ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 19.07.2024
Просмотров: 406
Скачиваний: 3

СОДЕРЖАНИЕ
Глава 2. Первичные преобразователи
Глава 3. Усилители и стабилизаторы
Глава 4. Переключающие устройства и распределители
Глава 5. Задающие и исполнительные устройства
Глава 6. Общие сведения об измерении и контроле
Глава 8. Контроль давления и разрежения
Глава 9. Контроль расхода, количества и уровня
Глава 12. Автоматическая блокировка и защита в системах управления
Глава 13. Системы автоматического контроля и сигнализации
Глава 14. Системы автоматического
Глава 15. Объекты регулирования и их свойства
Глава 17. Конструкции и характеристики регуляторов
Глава 18. Общая характеристика
Глава 19. Математическое и программное обеспечение микроЭвм
Глава 20. Внешние устройства микроЭвм
Глава 21. Применение микропроцессорных систем
Глава 23. Конструкции промышленных роботов
Глава 25. Роботизация промышленного производства
Лабораторная работа 2. Измерение параметров электромагнитных реле
Содержание работы. Изучить устройство, принцип действия и технические характеристики электромагнитных реле. Ознакомиться со способами изменения выдержки времени различных реле. Определить параметры срабатывания и отпускания. Установить .минимально и максимально возможные выдержки реле времени.
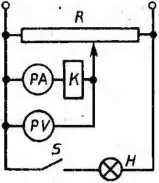
Рис. 35. Схема исследования электромагнитных реле
Описание лабораторной установки. Лабораторная установка представляет собой стенд с закрепленными на нем набором различных электромагнитных реле, электросекундомером, миллиамперметром и вольтметром.
Порядок выполнения работы. 1. Собрать схему, изображенную на рис. 35. 2. Изменяя потенциометром Я напряжение на обмотке реле К, определить ток и напряжение его срабатывания в момент загорания лампы Н. 3. Уменьшая потенциометром Я напряжение на реле, определить силу тока и напряжение отпускания реле в момент погасания лампы Н. 4. Измерения повторить 3 раза и по результатам вычислить среднее значение параметров. 5. Измерить выдержки времени посредством электросекундомера, включенного в схему совместно с реле так, чтобы выполнялось условие одновременной остановки секундомера после замыкания и размыкания контактов реле.
Содержание отчета. Отчет должен содержать схемы испытаний реле, краткое описание лабораторной установки, принцип действия реле и способы регулирования выдержки времени, результаты испытаний и технические характеристики реле и приборов.
Глава 5. Задающие и исполнительные устройства
-
КЛАССИФИКАЦИЯ ЗАДАЮЩИХ И ИСПОЛНИТЕЛЬНЫХ
УСТРОЙСТВ
Задающие устройства предназначены для задания требуемого значения регулируемого (управляемого) параметра. По виду вырабатываемых сигналов задающие устройства подразделяют на два основных класса: аналоговые и цифровые. Аналоговые в свою очередь делят на непрерывные и дискретные, при этом дискретность может осуществляться как во времени, так и по значению вырабатываемого сигнала. Цифровые задающие устройства формируют только сигналы дискретных уровней.
Существенным признаком классификации является род энергии вырабатываемых сигналов. В соответствии с этим признаком различают задающие устройства с электрическими, пневматическими, гидравлическими и механическими (в виде перемещений и усилий) сигналами. Для своей работы задающие устройства потребляют энергию от внешнего источника, вид которой может не совпадать с видом энергии сигнала. Так, например, в регуляторах прямого действия задающие устройства обычно вырабатывают механические сигналы, а для своей работы потребляют электрическую энергию.
Одним из важнейших признаков задающих устройств является вид носителя программы. В задающих устройствах непрерывного действия наиболее часто для этих целей используют кулачковые и рычажные механизмы, функциональные потенциометры и бумажную диаграмму. В задающих устройствах дискретного действия находят применение многоцепные переключатели, перфокарты и перфоленты, магнитная пленка и кинопленка.
Исполнительное устройство является промежуточным преобразователем, состоящим из двух самостоятельных узлов: исполнительного механизма и регулирующего (управляющего) органа.
Исполнительные механизмы предназначены для воздействия через регулирующий орган или непосредственно на объект управления. В исполнительный механизм входят двигатель и передаточное устройство. Основными параметрами, характеризующими работу исполнительных механизмов, являются усилие на выходе механизма, коэффициент усиления по мощности, линейное или угловое перемещение, частота вращения, быстродействие и т. п.
В зависимости от управляющего воздействия на выходе различают два вида исполнительных механизмов: силовые и параметрические.

Если исполнительные механизмы создают управляющее воздействие на регулирующий орган в виде силы или момента, то такие механизмы называют силовыми. К этой группе относятся электромагниты, электромеханические муфты, различного вида двигатели. Если изменение состояния регулирующего органа связано с изменением его параметров (сопротивления, магнитного потока, температуры, скорости и т. п.) или параметров подводимой энергии (напряжения, тока, частоты и фазы электрического тока, давления рабочей среды и т. п.), то те же исполнительные механизмы называют параметрическими. Например, в автоматическом термостате исполнительным механизмом является усилитель, нагрузкой которого служит нагревательный элемент (регулирующий орган) термостата. При отклонениях температуры от заданного значения изменяется входное напряжение усилителя, при этом изменится и выходное напряжение, а также ток в нагревательном элементе и температура в термостате. В этом устройстве усилитель совмещает функции элемента усиления и исполнительного механизма.
В зависимости от вида потребляемой энергии различают электрические, гидравлические, пневматические и механические исполнительные механизмы. Наибольшее распространение в системах автоматики получили электрические механизмы.
В зависимости ог характера движения выходного вала исполнительные механизмы делят на три вида: с линейным, поворотным (угол поворота меньше 360°) и вращательным (угол поворота больше 360°) движением.
Регулирующим органом называется устройство (блок исполнительного устройства), которое изменяет расход энергии или вещества и непосредственно влияет на регулируемую величину объекта регулирования. Так, например, с помощью регулирующих органов можно изменять количество хладоносителя, подаваемого в теплообменник холодильной машины, или устанавливать напряжение и силу электрического тока на нагревательных элементах термической печи.
По принципу регулирующего воздействия на объект различают дросселирующие и дозирующие регулирующие органы. Первые представляют собой переменное гидравлическое сопротивление. За счёт изменения проходного сечения дросселирующего устройства регулируется расход вещества. Ко вторым относятся устройства или механизмы, которые регулируют поступление вещества или энергии путем изменения своей производительности.
Наиболее широкое распространение получили дросселирующие регулирующие органы, хотя дозирующие более экономичны.
-
ЗАДАЮЩИЕ УСТРОЙСТВА
Большинство задающих устройств состоит из трех основных элементов: привода, носителя программы и элемента настройки. В зависимости от конструктивного оформления устройства отдельные элементы могут быть функционально совмещены.
Наиболее распространенными приводами задающих устройств непрерывного действия являются синхронные электрические двигатели и часовые механизмы. В качестве носителей программы в задающих устройствах непрерывного действия обычно испольч зуют механические устройства, рычажные механизмы и функциональные потенциометры.
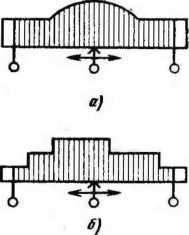
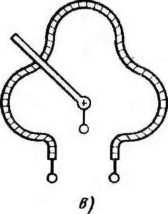
Механическими носителями программы в задающих устройствах непрерывного действия являются кулачковые механизмы различной конструкции. Назначение кулачковых механизмов состоит в преобразовании вращательного движения кулачка или прямолинейного движения кулачковой линейки в качательное или прямолинейное движение щупа толкателя. С точки зрения обеспечения постоянного контакта кулачка со щупом кулачковые механизмы делят на устройства с силовым замыканием, т. е. открытые (рис. 36, а и г), и устройства с кинематическим замыканием (с канавкой), которые называются закрытыми (рис. 36, бив).
Кулачки с силовым замыканием проще в изготовлении и обеспечивают большую точность. Закрытые кулачки целесообразно применять при малой мощности привода, так как из-за отсутствия натяжения пружины уменьшается момент сопротивления. Применение закрытых кулачков целесообразно также при больших
а) б)
Рис. 36. Типы кулачков:
цилиндрический
закрытый; г
перемещениях щупов. Выбор между плоскими и цилиндрическими кулачками определяется только конструктивными соображениями, связанными с общей компоновкой задающего устройства.
Кроме кулачковых механизмов, в качестве механических носителей заданной функции применяют рычажные механизмы, отношение плеч которых используется, например, для установления заданного соотношения расходов в струйном гидравлическом регуляторе.
В электрических программных и следящих регуляторах носители программ, как правило, выполняют в виде функциональных потенциометров.
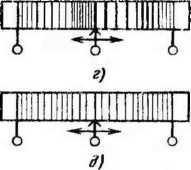
По способу реализации заданной функции потенциометры подразделяют на профильные, ступенчатые (частный случай профильных), с некруглым винтовым каркасом, с переменным шагом намотки, с секциями, выполненными из провода различного сечения, с дополнительными постоянными резисторами, шунтирующие обмотку, имеющую отводы (рис. 37, а—е).
В зависимости от угла поворота движка потенциометры разделяются на три вида: с углом вращения движка менее 360°;
![]()
а — профильный; б — ступенчатый; в — с иекруглым каркасом; г — с переменным шагом намотки; д — с секциями, выполненными из провода различного сечеиия; е — с шунтирующими резисторами
Рис. 37. Функциональные потенциометры:
с углом вращения движка более 360°; с неограниченным углом вращения движка.
Сечение каркаса может быть круглым или плоским (с большим отношением высоты к толщине).
В задающих устройствах по соображениям простоты изготовления, возможности получения необходимой точности и взаимозаменяемости наибольшее распространение получили профильные потенциометры с плоскими каркасами и посекционношунтирован- ные потенциометры с отводами обмотки, выполненной на круглых каркасах.
Погрешность воспроизведения сложных функций для рассмотренных профильных и ступенчатых потенциометров достигает ±2 %.
Всем рассмотренным задающим устройствам непрерывного действия присущи общие недостатки: невозможность изменения программы без выключения регулятора; ограниченное быстродействие; точность задания программы определяется как точностью изготовления деталей, так и точностью их сборки. Перечисленные недостатки отсутствуют у задающих устройств дискретного действия, поэтому они получают в настоящее время все большее распространение.
В качестве привода сменных носителей программ в дискретных задающих устройствах применяют шаговые двигатели различных видов.
Все носители программ дискретных задающих устройств могут быть условно разделены на две категории: сменные и постоянные. К первой категории относятся перфокарты, перфоленты, ленты с нанесенными оптическими метками (использующие как неравномерную прозрачность, так и неравномерную отражательную способность), магнитные ленты и диски (однако два последних носителя при смене не заменяются; стирание старой программы и запись новой равноценны замене). Вторую категорию составляют «схемные» носители программы, представляющие собой многоцепные переключатели, элементы которых связаны между собой в соответствии с заданным алгоритмом функционирования.