ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 03.02.2024
Просмотров: 24
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

Министерство Российской Федерации
по делам гражданской обороны, чрезвычайным ситуациям
и ликвидации последствий стихийных бедствий
Ивановская пожарно-спасательная академия
Государственной противопожарной службы
Кафедра механики, ремонта и деталей машин
(в составе УНК «Пожаротушение»)
Курсовая работа
по дисциплине: прикладная механика
Тема: анализ плоского рычажного механизма.
Вариант № 93.
Выполнил: Липин Г.А., факультет техносферной безопасности, 22 курс,
223 учебная группа
Руководитель: заместитель начальника кафедры механики, ремонта и деталей машин (в составе УНК «Пожаротушение»),
полковник внутренней службы
А.А. Покровский
Дата защиты: «___» ____________ 2021 г.
Оценка _______________________
______________________________
(подпись руководителя)
Иваново 2021
ОГЛАВЛЕНИЕ
стр.
| Введение | 3 |
| Раздел 1 Структурный анализ механизмов | 7 |
| Раздел 2 Построение механизмов в масштабе | 13 |
| Раздел 3 Определение скоростей шарниров механизмов | 16 |
| Раздел 4 Определение угловых скоростей звеньев механизмов | 19 |
| Раздел 5 Определение ускорений шарниров механизмов | 21 |
| Раздел 6 Определение угловых ускорений звеньев механизмов | 24 |
| Заключение | 26 |
| Список использованной литературы | 27 |
| Приложения | 28 |
Введение
Механизмом называется связанная система тел, обеспечивающая передачу и преобразование движений и сил. Тела, образующие механизм, называются его звеньями. Звено может состоять из одного или нескольких жестко соединенных твердых тел, называемых деталями. Встречаются также механизмы с гибкими и жидкими звеньями. Конструктивные элементы, связывающие звенья и накладывающие ограничения (связи) на их относительные движения, называются кинематическими соединениями. Изучение механизма начинается с построения физической модели, т.е. с идеализации его реальных свойств. Выбор тех или иных моделей зависит в первую очередь от задач исследования, от того, какие сведения о поведении механизма требуется получить в процессе анализа. На различных этапах конструирования машины один и тот же механизм описывается разными физическими моделями. Несколько моделей механизмов можно получить и на одном этапе исследования. Первая задача курса ТММ – научить основным правилам перехода от реального механизма к его расчетной схеме, а также требованиям, предъявляемым к физической модели: ее адекватности, математической разрешимости, максимальной простоте и т.п. Наиболее простой моделью реального механизма является модель, называемая механизмом с жесткими звеньями. Переход от реального механизма к этой модели основывается на предположении, что все звенья рассматриваются как недеформируемые тела, а их кинематические соединения реализуют голономные, стационарные и удерживающие связи. В ряде случаев при исследовании пожарных машин используют более сложные модели механизмов, учитывающие зазоры в кинематических соединениях (неудерживающие связи), движения в шаровых соединениях (неголономные связи), силы трения (неидеальные связи), деформации звеньев (упругие связи) и т.п.
Механизм — система тел, предназначенная для преобразования движения одного или нескольких твердых тел в требуемые движения других твердых тел. Звено — твердое тело или система жестко связанных твердых тел, входящая в состав механизма. Все механизмы можно рассматривать как пространственные. Некоторые механизмы можно рассматривать и как плоские. Плоским называется механизм, звенья которого совершают движения в плоскостях, параллельных какой-либо одной плоскости. Движения звеньев механизма рассматривается в системе координат, связанной с одним из звеньев механизма. Это звено называется стойкой и принимается за неподвижное. Входное звено — звено, которому сообщается исходное движения; выходное — выполняет требуемое движение. Соединение двух соприкасающихся звеньев, допускающее их вполне определенное относительное движение, называется кинематической парой.

Кинематические пары классифицируются по следующим признакам:
-
виду контакта звеньев — на высшие (с контактом звеньев по линии или точке), и низшие (с контактом звеньев по поверхности); -
характеру относительного движения звеньев. Низшие КП подразделяются на вращательные, поступательные и винтовые; -
числу связей, наложенных КП на относительное движение звеньев (КП 1...5 классов); -
числу подвижностей в относительном движении звеньев КП — на кинематические пары с 1...5 подвижностями.
Кинематический анализ – это исследование движения звеньев механизма без учета сил, вызывающих данное движение.
При кинематическом анализе решаются следующие задачи:
-
определение положений звеньев, которые они занимают при работе механизма, а также построение траекторий движения отдельных точек механизма; -
определение скоростей характерных точек механизма и определение угловых скоростей его звеньев; -
определение ускорений отдельных точек механизма и угловых ускорений его звеньев.
При решении задач кинематического анализа используются все существующие методы – графический, графоаналитический (метод планов скоростей и ускорений) и аналитический.
При кинематическом анализе в качестве начального звена принимается входное звено (звено, закон движения которого задан), т.е. входное звено со стойкой составляют начальный механизм – с него начинается решение задачи.
Кинематический анализ механизма проводят без учета сил, вызывающих его движение, аналитическим или графическим методом. При этом решают в основном три задачи: 1) определение перемещений звеньев и траекторий заданных точек; 2) определение скоростей точек звеньев и угловых скоростей звеньев; 3) определение ускорений точек звеньев и угловых ускорений звеньев.
В пожарных автомобилях чаще всего используется поршневой двигатель внутреннего сгорания. Поршневой двигатель внутреннего сгорания представляет собой совокупность механизмов и систем: кривошипного механизма, механизмов газораспределения и передач, системы питания, смазки, охлаждения, зажигания и запуска.
Преобразование прямолинейного возвратно-поступательного движения поршня во вращательное движение коленчатого вала обеспечивает кривошипный механизм. Он состоит из цилиндра, картера, поршня, шатуна и коленчатого вала . В головке блока цилиндров размещаются впускные и выпускные клапаны механизма газораспределения, а также свеча зажигания (в дизельном двигателе —форсунка).
Рабочий цикл четырехтактного двигателя. При перемещении поршня внутри цилиндра двигателя в определенной последовательности происходит ряд процессов. Совокупность ряда последовательных процессов называется рабочим циклом. Газы, участвующие в осуществлении рабочего цикла, называются рабочим телом.
Рабочий цикл характеризуется изменением параметров состояния рабочего тела. Изменение давления газов в цилиндре за цикл представляют в виде графика, называемого индикаторной диаграммой. Такую диаграмму снимают на работающем двигателе прибором-индикатором. Диаграмму записывает самописец прибора за два оборота коленчатого вала. При этом поршень совершает четыре хода (по два хода от н. м. т. к в. м. т. и наоборот). Часть цикла, соответствующая одному ходу поршня, называется тактом.
1 Структурный анализ механизмов
-
Структурный анализ механизма №1
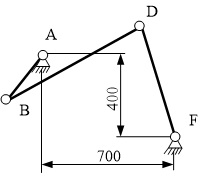
Рисунок 1.1 – Плоский рычажный механизм №1
В состав плоского многозвенного механизма №1 входят следующие звенья:
1) кривошип;
2) коромысло;
3) шатун.
Таким образом, количество подвижных звеньев n=3.
Звенья механизма образуют кинематические пары. Для определения количества кинематических пар, входящих в состав механизма №1 заполним таблицу 1, где для каждой кинематической пары определим ее класс и вид.
Таблица № 1 Классификация кинематических пар механизма №1
| № п/п | Изображение кинематических пар | Классы кинематических пар | Виды кинематических пар |
| 1 |  | 5 | Вращательная |
| 2 |  | 5 | Вращательная |
| 3 |    C | 5 | Вращательная |
| 4 |     D | 5 | Вращательная |
Таким образом, количество кинематических пар пятого класса p5=4, четвертого класса p4=0.
Далее определяем степень подвижности механизма №1 по формуле П.Л. Чебышева:
W=3∙n – 2∙p5 – p4; (1)
где n – количество подвижных звеньев механизма, n=3;
p4 – количество кинематических пар 4 класса, p4=0;
p5 – количество кинематических пар 5 класса, p5=4.
W =3∙3 – 2∙4=1.
Поскольку степень подвижности механизма W=1, то данный механизм подвижен, не имеет лишних связей.
1.2 Структурный анализ механизма №2
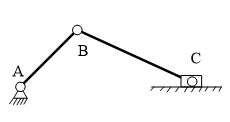
Рисунок 1.2 – Плоский рычажный механизм №2
В состав плоского многозвенного механизма №2 входят следующие звенья:
1) кривошип;
2) ползун;
3) коромысло;
Таким образом, количество подвижных звеньев n=3.
Звенья механизма образуют кинематические пары. Для определения количества кинематических пар, входящих в состав механизма №2 заполним таблицу 2, где для каждой кинематической пары определим ее класс и вид.
Таблица № 2 Классификация кинематических пар механизма №2
| № п/п | Изображение кинематических пар | Классы кинематических пар | Виды кинематических пар |
| 1 |     A A | 5 | Вращательная |
| 2 |  | 5 | Вращательная |
| 3 |  C C | 5 | Вращательная |
| 4 |  D D | 5 | Поступательная |