Файл: Электрификация и автоматизация технологических процессов в условиях ао мосметрострой.doc
Добавлен: 25.04.2024
Просмотров: 76
Скачиваний: 1
ВНИМАНИЕ! Если данный файл нарушает Ваши авторские права, то обязательно сообщите нам.
В состав данного блока входят: непосредственно микроконтроллер МК, схемы согласования входных сигналов САС (СДС), устройство сопряжения микроконтроллера с пультом диспетчера УС и блок согласования микроконтроллера с исполнительным механизмом БСВ.
Схемы согласования входных сигналов предназначены для формирования стандартных логических уровней для работы микроконтроллера, а также для гальванической развязки по питанию выходных цепей датчиков и входа микроконтроллера.
В схеме согласования аналоговых сигналов САС использованы компараторы, предназначенные для сравнения сигналов, а дискретных СДС – оптроны, которые благодаря небольшим размерам получили широкое распространение при разработке различных устройств сопряжения.
Микроконтроллер МК серии АТ90S8535 (АTmega16) служит для обработки входных сигналов и формирования соответствующих команд управления положением задвижки. Применим микроконтроллер AT90LS8535 фирмы Atmel, относящийся к AVR-семейству 8-разрядных RISС-микроконтроллеров.
Архитектура данного микроконтроллера включает 8кБ загружаемой флэш-памяти программ; 512 байт ОЗУ; 512 байт EEPROM; 32 линий ввода/вывода общего назначения; восьмиканальный десятиразрядный АЦП; программируемый универсальный последовательный порт; SPI последовательный порт для загрузки программ [13].
Загружаемая флэш-память на кристалле может быть перепрограммирована прямо в системе через последовательный интерфейс SPI или доступным программатором энергонезависимой памяти. Микроконтроллеры AVR обладают следующими основными характеристиками:
-
очень быстрая гарвардская RISC-архитектура загрузки и выполнения большинства инструкций на протяжении одного цикла тактового генератора, при этом достигается скорость работы приблизительно 1 MIPS на МГц (MIPS – Millions Instructions per Second – миллион операций в секунду), отсутствует внутреннее разделение частоты; -
программы содержатся в электрически перепрограммируемой постоянной памяти программ FLASH ROM. Эта память может быть перепрограммирована до 1000 раз.
Это облегчает настройку и отладку систем. Кроме того, возможность внутрисхемного программирования позволяет не вынимать микроконтроллер из целевой схемы в процессе программирования, что значительно ускоряет процесс разработки систем на основе этих микроконтроллеров;
-
система команд микроконтроллеров AVR сначала проектировалась с учетом особенностей языка программирования высокого уровня, что в результате позволяет получать после компиляции программ наиболее эффективный код, чем для других микроконтроллеров.
Это способствует уменьшению полученного кода (в объеме памяти на кристалле) и увеличению скорости работы микроконтроллера;
-
микроконтроллеры AVR имеют 32 регистра, напрямую работающих с арифметико-логическим устройством (АЛУ), это значительно уменьшает размер программ; -
очень небольшое потребление энергии и наличие нескольких режимов (режим холостого хода (Idle Mode) и экономический режим работы со сниженным потреблением энергии (Power Down Mode)); -
наличие дешевых и простых в использовании программных средств (отладчик AVR-Studio, ассемблер Wavrasm, большое количество программаторов); -
наличие перепрограммируемой постоянной памяти данных EEPROM, которая может быть перепрограммирована более 100000 раз.
Рассмотрим обозначение выводов микроконтроллера:
-
VCC – вывод источника питания; GND – земля; RESET – вход сброса, при удержании на входе низкого уровня в течение двух машинных циклов (если генератор работает), сбрасывает устройство; -
XTAL1 – вход инвертирующего усилителя генератора и вход внешнего тактового сигнала; -
XTAL2 – выход инвертирующего усилителя генератора; четыре 8-разрядные порта ввода-вывода (А, В, С, D); -
SPI-интерфейс представлен входом данных (вывод микроконтроллера MOSI (РВ5), выходом данных (вывод микроконтроллера MISO (РВ6), входом тактовых импульсов (вывод микроконтроллера SCK (РВ7)).
Для запуска микроконтроллера в работу применяются специальные цепочки, приведенные на рисунке 8. Данные цепочки служат для обеспечения настройки контроллера на заданную тактовую частоту, а также для сброса контроллера по входу Reset. Согласно инструкции к контроллеру AT90S8535 он тактируется частотой 8МГц, формируемой элементами C2, C3, Z1.
В качестве кварцевого генератора используем генератор типа РК170БА-14БП-12000К, а емкости С2 и С3 для данного генератора примем типа КД-2-М47-33пФ. Устройство сопряжения микроконтроллера с пультом диспетчера УС, в качестве которого используется промышленный интерфейс последовательной передачи информации RS-485, обеспечивает передачу полученных с микроконтроллера данных на ЭВМ диспетчера шахты.
Эта информация может регистрироваться, сохраняться в памяти ЭВМ. При необходимости можно вызвать эту информацию на дисплей и при наличии уже специального обеспечения можно визуально просматривать работу насосной установки. На выходе МК формируется сигнал малой мощности, недостаточный для воздействия на привод задвижки. Поэтому используем схему согласования по выходу данного блока БСВ, обеспечивающую временную задержку выходного сигнала и его усиление по мощности.

Блок светоиндикации БСИ предназначен для сигнализации о нештатных состояниях насосной установки. Согласование БСИ с МК не требуется, так как выходные порты МК обладают достаточной нагрузочной способностью для питания полупроводниковых светодиодов.
В качестве исполнительного механизма ИМ используется дросселирующий орган – задвижка, приводной шток которой оборудован двумя концевыми выключателями КВО, КВЗ, предназначенными для фиксации рабочего органа задвижки в крайних положениях с возможностью установки его в любом промежуточном положении по сигналам, поступающим с выхода формирователя управляющих команд – микроконтроллера разрабатываемого устройства.
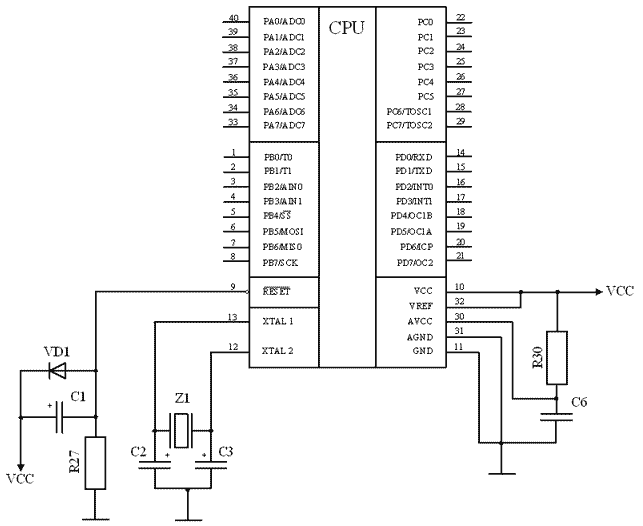
Рисунок 3.9 – Схема микроконтроллера AT90S8535 с цепочками, служащими для обеспечения настройки на заданную тактовую частоту и сброса контроллера по входу Reset
3.5 Разработка математической модели управления насосом в зоне промышленного использования
В ходе исследований получена также математическая модель управления насосом в зоне промышленного использования дросселированием потока. Располагая напорными характеристиками насоса Нм и сети Нс, зависимостью, по которой изменяется местное гидравлическое сопротивление ξ (зависящее от степени открытия затвора), а также характеристикой подводящего трубопровода Нвак и кавитационной характеристикой насоса определим координаты рабочего режима и получим график изменения напорных характеристик трубопроводной сети на границах рабочей зоны насоса (при разных геометрических высотах водоподъема) в условиях безкавитационной работы установки, приведенный на рисунке 3.10.
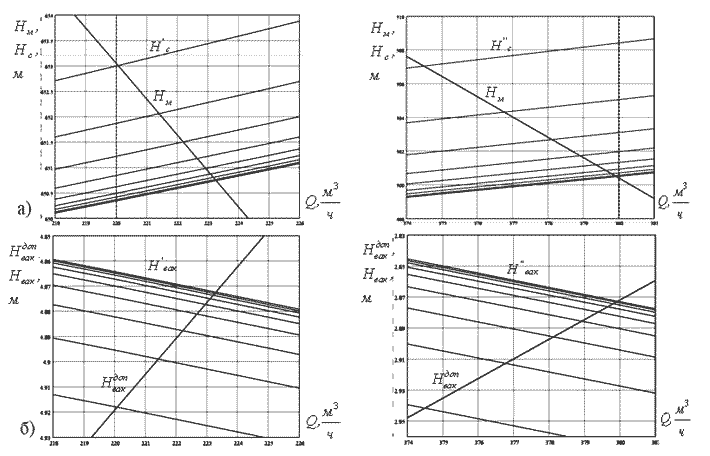
а) напорных характеристик трубопроводной сети при разных геометрических высотах водоподъема; б) Hвак в условиях безкавитационной работы установки
Рисунок 3.11 – Графики изменения напорных характеристик
Построенные графики дают представление о значении подачи насоса при регулировании с помощью степени открытия затвора проходного вентиля x , а также соответствующее ему значение уровня воды в водосборнике h . Эти данные можно использовать для построения графиков изменения уровня воды во времени рисунок 10.
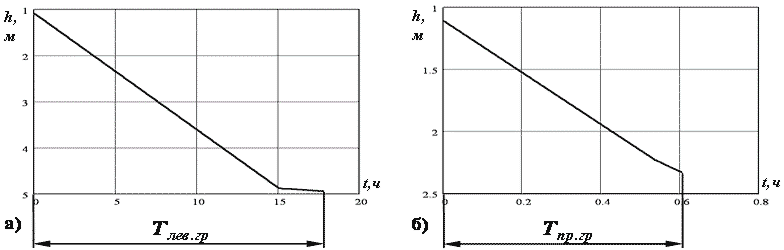
а) на левой границе рабочей зоны; б) на правой границе рабочей зоны
Рисунок 11 – Графики изменения уровня воды в водосборнике
Итак, как видно из рисунка 10, работа насосной установки наиболее эффективна во втором случае (на правой границе рабочей зоны насоса), поскольку время (Tпр.гр=0,603 ч), за которое насос откачает воду с 1,1 до 2,151м, меньше, чем время (Tлев.гр=17,741 ч), за которое насос откачает воду с 1,1 до 4,648м.
Полученная математическая модель может быть в дальнейшем использована в блоке управления насосной установкой в зоне промышленного использования насоса для определения уставок управления подачей насоса.
3.6 Исследование переходных процессов при регулировании насосной установки по подаче
При эксплуатации водоотливных установок, особенно при большой высоте нагнетания, появляется опасность разрыва стенок нагнетательных трубопроводов из-за повышенных давлений вследствие появления гидравлического удара, вызванного изменением скорости движений воды. Как показывают расчеты и подтверждают результаты натурных экспериментов, а также опыт эксплуатации, в шахтных водоотливных установках при гидравлических ударах возможно значительное повышение давления (до 4...5 МПа), в сравнение с рабочим.
Это может вызвать порыв труб и потерю их продольной устойчивости на вертикальных участках, разгерметизацию фланцевых соединений, выход из строя арматуры и других элементов установки. Серьезную опасность представляет также колебательный характер изменения давления при гидроударах. В определенных условиях могут возникнуть резонансные явления, что особенно опасно для вертикального става.
Исследованиями установлено, что спектр собственных частот колебаний отдельных элементов в значительной степени зависит от момента инерции сечения трубы, который в процессе эксплуатации из-за коррозии изменяется в широких пределах [16].
По данным расчетов практически для любого водоотливного трубопровода в процессе его старения наступит момент, когда собственная частота совпадает с частотой колебаний давления при гидравлическом ударе. Для ликвидации этого нежелательного явления на водоотливных установках необходимо провести противоударные мероприятия.
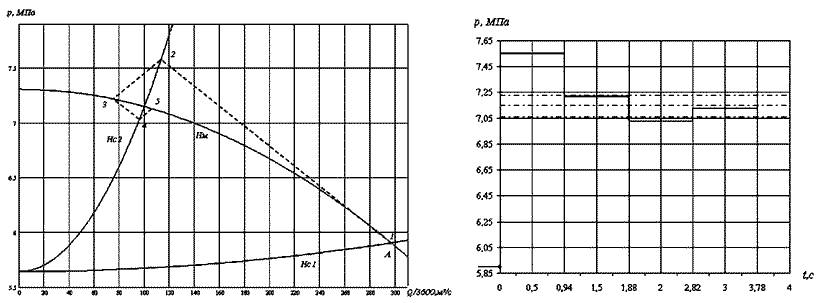
Для предотвращения недопустимых колебаний давления в шахтной практике используются два способа регулирования насосной установки по подаче – изменение скорости вращения вала двигателя насоса и дросселирование потока с помощью задвижки. Для определения гидравлического удара используем приближенный графоаналитический метод расчета. Проведем анализ колебаний давления при разных способах регулирования установки, состоящей из насоса ЦНС 300-120-600, трубопровода длиной L=612 м, диаметром d=0,229 м при геометрической высоте подъема H
г=612 м, результаты которого приведены на рисунках 11 и 12.
Проанализировав полученные результаты, можно сделать вывод, что регулирование наиболее эффективно при изменении скорости вращения двигателя насоса, поскольку при этом способе прирост давления при первом полном отражении ударной волны (t=0,94 c) составляет Δp=0,76 МПа (при дросселировании потока – Δp=1,65 МПа), а также время затухания переходного процесса составляет tзат=1,5 с (при дросселировании потока – tзат=3 с).
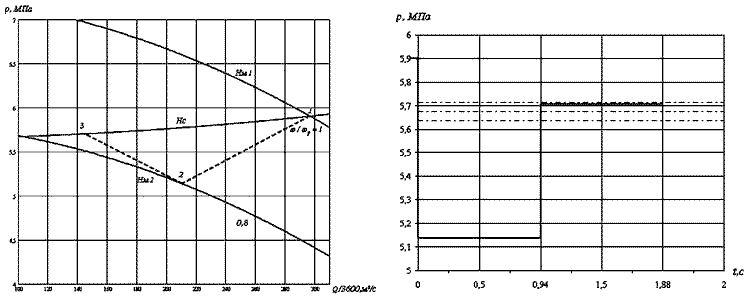
а) – графический расчет; б) – изменение давления во времени
Рисунок 3.12 – Расчет колебаний давления при изменении скорости вращения двигателя насоса
а) – графический расчет; б) – изменение давления во времени
Рисунок 3.14 – Расчет колебаний давления при дросселировании потока