Файл: Расчёт характеристик трансформатора и электрических двигателей.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 03.02.2024
Просмотров: 81
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

Пошагово процесс выглядит следующим образом:
-
При запуске двигателя магнитное поле статора пересекается с контуром ротора и индуцирует электродвижущую силу. -
В накоротко замкнутом роторе возникает переменный ток -
Два магнитных поля (статора и ротора) создают крутящий момент. -
Крутящийся ротор пытается «догнать» поле статора. -
В тот момент, когда частоты вращения магнитного поля статора и ротора совпадут, электромагнитные процессы в роторе затухают и крутящий момент становится равным нулю. -
Магнитное поле статора возбуждает контур ротора, который к этому моменту снова отстает.
То есть ротор всегда медленнее магнитного поля статора, что и обеспечивает асинхронность.
Поскольку ток в роторе индуцируется бесконтактно, отпадает необходимость установки скользящих контактов, что делает асинхронные двигатели более надежными и эффективными. Изменяя направление тока в одной из обмоток (для этого нужно поменять фазы на клеммах), вы можете «заставить» мотор вращаться в ту или другую сторону.
Направление электромагнитной силы легко определить, вспомнив школьный курс физики и воспользовавшись «правилом левой руки».
На частоту вращения магнитного поля статора влияет частота питающей сети и число пар полюсов. Поскольку число пар полюсов зависит от типа двигателя и остается неизменным, то, если вы хотите изменить частоту вращения поля, необходимо изменить частоту питающей сети с помощью преобразователя. [8]
На рисунке 3.1.1 показана конструкция AД с коротко замкнутым ротором.
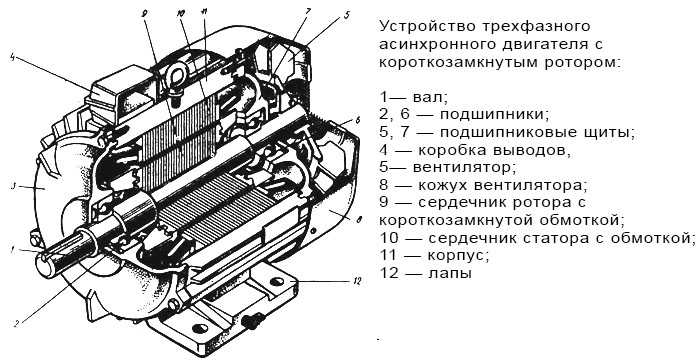
Рисунок 3.1.1 Конструкция АД.
3.1.3 Пуск АД.
Процесс пуска для электродвигателя любого типа является наиболее тяжелым режимом работы. Ударные значения тока и момента в пусковом режиме АД могут достигать в отдельных случаях 10-кратных по отношению к номинальным величинам. В среднем кратность пусковых токов и моментов составляет 5-7 значений номинальных величин. Высокая кратность указанных величин обусловлена в первую очередь особенностями протекания электромагнитных переходных процессов в асинхронном электродвигателе при пуске.
При частых пусках рабочий ресурс электродвигателей значительно сокращается.
Для мощных электродвигателей переменного тока количество пусков без пусковых устройств лимитировано, т. е. через определенное число пусков осуществляется капитальный ремонт с заменой изоляции обмоток.
Ограничение пускового тока возможно:
1.За счет понижения напряжения
2.За счет повышения сопротивлений в статорной и роторной цепях
Основные способы пуска АД:
1.Пуск непосредственным включением в сеть (прямым включением в сеть)
2.Пуск при пониженном напряжении (переключение со схемы соединения обмотки статора «треугольник» на схему «звезда», применением тиристорных преобразователей напряжения)
3.Пуск при ограничении пускового тока (включением токоограничивающих сопротивлений, реакторов и автотрансформаторов)
4.Реостатный пуск АД с фазным ротором
5.Частотный пуск
6.Пуск с применением специальных схем включения АД
Прямой пуск. Пуск двигателя непосредственным включением на напряжение сети обмотки статора называется прямым пуском. При включении рубильника в первый момент скольжение s = l, а приведенный ток в роторе и равный ему ток статора максимальны. По мере разгона ротора скольжение уменьшается и поэтому в конце пуска ток значительно меньше, чем в первый момент. В серийных двигателях при прямом пуске кратность пускового тока 5-7,причем большее значение относится к двигателям большей мощности.
Приведенные данные показывают, что при прямом пуске в сети, питающей двигатель, возникает бросок тока, который может вызвать настолько значительное падение напряжение, что другие двигатели, питающиеся от этой сети, могут остановиться. С другой стороны, из-за небольшого пускового момента при пуске под нагрузкой двигатель может не преодолеть момент сопротивления на валу и не тронется с места. В силу указанных недостатков прямой пуск можно применять только у двигателей малой и средней мощности (примерно до 50 кВт).
Способ пуска асинхронного двигателя переключением со звезды на треугольник, применяется в установках, где нагрузка на валу минимальна или вообще отсутствует. Для того чтобы осуществить данный вид пуска, нужно чтобы основной схемой включения двигателя был треугольник. В начальный момент времени обмотка соединяется по схеме звезда, запускается, происходит разгон до некоторого значения, а затем переключают на треугольник. Таким образом, добиваются уменьшения токов в момент пуска. Но, с уменьшением токов, уменьшаются и моменты, именно поэтому не рекомендуется использовать этот способ для двигателя с нагрузкой на валу. Схема подключения показана на рисунке 3.1.2.

При этом напряжение АД уменьшается в раз, а пусковой ток и пусковой момент понижаются в 3 раза.
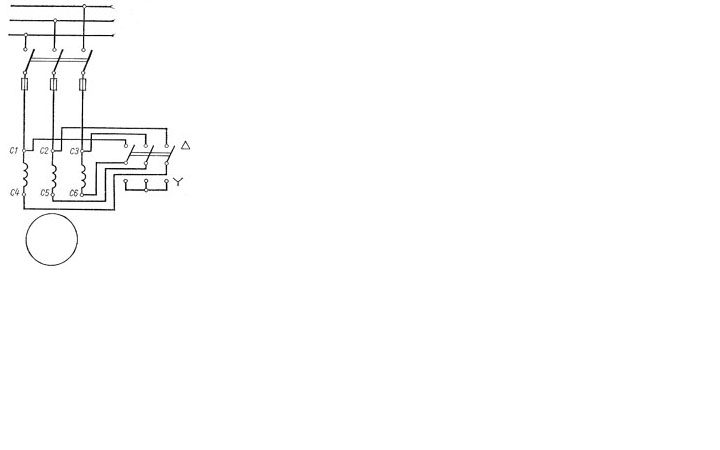
Рисунок 3.1.2 Пуск АД при переключении обмоток статора со схемы «треугольник» на схему «звезда» (на время пуска).
Для улучшения пусковых характеристик АД выполняют реостатное регулирование с фазным ротором. Пуск АД с фазным ротором производят вручную или автоматически.
Ручной пуск осуществляют с помощью пускового реостата. При заданном моменте переходном переход с одной характеристики на другую происходит в момент исключения соответствующей ступени реостата (его сопротивление уменьшается).
При пуске АД сопротивление пускового реостата Rд2 выбирается так, чтобы пусковой ток не превышал допустимого значения и чтобы пусковой момент АД был равен максимальному.
Затем выводится первая ступень пускового реостата и его сопротивление уменьшается до величины Rд1. При этом двигатель переходит на следующую характеристику и т.д. до полного вывода пускового реостата Rд=0.
Введение реостата в цепь ротора позволяет:
1) уменьшить пусковой ток двигателя;
2) увеличить пусковой момент двигателя.
Когда двигатель разгонится до скорости 30-40% номинальной, отключают первую ступень. Двигатель с броском тока продолжает разгоняться, и при скорости 60-70% номинальной отключают вторую ступень. Двигатель после отключения резисторов R и R продолжает разгоняться до номинальной скорости.
Улучшение пусковых характеристик за счет увеличения активного сопротивления ротора используется в короткозамкнутых асинхронных двигателях со специальными обмотками на роторе. Наибольшее применение нашли двигатели с глубокими пазами на роторе и двигатели с двойной клеткой на роторе.
Двигатели с глубокими пазами на роторе. У таких двигателей высота паза ротора в несколько раз больше его ширины. В пазах располагается узкий высокий проводник. Идея улучшения пусковых характеристик в таком двигателе основана на том, что при скольжениях, близких к единице, когда частота тока в роторе примерно равна частоте сети, в этих проводниках будет наблюдаться эффект вытеснения тока, в результате которого активное сопротивление проводника возрастает, а индуктивное уменьшается. Вытеснение тока в проводниках происходит в результате действия потока пазового рассеяния Фσп. Поэтому большая часть тока пройдет по верхним элементам.
По мере разгона двигателя частота тока в роторе уменьшается. Явление вытеснения тока при этом ослабевает и распределение тока по высоте проводника выравнивается. По окончании пуска ток в проводнике распределяется практически равномерно, а активное сопротивление обмотки ротора уменьшается по сравнению с его значением при s=1.
У двигателей с глубоким пазом увеличивается кратность начального пускового момента и уменьшается кратность начального пускового тока.
На рисунке 3.1.3 показаны разновидности пазов, применяемых для двухклеточных роторов двигателей.
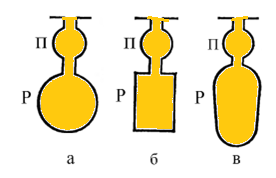
Рисунок 3.1.3 Разновидность пазов.
В верхнюю часть паза, расположенную ближе к зазору и имеющую меньшее поперечное сечение, закладываются проводники одной клетки П, а в нижнюю – другой Р. Кроме того, проводники верхней клетки выполняют из материала с большим удельным сопротивлением (латунь, бронза), чем проводники нижней (медь). Поэтому верхняя клетка имеет большее активное сопротивление, чем нижняя.
Каждая клетка по торцам имеет свои короткозамыкающие кольца.
В первый момент пуска, когда частота тока в роторе f2≈f1, полное сопротивление нижней клетки из-за ее большого индуктивного сопротивления будет значительно выше полного сопротивления верхней клетки. Вследствие этого при одинаковых ЭДС, индуцируемых основным вращающимся полем в проводниках паза ротора, в верхней клетке ток будет больше, чем в нижней. Так как эта клетка имеет большое активное сопротивление, то вращающий момент, создаваемый этим током при пуске, также будет большим.
Двигатели с двойной клеткой применяются в установках с тяжелыми условиями пуска. Однако, как и у двигателя с глубоким пазом, в этом двигателе улучшение пусковых характеристик влечет за собой некоторое ухудшение рабочих характеристик.[9]
3.1.4 Регулирование скорости АД.
Наиболее распространены следующие способы регулирования скорости асинхронного двигателя: изменение дополнительного сопротивления цепи ротора, изменение напряжения, подводимого к обмотке статора, двигателя изменение частоты питающего напряжения, а также переключение числа пар полюсов.
1)Реостатное регулирование.
Этот способ регулирования скорости применим в двигателях с фазным ротором. При этом в цепь обмотки ротора включается реостат, которым можно плавно увеличивать сопротивление(рисунок 3.1.4 а). С увеличением сопротивления, скольжение двигателя растёт, а скорость падает. Таким образом, обеспечивается регулировка скорости вниз от естественной характеристики.
Недостатком данного способа является его неэкономичность, так как при увеличении скольжения, потери в цепи ротора растут, следовательно, КПД двигателя падает. Плюс к этому, механическая характеристика двигателя становится более пологой и мягкой, из-за чего небольшое изменение момента нагрузки на валу, вызывает большое изменение частоты вращения.
Изменение напряжения, подводимого к обмотке статора асинхронного двигателя, позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U1ном и статором электродвигателя включается регулятор напряжения.
2)Регулирование изменение напряжения.
При регулировании частоты вращения асинхронного двигателя(рисунок 3.1.4 б) изменением напряжения, подводимого к обмотке статора, критический момент
Если момент сопротивления рабочей машины больше пускового момента электродвигателя (
Регулировать частоту вращения короткозамкнутых асинхронных двигателей таким способом можно только при вентиляторном характере нагрузки. Кроме того, должны использоваться специальные электродвигатели с повышенным скольжением. Диапазон регулирования небольшой, до
Так же для изменения напряжения применяют трехфазные автотрансформаторы. Данный способ регулирования можно осуществить, если включить в цепь автотрансформатор, перед статором, после питающих проводов. При этом, если снижать напряжение на выходе автотрансформатора, то двигатель будет работать на пониженном напряжении. Это приведёт к снижению частоты вращения двигателя, при постоянном моменте нагрузки, а также к снижению перегрузочной способности двигателя. Это связано с тем, что при уменьшении напряжения питания, максимальный момент двигателя уменьшается в квадрат раз. Кроме того, этот момент уменьшается быстрее, чем ток в цепи ротора, а значит, растут и потери, с последующим нагревом двигателя.