Файл: Лекция Принципы управления 2 Общие понятия 2 Лекция Статический режим сау 7.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 02.05.2024
Просмотров: 167
Скачиваний: 0

СОДЕРЖАНИЕ
Лекция 2. Статический режим САУ
Лекция 3. Динамический режим САУ
3.1. Динамический режим САУ. Уравнение динамики
Лекция 4.Структурные схемы САУ
4.1. Эквивалентные преобразования структурных схем
4.2. САР напряжения генератора постоянного тока
Лекция 5.Временные характеристики
5.1. Понятие временных характеристик
5.2. Переходные характеристики элементарных звеньев
Лекция 6. Частотные характеристики
6.2. Частотные характеристики типовых звеньев
7.1. Частотные характеристики разомкнутых одноконтурных САУ
Лекция 8. Алгебраические критерии устойчивости
8.1. Понятие устойчивости системы
8.2. Алгебраические критерии устойчивости
Лекция 9. Частотные критерии устойчивости
9.2. Критерий устойчивости Михайлова
9.3. Критерий устойчивости Найквиста
Лекция 10.D-разбиение. Запас устойчивости
10.1. Понятие структурной устойчивости. АФЧХ астатических САУ
10.2. Понятие запаса устойчивости
10.3. Анализ устойчивости по ЛЧХ
11.1. Теоретическое обоснование метода D-разбиений
11.2. D-разбиение по одному параметру
11.3. Прямые методы оценки качества управления
Лекция 13. Частотные методы оценки качества
13.1. Теоретическое обоснование
13.2. Основные соотношения между ВЧХ и переходной характеристикой
14.2. Коррекция свойств САУ изменением параметров звеньев
Лекция 15. Включение корректирующих звеньев
15.1. Коррекция свойств САУ включением последовательных корректирующих звеньев
15.1.1. Включение интегрирующего звена в статическую САУ
15.2. Последовательная коррекция по задающему воздействию
yсв(0) = y0,
 = y0(n-1).
= y0(n-1). Кроме того
yсв( ) = 0, ( ) = 0,...,
 ( ) = 0,
( ) = 0, так как процесс затухает и при t свободная составляющая и все производные становятся равны нулю. Подставляя эти значение, получаем:
Joo = (a0y0(n-1) + a1y0(n-1) + ... + an-1y0)/(an.
То есть линейную оценку качества регулирования можно легко вычислить, зная начальные условия и коэффициенты дифференциального уравнения. Возможны и другие линейные оценки качества, но они используются реже, например:
J01 = св(t) t dt;
J0n = св(t) tndt.
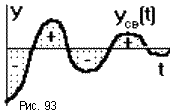
Линейные оценки качества неприменимы при колебательном процессе. Так как площади, ограниченные кривой yсв(t) и осью абсцисс складываются с учетом знака, то минимальному значению Joo может соответствовать процесс с большим числом колебаний и малым быстродействием (рис.93). В этом случае более эффективны квадратичные оценки качества, например,
J20 = yсв2(t)dt.
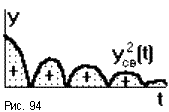
Значение этого интеграла соответствует площади под кривой yсв2(t) и осью абсцисс, которая всегда положительна (рис.94).
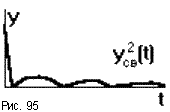
Выбирая параметры САУ по минимуму J20 мы приближаем кривую yсв(t) к осям координат, что приводит к уменьшению времени регулирования (рис.95). Вывод формулы для вычисления этой оценки сложен, поэтому ограничимся замечанием, что значение вычисляется через коэффициенты дифференциального уравнения a0...an,b0...bm. При вычислении слагаемых в этой формуле используются определители Гурвица, так что даже расчет по ней сопряжен с определенными трудностями и требует использования ЭВМ или специальных таблиц.
При выборе параметров САУ по минимуму J20 часто получают нежелательную колебательность процесса, так как приближение yсв(t) к оси ординат вызывает резкое увеличение начальной скорости, что в свою очередь может вызвать большое перерегулирование, уменьшив при этом запас устойчивости. Для того, чтобы обеспечить плавность протекания процесса, в квадратичную оценку качества добавляется слагаемое, зависящее от скорости изменения регулируемого параметра yсв’(t). Получаем критерий качества
J21 = св2(t) + t2 (yсв’(t))2]dt,
где - некоторая наперед заданная постоянная времени, определяющая весовое соотношение между оценкой по yсв и по yсв’. При малых значениях уменьшение колебательности будет незначительным. Завышение увеличит время переходного процесса так, что ее выбор определяется конкретными условиями.

Этот интеграл имеет наименьшее значение, если переходный процесс соответствует экспоненте с постоянной времени (рис.96). Другими словами, по соображениям качества управления следует стремиться к тому, чтобы переходная характеристика замкнутой САУ как можно меньше отличалась от характеристики инерционного звена первого порядка, имеющего наперед заданную постоянную времени , значение которой определяются техническими условиями.
Задача выбора параметров САУ по минимуму J20 и J21 решается аналитически только в случае невысокого порядка дифференциального уравнения. Иначе используют ЭВМ.

Лекция 13. Частотные методы оценки качества
13.1. Теоретическое обоснование
Частотные методы основаны на привычном для инженеров графическом изображении динамических характеристик, которые можно снять экспериментально, поэтому они находят широкое применение. В частности зная АФЧХ разомкнутой САУ Wp(j ), можно построить АФЧХ замкнутой САУ
Wз(j ) =
 = Pз( ) + jQз( ),
= Pз( ) + jQз( ), а по ней - требуемую для частотных методов вещественную ЧХ замкнутой САУ Pз( ). Зная ВЧХ замкнутой САУ, можно приближенно построить переходную характеристику САУ h(t), которую снять экспериментально очень трудно, и по ней определить показатели качества управления.
Теоретическое обоснование этого в том, что любую функцию, в том числе и единичную ступенчатую, можно разложить в ряд Фурье:
1(t) = A0 + Ak1cos(k t) + Ak2sin(k t)].
Так как замкнутая САУ линейна, то при подаче на вход суммы сигналов с выхода снимается сигнал, равный сумме реакций на каждый из входных сигналов. Входному сигналу ui(wi,t) на выходе будет соответствовать составляющая выходного сигнала yi( i,t) = W(j i) ui( i,t), тогда
h(t) =
 = A0W(0) + (jkw) [Ak1cos(kwt) + Ak2sin(kwt)].
= A0W(0) + (jkw) [Ak1cos(kwt) + Ak2sin(kwt)]. Преобразование этого выражения приводит к двум равнозначным формулам определения h(t) через составляющие ВЧХ:
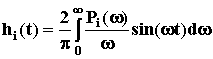
 ;
;  ,
, где P( ) и Q( ) - вещественная и мнимая части АФЧХ замкнутой САУ. Предпочтение обычно оказывают первой формуле, хотя с одинаковым успехом можно использовать и вторую.
Точно вычислить эти интегралы можно только с помощью ЭВМ, но в практике нашел широкое применение приближенный способ построения переходной характеристики на основе
линейной аппроксимации ВЧХ замкнутой САУ, который называется метод трапеций. Прежде, чем рассматривать этот метод, рассмотрим без доказательства основные соотношения между ВЧХ замкнутой САУ и ее переходной характеристикой.
13.2. Основные соотношения между ВЧХ и переходной характеристикой
1. Начальное значение ВЧХ P(0) равно установившемуся значению переходной характеристики hуст = P( ) = P(0).
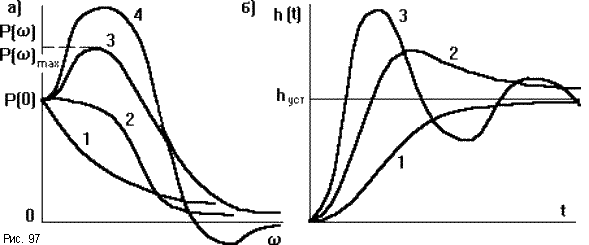
2. САУ с вогнутой ВЧХ (рис.97а кривая 1) не имеет перерегулирования, то есть ей соответствует монотонная переходная характеристика (рис.97б кривая 1).
3. САУ с трапециидальной ВЧХ (рис.97а кривая 2, такую ВЧХ можно аппроксимировать трапецией) имеет апериодическую переходную характеристику (рис.97б кривая 2), причем величина перерегулирования smax не превышает 18%.
4. Кривые 3 и 4 на рис.97а соответствуют колебательной переходной характеристике (рис.97б кривая 3). Величина перерегулирования smax тем больше, чем больше отношение P( )max/P(0). Если это отношение стремится к бесконечности, то есть имеет место разрыв ВЧХ, то переходная характеристика приобретает вид незатухающих колебаний и САУ переходит на границу устойчивости. Величину перерегулирования можно приблизительно вычислить исходя из соотношения
smax <
 .
. 
Наличие отрицательного экстремума у ВЧХ (кривая 4) свидетельствует о повышенной колебательности системы.
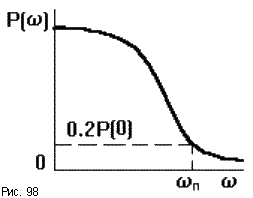
5. Время переходного процесса tпп можно оценить приблизительно по виду ВЧХ без построения кривой h(t). Оно определяется полосой частот wп, при которых P( ) > 0.2P(0) (рис.98). п называют интервалом положительности P( ). При этом всегда tпп >p/ п. Для кривой 1 рис.97а: tпп 4 / п. Для кривой 2: tпп (1..4)4 / п. Для кривых 3 и 4 коэффициент пропорциональности больше, причем он тем больше, чем больше отношение P( )max/P(0).
13.3. Метод трапеций
Этот метод основан на свойствах ВЧХ, следующих из полученной ранее формулы, которые мы рассмотрим без доказательств.
1. Свойство линейности: если ВЧХ можно представить суммой P( ) = SPi( ), то каждой составляющей Pi( ) будет соответствовать составляющая переходной характеристики

 ,
, при этом h(t) = (рис.99а). Поэтому, если ВЧХ имеет сложную форму, ее можно представить суммой трапециидальных ВЧХ, примыкающих к вертикальной оси. Затем все трапеции перерисовывают, перенося их основания на горизонтальную ось (рис.99б). Каждой такой трапеции соответствует своя составляющая переходной характеристики hi(t), имеющая апериодический характер (рис.99в).
Результирующая кривая строится суммированием данных составляющих.
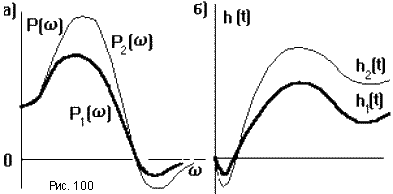
2. Если умножить P( ) на постоянный множитель а, то соответствующая ей h(t) также умножается на а. То есть, чем выше ВЧХ, тем выше и переходная характеристика (рис.100).
3. Если аргумент w в выражении ВЧХ P( ) умножить на постоянный множитель а, то аргумент в h(t) будет делиться на это число, то есть
.

То есть переходный процесс в случае P(a ) будет протекать в а раз быстрее, чем в случае P( ) (рис.101).
Рассмотрим трапециидальную ВЧХ (рис.102а). Она характеризуется коэффициентом наклона k = 1 2. Под единичной трапецией (рис.102б) понимают трапецию, две стороны которой совпадают с осями координат и равны по 1 в соответствующих масштабах; наклон k может быть различным: P1( ) =
 .
. 