Файл: Расчёт характеристик трансформатора и электрических двигателей.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 03.02.2024
Просмотров: 74
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

Способ регулирования изменением напряжения, возможен только вниз от естественной характеристики, так как увеличивать напряжение выше номинального нельзя, потому что это может привести к большим потерям в двигателе, перегреву и выходу его из строя. [10]
3)Регулирование изменением частоты питающего напряжения.
Принцип частотного метода регулирования скорости АД(рисунок 3,1,4 в) заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость магнитного поля статора.
Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью.
Для получения высоких энергетических показателей асинхронных двигателей (коэффициентов мощности, полезного действия, перегрузочной способности) необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки
Схема частотного электропривода приведена на рис. 5, а механические характеристики АД при частотном регулировании — на рис. 6.
С уменьшением частоты f критический момент несколько уменьшается в области малых частот вращения. Это объясняется возрастанием влияния активного сопротивления обмотки статора при одновременном снижении частоты и напряжения.
Частотное регулирование скорости асинхронного двигателя позволяет изменять частоту вращения в диапазоне (20 - 30) : 1. Частотный способ является наиболее перспективным для регулирования асинхронного двигателя с короткозамкнутым ротором. Потери мощности при таком регулировании невелики, поскольку минимальны потери скольжения.
Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока.
Силовой трехфазный импульсный инвертор содержит шесть транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя.
В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями. Регулирование выходной частоты
4)Регулирование изменением числа пар полюсов.
Такой способ регулирования возможен только в многоскоростных асинхронных двигателях с короткозамкнутым ротором, так как число полюсов этого ротора, всегда равно количеству полюсов статора.
Так как значение р определяется целыми числами, то переход от одной характеристики к другой в процессе регулирования носит ступенчатый характер.
Существует два способа изменения числа пар полюсов(рисунок 3.1.5). В первом случае в пазы статора укладывают две обмотки с разным числом полюсов. При изменении скорости к сети подключается одна из обмоток. Во втором случае обмотку каждой фазы составляют из двух частей, которые соединяют параллельно или последовательно. При этом число пар полюсов изменяется в два раза.
Регулирование скорости путем изменения числа пар полюсов экономично, а механические характеристики сохраняют жесткость. Недостатком этого способа является ступенчатый характер изменения частоты вращения асинхронного двигателя с короткозамкнутым ротором.[12]
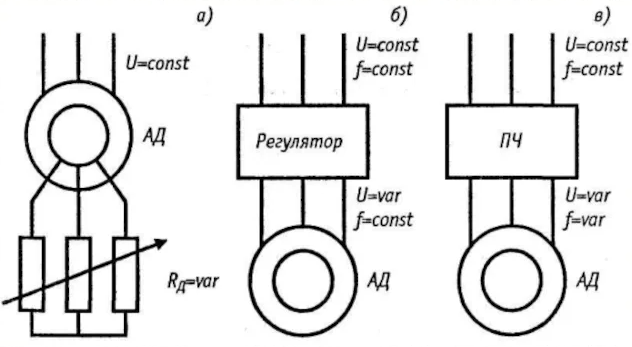
Рисунок 3.1.4 Способы регулирования скорости вращения
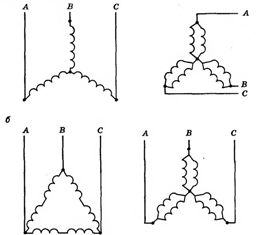
Рисунок 3.1.5 Схемы переключения обмоток асинхронного двигателя: а - с одинарной звезды на двойную; б - с треугольника на двойную звезду.

3.2 Расчет и исследование характеристик асинхронного двигателя.
Трехфазный асинхронный двигатель с короткозамкнутым ротором, паспортными данными, приведенными в табл.3.1, подключается к трехфазной сети переменного тока с линейным напряжением 380 В, частотой 50 Гц.
Таблица 3.1- Расчетные данные для исследования характеристик асинхронного двигателя.
| Номер варианта | | | | | | | | |
| 71 | 220 | 12 | 940 | 0,66 | 4 | 1,6 | 2 | 79 |
где
- кратность пускового тока;
3.2.1 Электрическую схема включения обмотки статора асинхронного двигателя.
Электрическую схема включения обмотки статора асинхронного двигателя при линейном напряжении 380 В(рисунок 3.1):
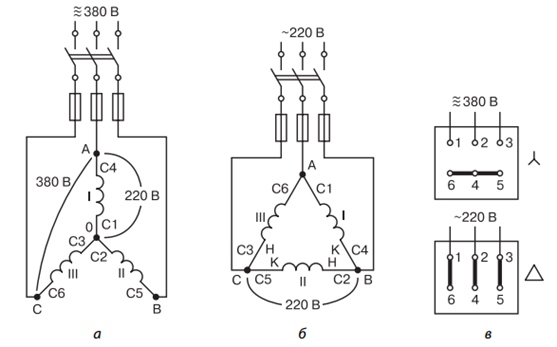
Рисунок 3.1 Электрическаю схема включения обмотки статора асинхронного двигателя.
3.2.2 Активная, реактивная и полная мощности двигателя.
Активная мощность потребляемая двигателем из сети при номинальном режиме найдём по формуле(3.1):
| | |
Где
Подставим табличные данный и получим:
Полная мощность потребляемая двигателем из сети при номинальном режиме найдём по формуле(3.2):
| Где | |
Подставим данные и получим:
Реактивную мощность асинхронного двигателя можно найти исходя из активной и полной мощностях по формуле(3.3)
| | |
Где S- Полная мощность двигателя, ВА
Реактивная мощность получается равной:
3.2.3Номинального и пускового токов; номинального, пускового и максимального моментов двигателя.
Номинальный ток асинхронного двигателя можно найти ,используя формулу(3.4):
| | |
Где
Подставим данные и получим номинальный ток:
Пусковой ток найдём из таблицы данных. По ней видно, что пусковой ток в 4 раза превышает номинальный ток.
Номинальный момент асинхронного двигателя определим по формуле(3.5):
| Где | |
Номинальная скорость двигателя определим по формуле ,схожей из формулы 1.5, только
Теперь можем найти номинальный момент:
Пусковой и критический момент найдем из таблицы данных.
3.2.4 Частоты вращения магнитного поля статора, номинального и критического скольжений.