Файл: Лекция Принципы управления 2 Общие понятия 2 Лекция Статический режим сау 7.doc
ВУЗ: Не указан
Категория: Не указан
Дисциплина: Не указана
Добавлен: 02.05.2024
Просмотров: 141
Скачиваний: 0

СОДЕРЖАНИЕ
Лекция 2. Статический режим САУ
Лекция 3. Динамический режим САУ
3.1. Динамический режим САУ. Уравнение динамики
Лекция 4.Структурные схемы САУ
4.1. Эквивалентные преобразования структурных схем
4.2. САР напряжения генератора постоянного тока
Лекция 5.Временные характеристики
5.1. Понятие временных характеристик
5.2. Переходные характеристики элементарных звеньев
Лекция 6. Частотные характеристики
6.2. Частотные характеристики типовых звеньев
7.1. Частотные характеристики разомкнутых одноконтурных САУ
Лекция 8. Алгебраические критерии устойчивости
8.1. Понятие устойчивости системы
8.2. Алгебраические критерии устойчивости
Лекция 9. Частотные критерии устойчивости
9.2. Критерий устойчивости Михайлова
9.3. Критерий устойчивости Найквиста
Лекция 10.D-разбиение. Запас устойчивости
10.1. Понятие структурной устойчивости. АФЧХ астатических САУ
10.2. Понятие запаса устойчивости
10.3. Анализ устойчивости по ЛЧХ
11.1. Теоретическое обоснование метода D-разбиений
11.2. D-разбиение по одному параметру
11.3. Прямые методы оценки качества управления
Лекция 13. Частотные методы оценки качества
13.1. Теоретическое обоснование
13.2. Основные соотношения между ВЧХ и переходной характеристикой
14.2. Коррекция свойств САУ изменением параметров звеньев
Лекция 15. Включение корректирующих звеньев
15.1. Коррекция свойств САУ включением последовательных корректирующих звеньев
15.1.1. Включение интегрирующего звена в статическую САУ
15.2. Последовательная коррекция по задающему воздействию
Раскладываем данную передаточную функцию на передаточные функции элементарных звеньев:
1) безынерционное звено:
W1 = K1 = 100 => L(w) = 20lg100 = 40;
2) форсирующее звено:
W2 = p + 1;
его параметры:
K2 = 1, T2 = 1, 2 = 1/T2 = 1;
3) интегрирующее звено:
W3 = 1/p;
его ЛАЧХ проходит через точку L = 0 при частоте = 1;
4) апериодическое звено:
W4 = 1/(0.1p + 1);
его параметры: K4 = 1, T4 = 0.1, 4 = 1/T4 = 10.
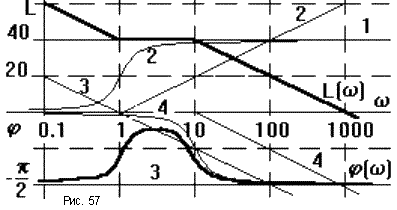
Порядок построения ЛАЧХ и ЛФЧХ показан на рис.57.
Иногда требуется решить обратную задачу, то есть определить передаточную функцию по известной ЛАЧХ. Процедура определения передаточной функции состоит из следующих этапов:
1) известная ЛАЧХ представляется в асимптотическом виде, для этого непрерывная кривая заменяется отрезками прямых либо горизонтальных, либо с наклоном, кратным ±20 дб/дек;
2) асимптотическая ЛАЧХ раскладывается на ЛАЧХ элементарных звеньев;
3) для каждой из полученных ЛАЧХ определяются k и 1 = 1/T и записывается передаточная функция типового звена;
4) передаточная функция САУ определяем путем перемножения передаточных функций типовых звеньев.
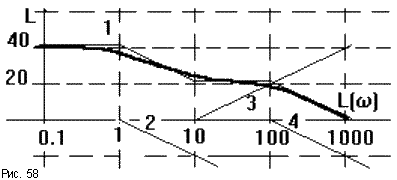
Описанный порядок иллюстрируется на рис.58.
Здесь ЛАЧХ может быть представлена суммой ЛАЧХ четырех типовых звеньев: пропорционального W1 = 100, апериодического W2 = 1/(p + 1), форсирующего W3 = 0.1p + 1 и апериодического W4 = 1/(0.01p + 1).
Таким образом, передаточная функция разомкнутой САУ имеет вид
 .
. В более сложных случаях наклоны ЛАЧХ на некоторых участках превышают ± 20дб/дек. Тогда помимо параметров
K и T приходится определять еще и коэффициенты демпфирования r.
Зная передаточную функцию разомкнутой САУ можно построить ее уравнение динамики
 =>
=>  .
. Таким образом можно определить уравнение динамики реальных звеньев и всей реальной САУ, если оно теоретически это сделать затруднительно. Для снятия частотных характеристик реальной разомкнутой САУ на ее вход подают гармонический сигнал с изменяемой частотой и определяют изменение амплитуды и фазы выходного сигнала в зависимости от частоты. По полученным характеристикам определяют уравнение динамики, после чего САУ можно исследовать теоретически.
7.2. Законы регулирования

Пусть задана какая-то САР (рис.59).
Законом регулирования называется математическая зависимость, в соответствии с которой управляющее воздействие на объект вырабатывалось бы безынерционным регулятором.
Простейшим из них является пропорциональный закон регулирования, при котором
u(t) = Ke(t) (рис.60а),
где u(t) - это управляющее воздействие, формируемое регулятором, e(t) - отклонение регулируемой величины от требуемого значения, K - коэффициент пропорциональности регулятора Р.
То есть для создания управляющего воздействия необходимо наличие ошибки регулирования и чтобы величина этой ошибки была пропорциональна возмущающему воздействию f(t). Другими словами САУ в целом должна быть статической.
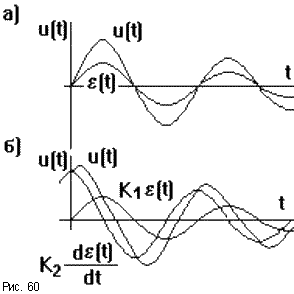
Такие регуляторы называют П-регуляторами.
Так как при воздействии возмущения на объект управления отклонение регулируемой величины от требуемого значения происходит с конечной скоростью (рис.60б), то в начальный момент на вход регулятора подается очень малая величина e , вызывая при этом слабые управляющие воздействия u. Для повышения быстродействия системы желательно форсировать процесс управления.
Для этого в регулятор вводят звенья, формирующие на выходе сигнал, пропорциональный производной от входной величины, то есть дифференцирующие или форсирующие звенья.
Такой закон регулирования называется пропорционально - дифференциальным:
u(t) = K1e(t) + K2 de(t)/dt.
В соответствии с ним работают ПД-регуляторы.
Чем быстрее нарастает отклонение регулируемой величины от требуемого значения, тем интенсивнее работает ПД-регулятор, что препятствует дальнейшему нарастанию данного отклонения. Кроме того при увеличении отклонения (de(t)/dt > 0) управляющий сигнал u будет больше, чем при уменьшении (de(t)/dt < 0), что также играет положительную роль, снижая колебательность процеса управления.
Добавление в регулятор двух дифференцирующих звеньев позволяет формировать управляющее воздействие по второй производной отклонения e , такой регулятор называется ПДД-регулятором.
Интегральный закон регулирования
реализуется И-регулятором, его формулировка:
 .
. Этот регулятор наращивает управляющее воздействие до тех пор пока управляемая величина отличается от требуемого значения, то есть пока e(t) 0.
И-регулятор обеспечивает астатическое регулирование.
При малых e управляющее воздействие изменяется с малой скоростью, поэтому данный регулятор очень инерционный.
Чтобы увеличить быстродействие обычно последовательно с ним включают усилитель, это дает пропорционально-интегральный закон регулирования (ПИ-регулятор), его формула:
 .
.Первое слагаемое обеспечивает быстродействие, второе - астатичность, то есть точность регулирования.
Еще большее быстродействие обеспечивается при добавлении слагаемого, пропорционального производной от отклонения управляемой величины de/dt, такой закон регулирования обеспечивается ПИД-регулятором, его формула:
 .
. Лекция 8. Алгебраические критерии устойчивости
8.1. Понятие устойчивости системы
Под устойчивостью системы понимается способность ее возвращаться к состоянию установившегося равновесия после снятия возмущения, нарушившего это равновесие. Неустойчивая система непрерывно удаляется от равновесного состояния или совершает вокруг него колебания с возрастающей амплитудой.

Устойчивость линейной системы определяется не характером возмущения, а структурой самой системы (рис.61). Говорят, что система устойчива "в малом", если определен факт наличия устойчивости, но не определены ее границы. Система устойчива "в большом", когда определены границы устойчивости и то, что реальные отклонения не выходят за эти границы.
В соответствии с классическим методом решение дифференциального уравнения ищется в виде:
y(t) = yвын(t) + yсв(t).
Здесь yсв(t) - общее решение однородного дифференциального уравнения, то есть уравнения с нулевой правой частью:
aoy(n) + a1y(n-1) + ... + a(n-1)y’ + a(n)y = 0.
Физически это означает, что все внешние воздействия сняты и система абсолютно свободна, ее движения определяются лишь собственной структурой. Поэтому решение данного уравнения называется свободной составляющей общего решения. yвын(t) - частное решение неоднородного дифференциального уравнения, под которым понимается уравнение с ненулевой правой частью. Физически это означает, что к системе приложено внешнее воздействие u(t). Поэтому вторая составляющая общего решения называется вынужденный. Она определяет вынужденный установившийся режим работы системы после окончания переходного процесса.
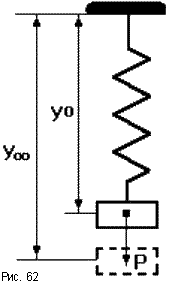 Можно провести аналогию между САУ и пружиной, колебания которой описываются аналогичным дифференциальным уравнением (рис.62). Оттянем пружину, а затем отпустим, предоставив ее самой себе. Пружина будет колебаться в соответствии со свободной составляющей решения уравнения, то есть характер колебаний будет определяться только структурой самой пружины. Если в момент времени t = 0 подвесить к пружине груз, то на свободные колебания наложится внешняя сила Р. После затухания колебаний, описываемых только свободной составляющей общего решения, система перейдет в новый установившийся режим, характеризуемый вынужденной составляющей yвын = y(t ). Если внешнее воздействие само будет изменяться по синусоидальному закону P = Posin( t + ), то после затухания переходного процесса система будет совершать вынужденные колебания с той же частотой, что и вынуждающая сила, то есть yвын = ymaxsin( t + y).
Можно провести аналогию между САУ и пружиной, колебания которой описываются аналогичным дифференциальным уравнением (рис.62). Оттянем пружину, а затем отпустим, предоставив ее самой себе. Пружина будет колебаться в соответствии со свободной составляющей решения уравнения, то есть характер колебаний будет определяться только структурой самой пружины. Если в момент времени t = 0 подвесить к пружине груз, то на свободные колебания наложится внешняя сила Р. После затухания колебаний, описываемых только свободной составляющей общего решения, система перейдет в новый установившийся режим, характеризуемый вынужденной составляющей yвын = y(t ). Если внешнее воздействие само будет изменяться по синусоидальному закону P = Posin( t + ), то после затухания переходного процесса система будет совершать вынужденные колебания с той же частотой, что и вынуждающая сила, то есть yвын = ymaxsin( t + y).Каждая составляющая общего решения уравнения динамики ищется отдельно. Вынужденная составляющая ищется на основе решения уравнения статики для данной системы для времени t . Свободная составляющая представляет собой сумму из n отдельных составляющих:
 , где pi корни характеристического уравнения D(p) = a0pn + a1pn-1 + a2pn-2 + ... + an = 0. Корни могут быть либо вещественными pi = ai, либо попарно комплексно сопряженными
, где pi корни характеристического уравнения D(p) = a0pn + a1pn-1 + a2pn-2 + ... + an = 0. Корни могут быть либо вещественными pi = ai, либо попарно комплексно сопряженными

