДС, величина которой пропорциональна углу поворота. Рабочий угол рамки от нейтрали составляет 40°. В зависимости от типа преобразователя напряжение на выходе рамки изменяется от —1 до +1 В или от 0 до 2 В.
Высокочастотные индуктивные преобразователи позволяют измерить толщину фольги металлов, толщину гальванических покрытий, разностенность металлических труб и т. д. Принцип их действия основан на изменении индуктивности обмотки при возникновении вихревых токов в проводящем теле, расположенном вблизи этой обмотки.
В таких преобразователях используется так называемый поверхностный эффект, т. е. затухание вихревых токов по мере проникновения их в глубь проводящей среды, обусловленных переменным магнитным полем; при этом разность токов возбуждающего поля и поля вихревых токов уменьшается.

