ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 03.02.2024
Просмотров: 25
Скачиваний: 0
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.

Таким образом, количество кинематических пар пятого класса p5=4, четвертого класса p4=0.
Далее определяем степень подвижности механизма №2 по формуле
П.Л. Чебышева:
W=3∙n – 2∙p5 – p4; (1)
где n – количество подвижных звеньев механизма, n=3;
p4 – количество кинематических пар 4 класса, p4=0;
p5 – количество кинематических пар 5 класса, p5=4.
W =3∙3 – 2∙4=1.
Поскольку степень подвижности механизма W=1, то данный механизм подвижен, не имеет лишних связей.
1.3 Структурный анализ механизма №3
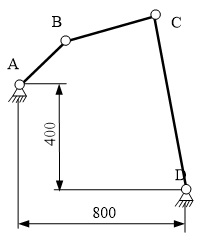
Рисунок 1.3 – Плоский рычажный механизм №3
В состав плоского многозвенного механизма №3 входят следующие звенья:
1) кривошип;
2) шатун;
3) коромысло;
Таким образом, количество подвижных звеньев n=3.
Звенья механизма образуют кинематические пары. Для определения количества кинематических пар, входящих в состав механизма №3 заполним таблицу 3, где для каждой кинематической пары определим ее класс и вид.
Таблица № 3 Классификация кинематических пар механизма №3
| № п/п | Изображение кинематических пар | Классы кинематических пар | Виды кинематических пар |
| 1 |     A A | 5 | Вращательная |
| 2 |  | 5 | Вращательная |
| 3 |    C C | 5 | Вращательная |
| 4 |  D D | 5 | Вращательная |
Таким образом, количество кинематических пар пятого класса p5=4, четвертого класса p4=0.
Далее определяем степень подвижности механизма №3 по формуле
П.Л. Чебышева:
W=3∙n – 2∙p5 – p4; (1)
где n – количество подвижных звеньев механизма, n=3;
p4 – количество кинематических пар 4 класса, p4=0;
p5 – количество кинематических пар 5 класса, p5=4.
W =3∙3 – 2∙4=1.
Поскольку степень подвижности механизма W=1, то данный механизм подвижен, не имеет лишних связей.
2 Построение механизмов в масштабе
2.1 Построение механизма №1 в масштабе
Для построения механизма на листе формата А4 необходимо подобрать масштаб. Для этого переводим заданные размеры звеньев механизма №1 в метры:
lAB=0,8м ; lBC = 2,1м; lDC = 2м;
Масштаба построения механизма №1 будет определяться следующим образом:
 =0,8/20=0.04 м/мм.
=0,8/20=0.04 м/мм.После определения масштабного коэффициента механизма №1 перейдем к определению длин всех его звеньев в масштабе:
 ;
; ;
;Далее проводим построение механизма №1 в заданном положении на листе формата А4.
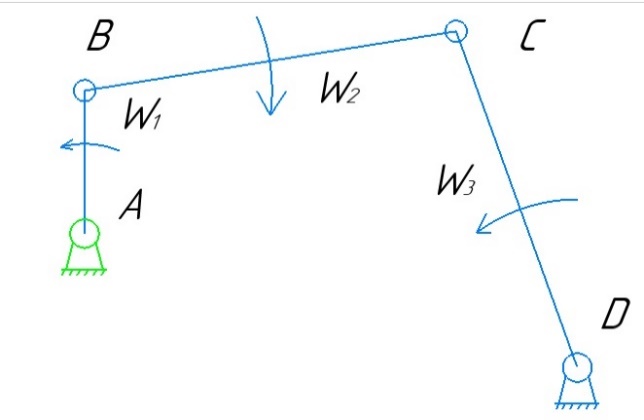
Рисунок 2.1 – Плоский рычажный механизм №1
2.2 Построение механизма №2 в масштабе
Для построения механизма на листе формата А4 необходимо подобрать масштаб. Для этого переводим заданные размеры звеньев механизма №2 в метры:
lAB = 0,5м; lBC = 2,5 м;
Масштаба построения механизма №2 будет определяться следующим образом:
=0,5/5=0,1 м/мм.После определения масштабного коэффициента механизма №2 перейдем к определению длин всех его звеньев в масштабе:
 .
.Далее проводим построение механизма №2 в заданном положении на листе формата А4.
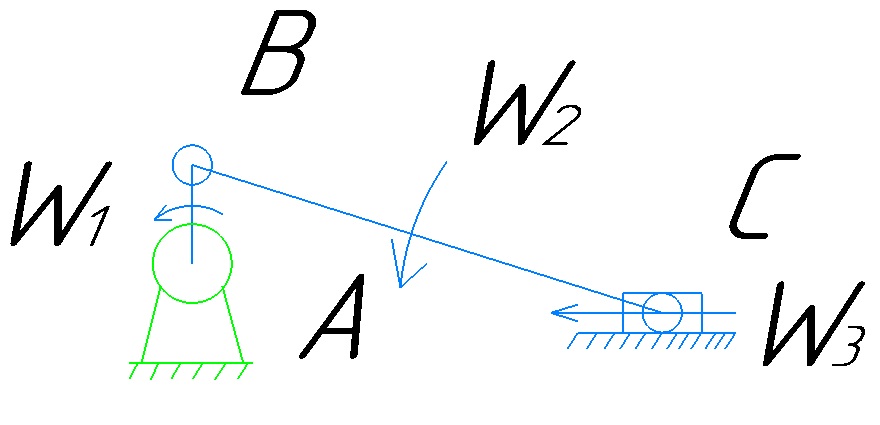
Рисунок 2.2 – Плоский рычажный механизм №2
2.3 Построение механизма №3 в масштабе
Для построения механизма на листе формата А4 необходимо подобрать масштаб. Для этого переводим заданные размеры звеньев механизма №3 в метры:

lAB =1 м; lBC = 1,75м; lDC = 1,6м;
Масштаба построения механизма №3 будет определяться следующим образом:
 =1/10=0,1 м/мм.
=1/10=0,1 м/мм.После определения масштабного коэффициента механизма №1 перейдем к определению длин всех его звеньев в масштабе:
 ;
; ;
;.
Далее проводим построение механизма №3 в заданном положении на листе формата А4.
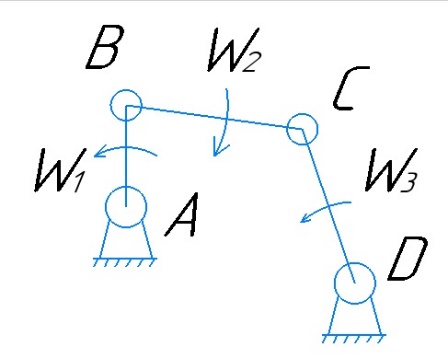
Рисунок 2.3 – Плоский рычажный механизм №3
3 Определение скоростей шарниров механизмов
3.1 Определение скоростей шарниров механизма №1
Для определения скоростей шарниров механизма используем графоаналитический метод.
Определение скорости точки А:
Определение скорости точки В:
 ;
;Определение масштаба плана скоростей:
 ;
;Для определения скоростей шарниров веньев, совершающих плоско-параллельное движение (шатуны, коромысла) воспользуемся теоремой о сложении скоростей при плоскопараллельном движении.
 Определение скорости точки С:
Определение скорости точки С:
Все найденные вектора скоростей шарниров механизма представим на соответствующем плане скоростей механизма №1.
3.2 Определение скоростей шарниров механизма №2
Для определения скоростей шарниров механизма используем графоаналитический метод.
Определение скорости точки А:
Определение скорости точки В:

Определение масштаба плана скоростей:
Для определения скоростей шарниров звеньев, совершающих плоско-параллельное движение (шатуны, коромысла) воспользуемся теоремой о сложении скоростей при плоскопараллельном движении.
 Определение скорости точки С:
Определение скорости точки С:
Все найденные вектора скоростей шарниров механизма представим на соответствующем плане скоростей механизма №2.
3.3 Определение скоростей шарниров механизма №3
Для определения скоростей шарниров механизма используем графоаналитический метод.
Определение скорости точки А:
Определение скорости точки В:

Определение масштаба плана скоростей:
Для определения скоростей шарниров звеньев, совершающих плоско-параллельное движение (шатуны, коромысла) воспользуемся теоремой о сложении скоростей при плоскопараллельном движении.
Определение скорости точки С:
Все найденные вектора скоростей шарниров механизма представим на соответствующем плане скоростей механизма №3.
4 Определение угловых скоростей звеньев механизмов
Для определения угловых скоростей звеньев механизма находим значения переносных скоростей данных звеньев графическим методом. Для этого длины векторов переносных скоростей данных звеньев умножаем на значение масштаба плана скоростей. Полученное значение переносной скорости соотносим с заданными длинами звеньев.
4.1 Определение угловых скоростей звеньев механизма №1
Угловая скорость звена АВ (кривошипа):

Угловая скорость звена ВС (шатуна):

Угловая скорость звена СD (коромысла):

4.2 Определение угловых скоростей звеньев механизма №2
Угловая скорость звена АВ (кривошипа):

Угловая скорость звена ВС (шатуна):

4.3 Определение угловых скоростей звеньев механизма №3
Угловая скорость звена АВ (кривошипа):

Угловая скорость звена ВС (шатуна):

Угловая скорость звена СD (коромысла):

5 Определение ускорений шарниров механизмов
5.1 Определение ускорений шарниров механизма №1
Аналогично определению скоростей точек шарниров многозвенного механизма, воспользуемся графоаналитическим методом.
Определение ускорения точки А:
Определение ускорения точки В:
 197,2 м/с2;
197,2 м/с2;Определение масштаба плана ускорений:
 ;
;Для определения ускорений шарниров звеньев многозвенного механизма, совершающих плоско-параллельное движение (шатуны, коромысла), воспользуемся теоремой о сложении ускорений при плоскопараллельном движении.
 Определение ускорения точки С:
Определение ускорения точки С: ;
;