ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 19.07.2024
Просмотров: 337
Скачиваний: 2

СОДЕРЖАНИЕ
Глава 2. Первичные преобразователи
Глава 3. Усилители и стабилизаторы
Глава 4. Переключающие устройства и распределители
Глава 5. Задающие и исполнительные устройства
Глава 6. Общие сведения об измерении и контроле
Глава 8. Контроль давления и разрежения
Глава 9. Контроль расхода, количества и уровня
Глава 12. Автоматическая блокировка и защита в системах управления
Глава 13. Системы автоматического контроля и сигнализации
Глава 14. Системы автоматического
Глава 15. Объекты регулирования и их свойства
Глава 17. Конструкции и характеристики регуляторов
Глава 18. Общая характеристика
Глава 19. Математическое и программное обеспечение микроЭвм
Глава 20. Внешние устройства микроЭвм
Глава 21. Применение микропроцессорных систем
Глава 23. Конструкции промышленных роботов
Глава 25. Роботизация промышленного производства
Шаговым искателем называют электромагнитный импульсный переключатель, предназначенный для поочередной коммутации большого числа контактных групп. Он (рис. 31) состоит из неподвижного контактного поля контактов -1, расположенных в несколько
рядов и изолированных дріуг от друга, ротора со щетками 5 и электромагнитного привода. Электромагнитный привод содержит храповое колесо 4, собачку 5, якорь 6, возвратную пружину 7 и электромагнит 8. Каждый контактный ряд имеет свою щетку, соединенную через скользящий контакт 2 с выводом.
-
При подаче управляющего сигнала на обмотку электромагнита 8 якорь 6 притягивается к магнитопроводу, и собачка 5 толкает зуб храпового колеса 4, жестко соединенного с ротором, на котором установлены щетки. Ротор поворачивается и переводит
щетки по неподвижным контактам. После снятия управляющего сигнала пружина 7 возвращает якорь в исходное положение.
Шаговые искатели различают: по емкости контактного поля, т. е. по числу пластин в ряду и числу неподвижных контактов; по характеру движения щеток (шаговые искатели бывают вращательные — ШИ, реверсивные — РШИ и подъемно-вращательные — ДШИ); по способу приведения щеток в движение; с приводом прямого действия (рабочее движение ротора происходит при притяжении якоря электромагнита) и обратного действия (движение ротора происходит при отпускании якоря под действием возвратной пружины).
Использование шаговых искателей для построения схем управления механизмами в литейных и термических цехах значительно упрощает эти схемы и увеличивает их надежность.
Под командоаппаратом понимается прибор, который автоматически подает импульсы (команды) для проведения технологических процессов по заранее установленному графику.
Командоаппарат состоит из следующих основных узлов: барабана, контактной рейки и плиты. Барабан представляет собой центральный вал на двух опорных подшипниках. На валу насажены переключающие шайбы, на которых закрепляются выключающие и включающие кулачки.
Схема действия одной контактной шайбы показана на рис. 32.
Контактная шайба с двумя кулачками, расположенными с двух сторон, жестко крепится на центральном валу 1. При вращении вала включающий кулачок 9 подходит к ролику 8 и, нажимая
на него, поворачивает контактный рычаг 4, преодолевая сопротивление возвратной пружины 7. Контактный мостик 3 замыкает цепь. Одновременно отключающий рычаг 6 под действием пружины параллельно входит в вырез контактного рычага и удерживает его во включенном состоянии. При дальнейшем вращении шайбы отключающий кулачок 2 подходит к ролику 5 отключающего рычага 6 и нажимает на него. При этом отключающий рычаг освобождает контактный рычаг 4, который, поворачиваясь вокруг своей оси под действием возвратной пружины 7, мгновенно размыкает контакты. Для изменения длительности времени за- мкнутого состояния контактов, а также изменения момента включения кулачки 2 и 9 можно переставлять по окружности шайбы, для чего на шайбе имеются отверстия.
Кулачковые командоаппараты различают по числу барабанов (один или два) и по числу переключающих шайб (от 2
до 24).
Кулачковые командоаппараты предназначены для коммутации тока в цепях управления и применяется в автоматизированных электроприводах в качестве путевых или конечных выключателей. Контакты командоаппаратов допускают длительную нагрузку током 16 А и кратковременную (до 10 с) током 75 А.
Рис.
32. Схема действия одной контактной
шайбы командоапарата
Рис.
31. Шаговый искатель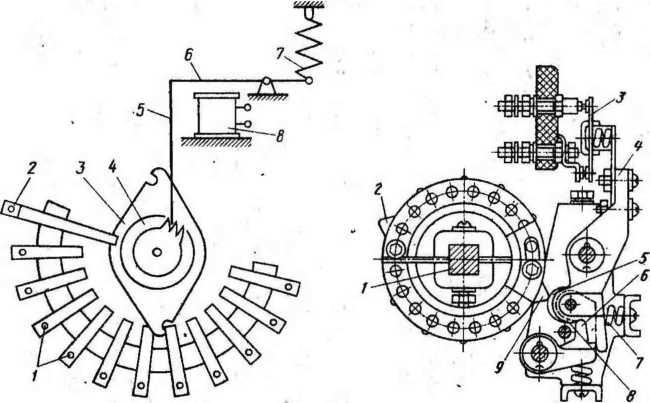
Различают контакторы постоянного и переменного тока. Контакторы постоянного тока имеют, как правило, одну пару главных контактов, а контакторы переменного тока — три пары. Контакторы различаются: по конструкции электромагнита — с якорем клапанного типа и прямоходовым якорем; по способу гашения дуги — с магнитным гашением и дугогасительной решеткой; по допустимому числу срабатывания в час — от 240 до 1200 срабатываний.
Рис.
33. Конструктивная схема контактора
переменного тока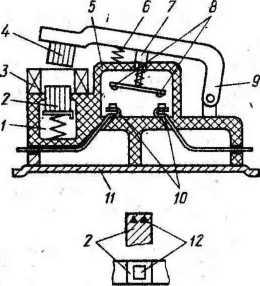
Контактор переменного тока с якорем клапанного типа показан на рис. 33. На металлическом основании 11 расположена контактная, дугогасительная, подвижная и электромагнитная системы. Принцип действия контактора состоит В *гом, что при подаче напряжения на катушку 3 тягового электромагнита якорь 4 притягивается к магнитопроводу 2, опирающемуся на демпфирующую пружину 1, н траверса 9 поворачивается. При этом подвижные контакты 8 замыкаются с неподвижным 10. Необходимое нажатие подвижных контактов обеспечивается пружиной 7. Катушка электромагнита питается переменным током, вследствие чего магнитный поток в электромагнитной системе контактора проходит через нуль. Это обстоятельство вызывает вибрацию и гудение магнитной системы. Для ослабления этих явлений на торце магнитопривода 2 закладывается медный короткозамкнутый виток 12. В момент, когда магнитный поток проходит через магии* топровод, в короткозамкнутом витке наводится ЭДС, как во вторичной обмотке трансформатора. Через виток проходит ток, который создает дополнительный магнитный поток, препятствующий отпадению якоря при переходе основного потока через нуль.
При снятии напряжения с катушки 3 пpoиcxoдиt отключение контактора. Прй этом траверса под действием собственного вес^ и возвратной пружины 6 приходит в «нормальное» положение. Возникающая прй расхождении главных контактов дуга от протекающего тока быстро гасится в дугогасительной камере 5.
Все контакторы переменного и постоянного тока должны надежно работать при колебаниях напряжения от 85 до 105 %.
Контакторы постоянного тока применяют в термических и литейных цехах для включения и выключения высокочастотных индукционных установок термических и плавильных печей, имеющих индуктивную нагрузку.
Контакторы переменного тока применяют для включения и выключения мощных термических и плавильных печей, а также различных установок с активной индукционной нагрузкой (индукционные нагревательные и плавильные печи).
Магнитные пускатели — это комплексные индукционные аппараты, предназначенные для пуска, отключения и защиты электродвигателей от перегрузок без выведения или введения в их силовые цепи резисторов. Реверсивный пускатель состоит из двух, а нереверсивный — из одного контактора и двух тепловых реле, смонтированных на общем основании или в общей защитной оболочке. Наибольшее распространение получили пускатели серий Г1МЕ, ПАЕ и Г1А.
-
БЕСКОНТАКТНЫЕ УСТРОЙСТВА УПРАВЛЕНИЯ
В предыдущих параграфах рассматривались аппараты управления дискретного действия (реле, кнопки управления, контакторы и др.). Эти аппараты обладают целым рядом недостатков: подвижные части прн частом включении сравнительно недолговечны, что вызывает большое число отказов и сбоев в работе. Их время срабатывания заметно влияет на быстродействие всей схемы автоматики, они требуют профилактических осмотров, регулировок илн частой замены. В настоящее время наряду с контактными аппаратами используются бесконтактные устройства, обладающие высокими надежностью и быстродействием.
Как правило, бесконтактные устройства не имеют подвижных частей. В процессе работы их электрические цепи не разрываются (отсюда и название «бесконтактные»), а сигналы управления возникают вследствие дискретного изменения параметров составляющих элементов, с нелинейными статическими характеристиками (транзисторы, диоды и т. п.). Эти аппараты управления — транзисторные и магнитные логические элементы и схемы с тиристорами. Бесконтактные устройства более надежны, чем контактные электромеханические аппараты, имеют высокое быстродействие, но более чувствительны к внешним электрическим помехам и воздействию температуры. Влияние указанных недостатков можно значительно снизить правильным построением схем бесконтактных устройств.
Бесконтактные устройства, как и контактные аппараты, обладают дискретным действием, т. е. характеризуются двумя состояниями, соответствующими понятиям «включено» и «выключено». Под состоянием «включено» у бесконтактных устройств понимается состояние, когда на их выходе имеются сигналы с требуемыми параметрами (напряжением или током). Отсутствие напряжения и тока на выходе соответствует состоянию «выключено».
Наиболее распространены в схемах управления логические элементы, на основе которых строится логическая часть системы управления, где в зависимости от входных сигналов появляются соответствующие выходные. Выходные сигналы через усилители поступают на исполнительные устройства.
Бесконтактные схемы могут быть собраны с помощью логических элементов, выполняющих элементарные логические функции И, ИЛИ, НЕ, ПАМЯТЬ, ПОВТОРИТЕЛЬ, ВРЕМЯ или ЗАДЕРЖКА. Бесконтактные логические элементы системы управления выполняют определенный объем смысловых логических операций, но соединять или разрывать какие-либо схемы они не могут. Поэтому применение бесконтактных устройств путем прямой замены контактных аппаратов невозможно.
По сравнению с релейно-контактными схемами число бесконтактных элементов в бесконтактных схемах в несколько раз больше, чем реле.
Бесконтактные элементы классифицируют по виду выполняемой функции. Сложные функции раскладываются в ряд простых, реализуемых с помощью простых элементов, которые осуществляют элементарные функции. Название некоторых элементарных логических функций и элементов, их функции, обозначения, формулы и релейные эквиваленты приведены в табл. 1.
В устройствах автоматики, телемеханики, в системах контроля, сигнализации, измерений и защиты находят широкое применение логические элементы: матричные серин «Логика-М», интегральные серии «Логика-И» и транзисторные серии «Логика-Т». Каждая серия унифицированной системы «Логика» состоит из нескольких типов элементов, выполняющих различные логические и вспомогательные функции. Например, серия «Логика-И» содержит семь логических элементов, при помощи которых можно реализовать различные логические функции.
Логические элементы серии «Логика-Т» изготовляют в виде модулей: транзисторы, диоды, резисторы и другие детали монтируют на гетинаксовых печатных платах, которые размещают затем в пластмассовом корпусе размером 90x19,5x55 мм и заливают компаундом на основе эпоксидной смолы.
Серия «Логика-И» состоит из четырех групп элементов: логических, функциональных, времени и выходных (усилителей). Всего имеется 30 различных элементов. Напряжение питания всех элементов 15 В. Габаритные размеры 70x70x24 мм.
Изображение схем управления с бесконтактными элементами отличается от изображения схем с контактными аппаратами. Электромеханические реле и контакторы обычно имеют одну входную цепь и несколько выходных цепей в виде замыкающих и размыкающих контактов. Бесконтактные элементы имеют несколько входных цепей и только одну или две выходных цепи. Поэтому в релейно-контактных схемах нельзя механически заменить контакты бесконтактными элементами.
Таблица 1
Наименование н обозначение логических функций н элементов
![]()
Релейный
эквивалент
Наименование логической функции (элемента)
Содержание логической функции
Обозначение
элемента
Х1
Х2
VI
У2
XI
Х2
Х1
XI
и
(конъюнк-
тор)
ИЛИ
(дизъюнк-
тор)
НЕ
(инвертор,
отрицание)
ПАМЯТЬ
(двоичный
прибор)
ПОВТО
РЕНИЕ
(повтори
тель)
ЗАДЕРЖКА
(выдержка
времени)
Сигнал иа выходе появляется только при наличии всех сигналов иа входе
Сигнал на выходе появляется тогда, когда имеется сигнал хотя бы на одном из входов
При наличии сигнала на входе сигнал на выходе отсутствует, и наоборот
При подаче сигнала на вход, т. е. включения XI, выходной сигнал К сохраняется до подачи сигнала иа вход Х2 (отключение памяти) независимо от последующего состояния входа XI
Сигнал иа выходе появляется при наличии сигнала на входе
Сигнал на выходе появляется через некоторое время после подачи сигнала на вход и исчезает одновременно с входным сигналом
Л

