Файл: Перечень вопросов к зачёту по дисциплине Воздушная навигация и аоп.docx
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 29.04.2024
Просмотров: 125
Скачиваний: 0
СОДЕРЖАНИЕ
ПЕРЕЧЕНЬ ВОПРОСОВ К ЗАЧЁТУ по дисциплине «Воздушная навигация и АОП»
2. Основные географические точки, линии и круги на земном шаре.
3. Системы координат, применяемые в воздушной навигации
4. Масштаб карты. Виды масщтабов, их определения.
5. Основные виды картографических проекций. Разграфка и номенклатура карт.
6. Магнитное склонение. Причины возникновения.
7. Девиация магнитного компаса. Порядок учета.
8. Взаимозависимость курсовУК, ИК, МК, КК
9. Путевые углы и способы их определения.
11. Классификация высот полета по уровню начала полета.
12. Основные способы измерения высоты полета.
13. Погрешности барометрических высотомеров и их учет
15.Погрешности измерения воздушной скорости и их учет.
16. Классификация ориентиров и их главные отличительные признаки
17. Правила и порядок ведения визуальной ориентировки.
18. Система счисления времени.
19. Время местное, поясное и всемирное скоординированное (UTC)
20. Общая характеристика и виды радиотехнических систем.
21.Основные радионавигационные элементы (курсовые углы и пеленги)
22.Горизонтальное эшелонирование ВС.
23. Вертикальное эшелонирование ВС.
24. Продольное эшелонирование ВС.
25. Расчет безопасной высоты круга полётов над аэродромом.
26. Расчет безопасной высоты района аэродрома.
27. Определение высоты перехода
28. Расчет безопасной высоты полёта ниже нижнего (безопасного) эшелона.
29. Расчёт нижнего безопасного эшелона полёта.
30. Расчёт высоты эшелона перехода района аэродрома
31. Действия экипажа в случае потери ориентировки.
32. Безопасность самолётовождения.
20. Общая характеристика и виды радиотехнических систем.
1. По месту расположения РТС самолетовождения делятся на:
-
наземные (приводные и радиовещательные станции, станции радионавигационных систем, радиопеленгаторы, радиомаяки, радиолокаторы и радиомаркеры).
Наземные радиотехнические средства принято называть радионавигационными точками (РНТ);
-
самолетные (радиокомпасы, самолетные радиолокаторы и радиостанции, специальное самолетное оборудование навигационных систем, доплеровские измерители угла сноса и путевой скорости, радиовысотомеры).
Наземные и некоторые самолетные радиотехнические средства используются в самолетовождении совместно.
Например: самолетные радиокомпасы применяются, когда работают приводные или радиовещательные станции;
наземные радиопеленгаторы могут запеленговать самолет, если на нем установлена радиостанция, и т. д.
Самолетное радионавигационное оборудование и соответствующее ему наземное радиотехническое устройство составляют радиотехническую (радионавигационную) систему самолетовождения.
2. По дальности действия радиотехнические системы самолетовождения делятся на:
системы дальней навигации,
системы ближней навигации ,
системы посадки самолетов.
3. По характеру измеряемых величин радиотехнические системы делятся на:
угломерные,
дальномерные,
угломерно-дальномерные,
разностно-дальномерные (гиперболические).
-
Угломерными называются такие радиотехнические системы, которые позволяют определять направление от самолета на РНТ или от РНТ на самолет. -
Для всех угломерных систем общим является то, что они дают возможность определять угловые величины – пеленг самолета или пеленг РНТ.
Линия пеленга является линией положения самолета,
т. е. геометрическим местом точек вероятного местонахождения самолета, определяемым постоянством измеренной величины.
Современные угломерные радиотехнические системы позволяют измерять направления с точностью 1–3°.
-
Дальномерными называются такие радиотехнические системы, которые позволяют определять расстояние (дальность) от самолета до РНТ или от РНТ до самолета.
При использовании дальномерных радиотехнических систем линией положения самолета является дуга окружности, проведенная радиусом, равным дальности. Центр ее расположен в точке установки наземной станции.
-
Угломерно-дальномерными, или смешанными, называются системы, позволяющие одновременно измерять направление и дальность.
К угломерно-дальномерным системам относятся наземные и самолетные радиолокаторы, системы ближней навигации.
-
Гиперболические системы называются так потому, что линия положения, определяемая при помощи этой системы, является гиперболой.
Принцип действия гиперболической системы основан на измерении с помощью приемоиндикатора временной разности между приходом сигналов от ведущей и ведомой станций. Эта разность определяет линию положения самолета в виде гиперболы. Дальность действия системы составляет 3000–4500 км.
21.Основные радионавигационные элементы (курсовые углы и пеленги)
Основными радионавигационными элементами при использовании радиокомпаса являются:
курсовой угол радиостанции (КУР),
пеленг радиостанции (ИПР, МПР),
пеленг самолета (ИПС, МПС).
-
Курсовым углом радиостанцииназывается угол, заключенный между продольной осью самолета (ПОС) и направлением на радиостанцию.
КУР отсчитывается по ходу часовой стрелки от 0 до 360°
//Зная курсовой угол радиостанции и имея показания магнитного компаса, можно решать следующие задачи:
-
определять положение радиостанции по отношению к продольной оси самолета; -
определять момент пролета контрольного ориентира или ППМ; -
определять момент выхода самолета на ЛЗП; -
определять момент пролета радиостанции или ее траверза; -
определять пеленг радиостанции и пеленг самолета; -
осуществлять контроль за построением маневра при заходе на посадку в сложных метеоусловиях. //
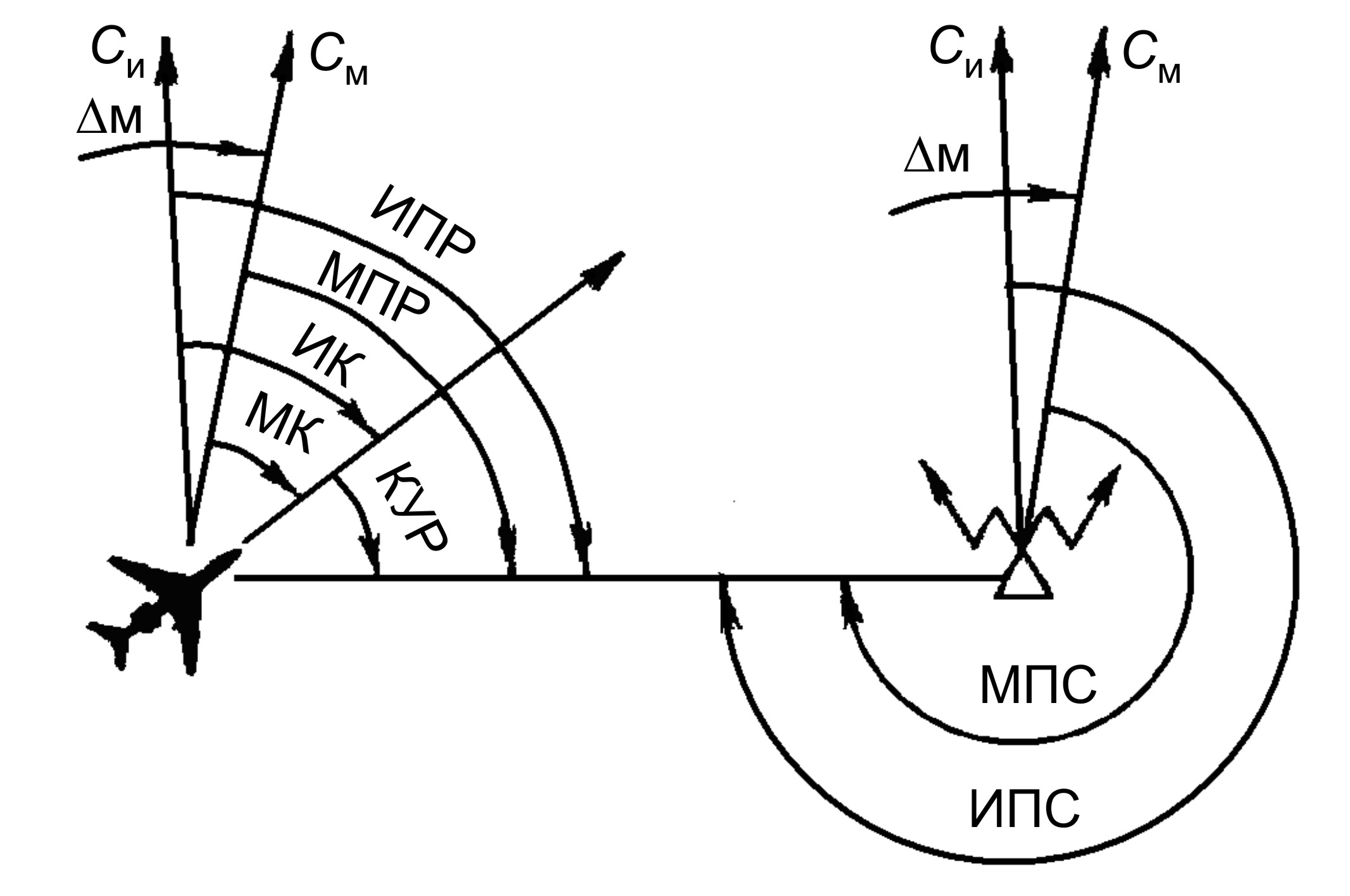

Пеленгом радиостанции называется угол, заключенный между северным направлением меридиана, проходящего через самолет, и действительным направлением на радиостанцию.
Пеленг радиостанции отсчитывается от северного направления меридиана по ходу часовой стрелки до направления на радиостанцию от 0 до 360°
Пеленг называется магнитным, если отсчет ведется от магнитного меридиана, и истинным, если отсчет ведется от истинного меридиана.
Пеленги радиостанции рассчитываются по следующим формулам:
МПР = МК + КУР;
МПР = КК + ( ± Δк) + КУР;
ИПР = ИК + КУР;
ИПР = МК + (± Δм) + КУР.
При КУР = 0° МПР = МК.
Пеленгом самолета называется угол, заключенный между северным направлением меридиана, проходящего через радиостанцию, и ортодромическим направлением на самолет.
Пеленг самолета отсчитывается от северного направления меридиана по ходу часовой стрелки от 0 до 360°.
Пеленг самолета называется истинным, если отсчет ведется от истинного меридиана, и магнитным, если отсчет ведется от магнитного меридиана
Пеленги самолетов рассчитываются по следующим формулам:
МПС = МПР ± 180°;
ИПС = ИК + КУР ± 180°;
МПС = МК + КУР ± 180°;
ИПС = МК + (± Δм) + КУР ± 180°;
ИПС = МПС + (±Δм).
При КУР = 180° МПС = МК.
Указанные формулы для расчета ИПС используются в том случае, когда разность между долготой радиостанции и долготой самолета менее 2°. Если эта разность составляет 2° и более, то при расчете ИПС необходимо учитывать поправку на угол схождения меридианов.
22.Горизонтальное эшелонирование ВС.
Под эшелонированием понимается единая система рассредоточения самолетов в воздушном пространстве, обеспечивающая постоянное и надежное сохранение безопасных расстояний между находящимися в воздухе ВС и на безопасном расстоянии от наземных препятствий.
Горизонтальным эшелонированием называют рассредоточение воздушных судов в горизонтальной плоскости по расстоянию на установленные интервалы.
75. В воздушном пространстве устанавливаются минимальные интервалы горизонтального эшелонирования
76. Минимальные интервалы горизонтального эшелонирования при использовании системы наблюдения обслуживания воздушного движения устанавливаются:
а) при районном диспетчерском обслуживании и диспетчерском обслуживании подхода - не менее 10 км;
б) при аэродромном диспетчерском обслуживании:
не менее 5 км, за исключением случаев выполнения процедур параллельных взлетов и посадок воздушных судов;
не менее 10 км в тех случаях, когда:
воздушное судно следует за воздушным судном массой 136000 кг и более;
воздушное судно пересекает след воздушного судна массой 136000 кг и более;
воздушное судно, следующее позади воздушного судна массой 136000 кг и более, использует одну и ту же взлетно-посадочную полосу или параллельные взлетно-посадочные полосы, расположенные на расстоянии менее 1000 метров между их осевыми линиями.
23. Вертикальное эшелонирование ВС.
Под эшелонированием понимается единая система рассредоточения самолетов в воздушном пространстве, обеспечивающая постоянное и надежное сохранение безопасных расстояний между находящимися в воздухе ВС и на безопасном расстоянии от наземных препятствий.
Вертикальное эшелонирование представляет собою основную систему рассредоточения самолетов в воздушном пространстве на различных высотах полета, оно обеспечивает безопасное расстояние по вертикали между самолетами, летящими на встречных, попутных и пересекающихся курсах, и одновременно безопасную высоту полета над высшей точкой наземных препятствий.
68. В воздушном пространстве устанавливаются минимальные интервалы вертикального эшелонирования:
а) до эшелона полета 290 - 300 м;
б) от эшелона полета 290 до эшелона полета 410: 300 м
- между воздушными судами, допущенными к полетам с применением RVSM;
600 м:
между государственными и экспериментальными воздушными судами, не допущенными к полетам с применением RVSM, и любыми другими воздушными судами;
между государственными и экспериментальными воздушными судами, выполняющими полет в составе группы, и любыми другими воздушными судами;
между воздушным судном, внезапное ухудшение работы оборудования которого не обеспечивает выдерживания заданного эшелона полета, и любыми другими воздушными судами;
между воздушным судном, попавшим в зону сильной турбулентности, вызванной метеорологическими условиями или спутным следом, непосредственно влияющей на способность воздушного судна выдерживать заданный эшелон полета, и любыми другими воздушными судами;
между воздушным судном, выполняющим полет с отказавшей радиосвязью, и любыми другими воздушными судами.
Вход в воздушное пространство от эшелона полета 290 до эшелона полета 410 воздушным судам (кроме государственных и экспериментальных воздушных судов), не допущенных к полетам с применением RVSM, запрещен. Требования к эксплуатантам и оборудованию воздушных судов для получения допуска к полетам с применением RVSM, а также порядок контроля за характеристиками выдерживания высоты воздушными судами (мониторинг) устанавливается Министерством транспорта Российской Федерации. Допуск эксплуатантов и воздушных судов гражданской, государственной и экспериментальной авиации к полетам с применением RVSM осуществляется соответственно Федеральным агентством воздушного транспорта, Министерством обороны Российской Федерации, а также Министерством промышленности и торговли Российской Федерации;
в) выше эшелона полета 410 - 600 м.
69. Вертикальное эшелонирование воздушных судов в воздушном пространстве Российской Федерации осуществляется по полукруговой системе относительно истинного меридиана согласно приложению.
70. В районе контролируемого аэродрома, в зоне аэродромного диспетчерского обслуживания, в зоне диспетчерского обслуживания подхода и в зонах ожидания вертикальное эшелонирование устанавливается независимо от направления полета воздушного судна.
71. Минимальный интервал вертикального эшелонирования между воздушными судами, выполняющими полет на сверхзвуковой скорости, а также между воздушными судами, выполняющими полет на сверхзвуковой и дозвуковой скорости, должен быть 1000 м.